【论文阅读】End-to-End Model-Free Reinforcement Learning for Urban Driving Using Implicit Affordances
文章名:CVPR2020: End-to-End Model-Free Reinforcement Learning for Urban Driving Using Implicit Affordances
Column: December 14, 2021 11:15 AM
Last edited time: December 31, 2021 6:46 PM
Sensor: 1 RGB
Status: Finished
Summary: RL; carla leaderboard
Type: CVPR
Year: 2020
引用量: 44
-
参考与前言 resource
代码:https://github.com/valeoai/LearningByCheating;虽然代码是lbc的名字 但是其实是作者fork过来的,然后基于lbc基础上进行自添加删除等 hhhh (原来fork过来的是没有issue栏了 emmm)
视频:
1. Motivation
IL DRL 对比
首先主要是指出模仿学习的缺点:因为专家的数据都是great,也就是你承认他开车开得对,没有开错的,这也就造成了一个distribution mismatch,只有好的数据;当然也有文章[1,32] 指出:那我就填开错的数据进去,但是呢 这种数据一般都是车保持在本车道/lateral control
所以呢,DRL不会有distribution mismatch的问题,因为他的数据都是在提供reward signal下通过RL来学的,而这种情况下呢,不是说车开的对错,而是你车开的好坏 how good action taken
但是呢DRL也面临着一些问题:
- 依赖于replay buffer,而这个buffer又会限制input size比较小
- black box → 所以有些方法是先提取信息,比如得到分割图片后在传到controller,以此检验是否关注到信息点了
Contribution
根据前面的对比,引出自己的contribution:
-
我们是第一个成功使得RL在复杂驾驶环境上用的,环路相遇和交通灯识别等
-
引入了一种新的技术:implicit affordance 使得RL可以在 大网络下 和 大input size 使用replay remory的训练
主要就是两个阶段,这样RL这边接收的就不是raw image,memory剩下20倍左右。→ 好像之前想的降维操作哎
- 用resnet18框架去输出 feature
- 然后 RL 接收 这个降维后的feature
-
做了 implicit affordance 和 reward shaping 的消融实验
总的来看 contribution除了第二点,emm 其他贡献其他文章也基本有的;
第二点最好再仔细看一下method部分
不过我感觉这个introduction写的不错哎,比较全和明了去介绍并提出了贡献点二,可以借鉴一下
2. Method
- 输入是1个相机(4张连续时间的图片),加RGB是3个通道,一共下来12个通道,那应该是batch_size x 12 x 288 x 288
- 输出是方向盘转角和油门
整个框架
RL 设置
