
在做路径规划时,通常把三轮或者四轮阿克曼车简化为两轮自行车模型以计算转弯半径R
图中Lb是轴距,ICC是瞬时转弯中心,图中的α 1和α2是前轮实际转角,α是等效的前轮转角,
φ 是航向角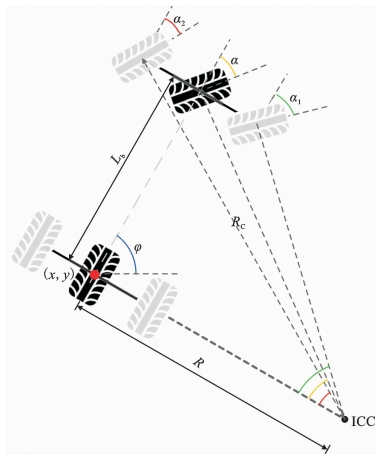
在上述自行车模型中,由前轮+后轮+瞬时转弯中心构成一个三角形
已知轴距Lb,黄色圆弧所示的角度为 等效的前轮转角α ,α能达到的最大角度通常也是已知的
当前轮转向角达到极限时,转弯半径最小
可以推出 Lb/R = tanα ,从而 R = Lb/tanα
代入Lb 和 α 能达到的最大角度就能计算出R
为了给控制留一些余量,通常取最小转弯半径Rreal,Rreal视情况比R略大一点即可
参考论文:基于预定义几何集的斜列式泊车路径规划方法

 浙公网安备 33010602011771号
浙公网安备 33010602011771号