首先选的是value-based method,当然这样的设置就导致我们看的动作都是离散的,文中并没有做policy-based的对比(挖坑 后面做),借鉴开源的Rainbow-IQN Ape-X 但是去掉了dueling network
温馨链接:RL policy-based method和value-based method区别
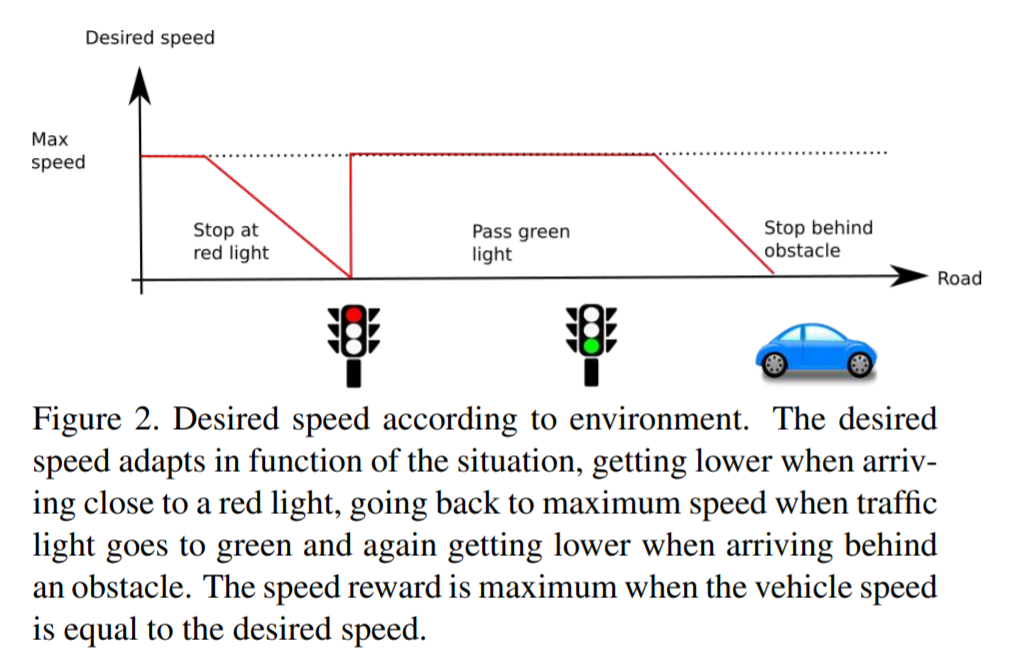
Reward Shaping
原来这个shaping是指... reward setting
计算的方法主要是 Carla提供了waypoint的API来进行判断,当遇到路口的时候,随机选择(左、右、直走),reward主要由以下三个决定
-
desired speed:reward range [0,1]
如果在期望速度给最大1,然后线性打分当速度高了或者是低了,本文中期望速度为40km/h
-
展开可见图片示意
-
-
desired position:reward range [-1,0]
如果刚好在道路中心的路径点给0,然后和相距距离成反比的给负reward,以下两种情况episode直接停止,并设reward为-1,本文设置\(D_{max}=2\text{m}\) 也正是中心线到路边缘的距离
- 与中心路径点相距超过\(D_{max}\)
- 与其他东西相撞,闯红绿灯,前无障碍物/红灯时 车辆停下来
-
desired rotation
这一个设置的是因为 作者发现只有前两个的时候,车子会在有障碍物的时候直接停下,而不是绕行,因为绕行会让他的第二个reward下降,直行的话又会使他撞上去 → 有做消融实验证明
reward 和 optimal trajectory的angle差距值成反比
-
噢 是不是 他在开头嫌弃的那个carla的expert?→ 不对啊 他不会换道呀
Network
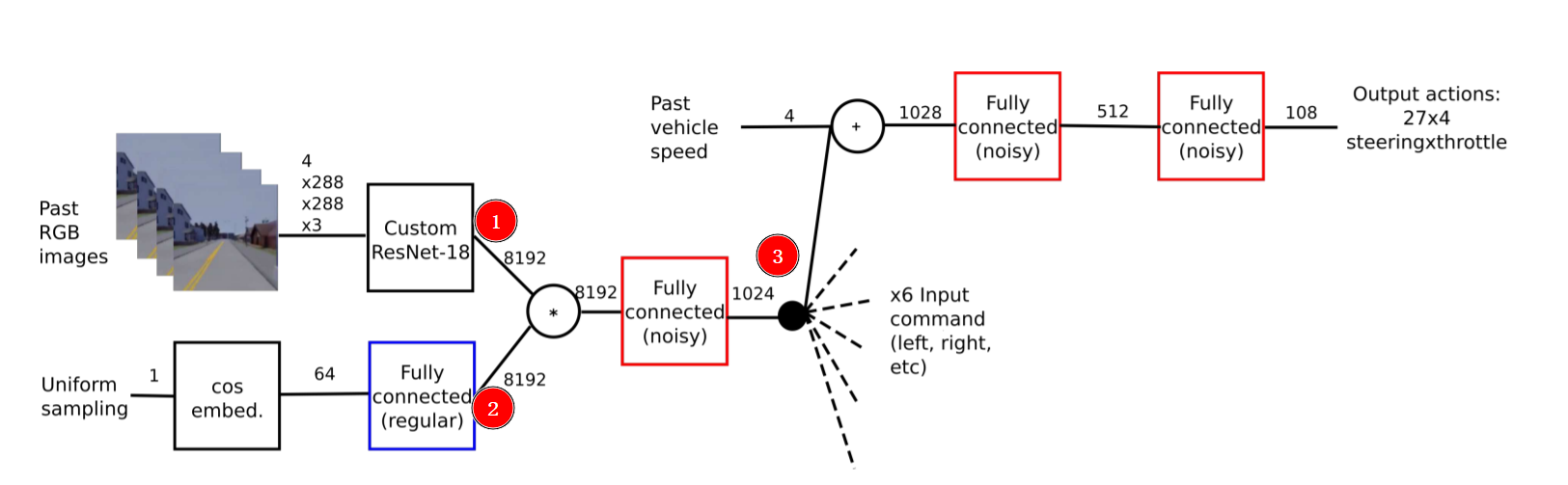
整体图
① RGB → resnet那层,在classif_state_net这层输出,把他展开成一维的长度:8192
classif_state_net = encoding.view(-1, self.size_state_RL)
② 这层有点奇怪,主要是这个框图奇怪,首先对着代码仅有的model看,输入不是什么uniform sampling 而是直接上面的image那里encoder的值,只是经过过的不是view(-1) 而是几层sampled_block → 也就是代码中没有体现②和③ → 破案了,没体现② 但是③后面的有了 在DQN model里面,直接是每个noisyLayer下的两个linear+relu搞定到output输出
只看①对应的直接下图的decoder部分:
-
下图下半部:展开一维长度8192,再经过一层Linear&relu 到1024长度
return classif_output, state_output, dist_to_tl_output, delta_position_yaw_output -
下图上半部:在展成一维前,输入到另一个四层的sampled_block形式 [Upsample,Conv2d,BatchNorm2d,ReLU,Conv2d,BatchNorm2d],直接输出
return out_seg但是这里有个问题是,实际操作代码输出的尺寸应该是24x73x128,而且代码里也是直接按照这个输入到DQN那边的rl_state_net的
喔 原来这步是decoder的输出,看这幅图:(第一幅画的什么呀 emmm)
①:经过完resnet18后还走了一层 [Conv2d,BatchNorm2d],然后展成一维:8192
-
decoder:在①展成一维前,输入到另一个四层的sampled_block形式 [Upsample,Conv2d,BatchNorm2d,ReLU,Conv2d,BatchNorm2d],然后输出是out_seg
# Segmentation branch upsample0 = self.up_sampled_block_0(encoding) # 512*8*8 or 512*6*8 (crop sky) upsample1 = self.up_sampled_block_1(upsample0) # 256*16*16 or 256*12*16 (crop sky) upsample2 = self.up_sampled_block_2(upsample1) # 128*32*32 or 128*24*32 (crop sky) upsample3 = self.up_sampled_block_3(upsample2) # 64*64*64 or 64*48*64 (crop sky) upsample4 = self.up_sampled_block_4(upsample3) # 32*128*128 or 32*74*128 (crop sky) out_seg = self.last_bn(self.last_conv_segmentation(upsample4)) # nb_class_segmentation*128*128 # =================================================== # We will upsample image with nearest neightboord interpolation between each umsample block # https://distill.pub/2016/deconv-checkerboard/ self.up_sampled_block_0 = create_resnet_basic_block(6, 8, 512, 512) self.up_sampled_block_1 = create_resnet_basic_block(12, 16, 512, 256) self.up_sampled_block_2 = create_resnet_basic_block(24, 32, 256, 128) self.up_sampled_block_3 = create_resnet_basic_block(48, 64, 128, 64) self.up_sampled_block_4 = create_resnet_basic_block(74, 128, 64, 32) # =================================================== def create_resnet_basic_block( width_output_feature_map, height_output_feature_map, nb_channel_in, nb_channel_out ): basic_block = nn.Sequential( nn.Upsample(size=(width_output_feature_map, height_output_feature_map), mode="nearest"), nn.Conv2d( nb_channel_in, nb_channel_out, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False, ), nn.BatchNorm2d( nb_channel_out, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True ), nn.ReLU(inplace=True), nn.Conv2d( nb_channel_out, nb_channel_out, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False, ), nn.BatchNorm2d( nb_channel_out, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True ), ) return basic_block
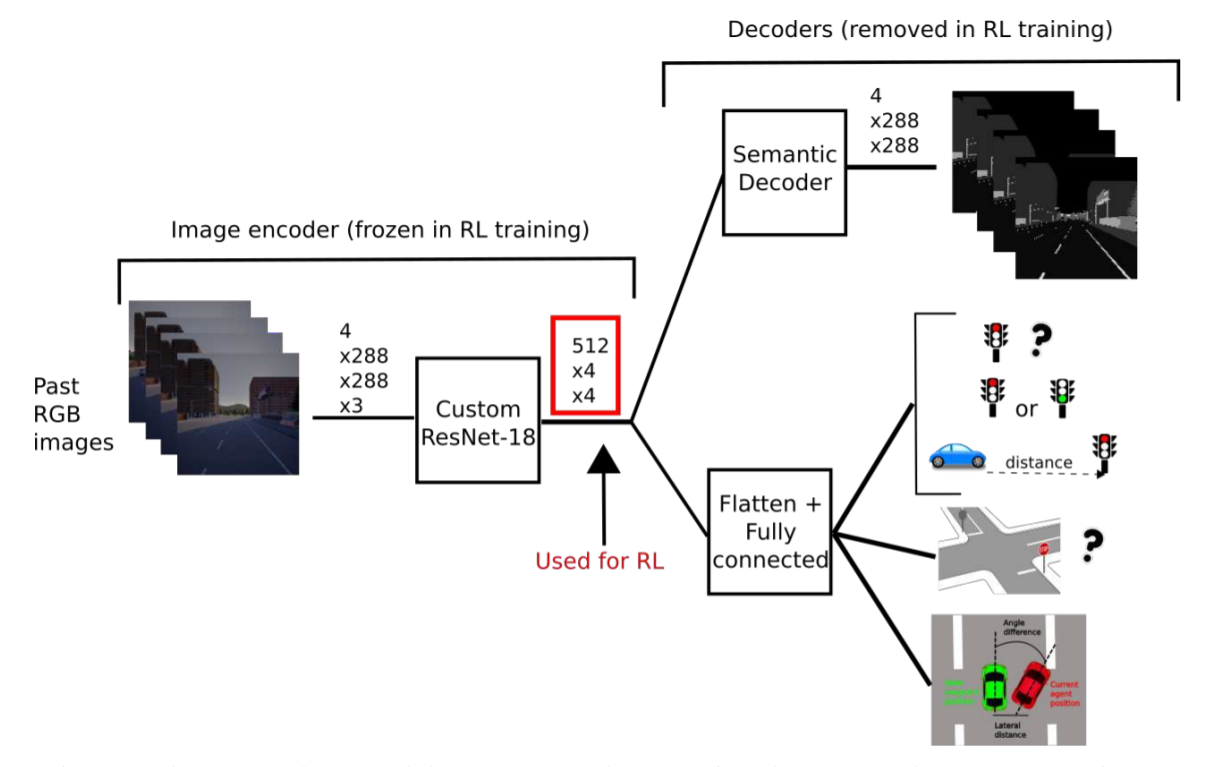
image输入框架
总结一下:
- 作者没有公布自己的数据集,也没有公开怎样拿到的expert数据以训练出这样一个model的,而是直接给了一个稍微训练好的model权重文件
- 实际有了model后,整个流程就是收到图片,输出resnet18后的数据,分两道:
- 走到semantic decoder,输出
out_seg - 走到flatten展开一维,然后再经过不同的Linear配置,各自输出:
state_output, dist_to_tl_output, delta_position_yaw_output
- 走到semantic decoder,输出
- 最后第二点的a+b.一起展成一维的,再输出到DQN那边进行一层Linear+relu,同收到的speed和steering一起 再走到三层Linear 最后输出的action
3. Conclusion
看完全文+代码,再看这个结论部分,多少有点code lie → 因为第二点 using a value-based Rainbow-IQN-Apex training with an adapted reward!没有在代码中进行体现
- large conditional netwrok:估计是指自己先通过resnet18 铺平后送入DQN的意思吧
- implicit affordance:分开输出out_seg和图二所示的下部分(红绿灯、速度、偏航角偏移) 但其实DQN那里基本也是一起一维到DQN的,只是说中途有个好展示的东西?但是论文里也没给出这一个中间小输出是长什么样的
- future work 可以对比一下value-based, policy-based and actor-critic,所以这就是不给出value-based 的 code原因?怕太卷了 大家直接看到就卷出来了
碎碎念
emmm 但是不得不说这个作者在leaderboard提交的 还是比较厉害的:人家可是只用了一个相机!看看在他前面的传感器使用量都是直接拉满到四个。
但是感觉这个应该是训练了很久的,不然不至于一年过后的今天还是不在repo中给出自己hard task的结果 hhhh

