Attention:注意力机制
Attention机制
1. Attention机制的本质思想
如果把Attention机制从上文讲述例子中的Encoder-Decoder框架中剥离,并进一步做抽象,可以更容易看懂Attention机制的本质思想。
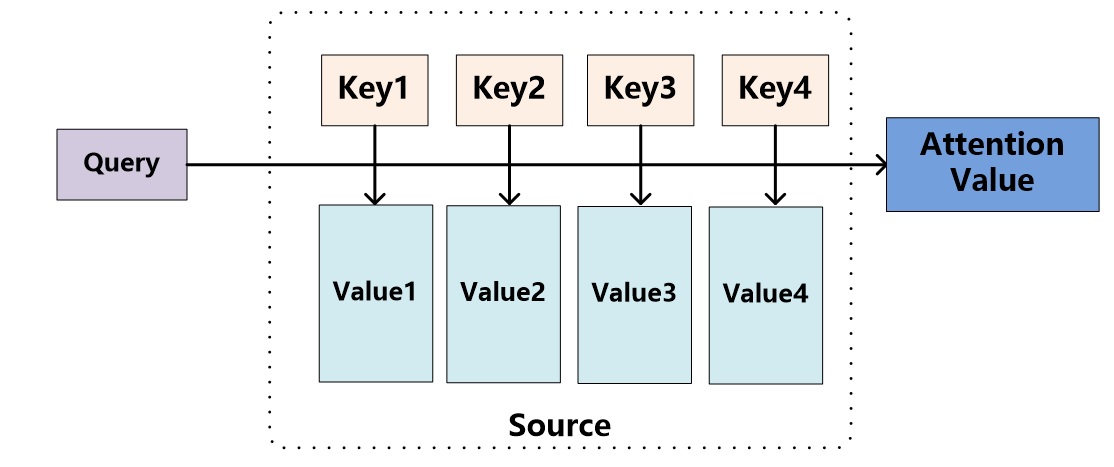
将Source中的构成元素想象成是由一系列的<Key,Value>数据对构成,此时给定Target中的某个元素Query,通过计算Query和各个Key的相似性或者相关性,得到每个Key对应Value的权重系数,然后对Value进行加权求和,即得到了最终的Attention数值。所以本质上Attention机制是对Source中元素的Value值进行加权求和,而Query和Key用来计算对应Value的权重系数。即可以将其本质思想改写为如下公式:

机器翻译的例子里,在计算Attention的过程中,Source中的Key和Value合二为一,指向的是输入句子中每个单词对应的语义编码,所以不容易看出这种能够体现本质思想的结构。
把Attention仍然理解为从大量信息中有选择地筛选出少量重要信息并聚焦到这些重要信息上,忽略大多不重要的信息,这种思路仍然成立。
Attention机制的具体计算过程,如果对目前大多数方法进行抽象的话,可以将其归纳为两个过程:第一个过程是根据Query和Key计算权重系数,第二个过程根据权重系数对Value进行加权求和。而第一个过程又可以细分为两个阶段:第一个阶段根据Query和Key计算两者的相似性或者相关性;第二个阶段对第一阶段的原始分值进行归一化处理;这样,可以将Attention的计算过程抽象为如图展示的三个阶段。
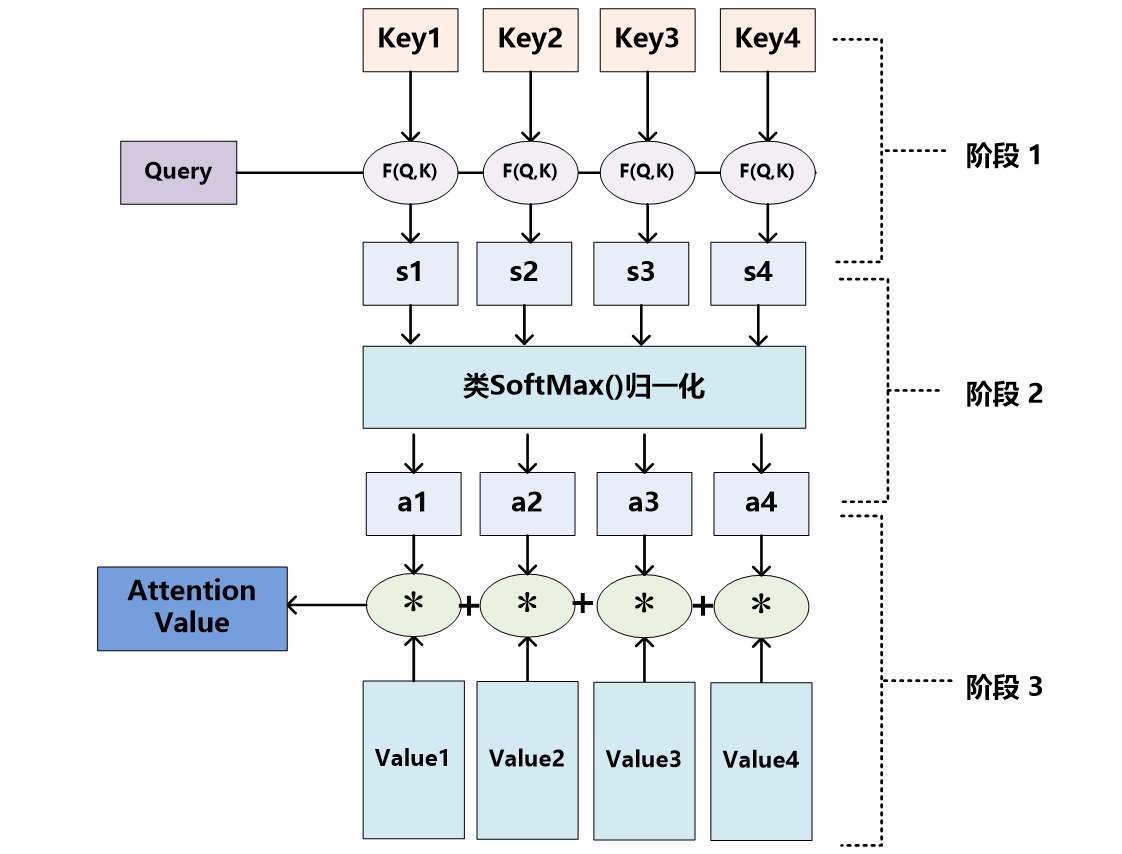
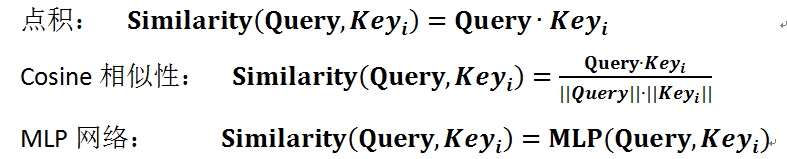
在第一个阶段,可以引入不同的函数和计算机制,计算两者的相似性或者相关性,最常见的方法包括:求两者的向量点积、求两者的向量Cosine相似性或者通过再引入额外的神经网络来求值。
第一阶段产生的分值根据具体产生的方法不同其数值取值范围也不一样,第二阶段引入类似SoftMax的计算方式对第一阶段的得分进行数值转换,一方面可以进行归一化,将原始计算分值整理成所有元素权重之和为1的概率分布;另一方面也可以通过SoftMax的内在机制更加突出重要元素的权重。即一般采用如下公式计算:

第二阶段的计算结果a_i即为value_i对应的权重系数,然后进行加权求和即可得到Attention数值:

通过如上三个阶段的计算,即可求出针对Query的Attention数值,目前绝大多数具体的注意力机制计算方法都符合上述的三阶段抽象计算过程。
2. Self Attention模型
在一般任务的Encoder-Decoder框架中,输入Source和输出Target内容是不一样的,比如对于英-中机器翻译来说,Source是英文句子,Target是对应的翻译出的中文句子,Attention机制发生在Target的元素Query和Source中的所有元素之间。而Self Attention指的不是Target和Source之间的Attention机制,而是Source内部元素之间或者Target内部元素之间发生的Attention机制。对于机器翻译来说,本质上是目标语单词和源语单词之间的一种单词对齐机制。
通过Self Attention到底学到了哪些规律或者抽取出了哪些特征呢?Self Attention可以捕获同一个句子中单词之间的一些句法特征(比如有一定距离的短语结构)或者语义特征(比如its的指代对象Law)。Self Attention后会更容易捕获句子中长距离的相互依赖的特征,因为如果是RNN或者LSTM,需要依次序序列计算,对于远距离的相互依赖的特征,要经过若干时间步步骤的信息累积才能将两者联系起来,而距离越远,有效捕获的可能性越小。Self Attention在计算过程中会直接将句子中任意两个单词的联系通过一个计算步骤直接联系起来,所以远距离依赖特征之间的距离被极大缩短,有利于有效地利用这些特征。除此外,Self Attention对于增加计算的并行性也有直接帮助作用。这是为何Self Attention逐渐被广泛使用的主要原因。
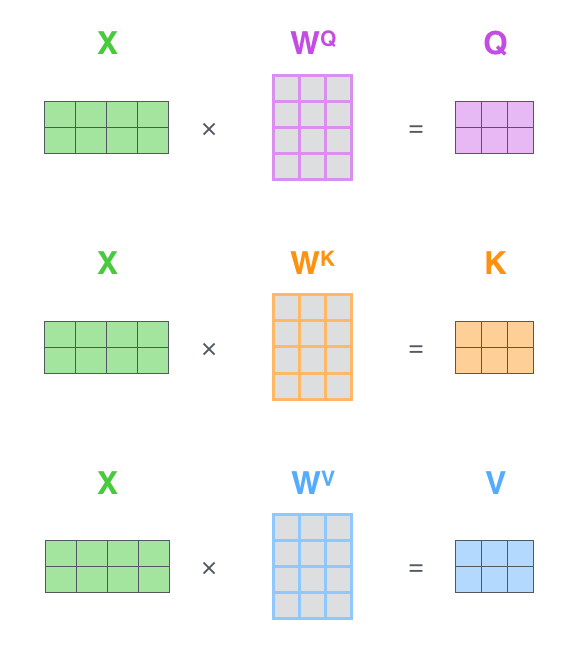
计算自注意力的第一步就是从每个编码器的输入向量(每个单词的词向量)中生成三个向量。也就是说对于每个单词,我们创造一个查询向量、一个键向量和一个值向量。这三个向量是通过词嵌入与三个权重矩阵后相乘创建的。X1与WQ权重矩阵相乘得到q1, 就是与这个单词相关的查询向量。最终使得输入序列的每个单词的创建一个查询向量、一个键向量和一个值向量。

计算自注意力的第二步是计算得分。假设我们在为这个例子中的第一个词“Thinking”计算自注意力向量,我们需要拿输入句子中的每个单词对“Thinking”打分。这些分数决定了在编码单词“Thinking”的过程中有多重视句子的其它部分。这些分数是通过打分单词(所有输入句子的单词)的键向量与“Thinking”的查询向量相点积来计算的。所以如果我们是处理位置最靠前的词的自注意力的话,第一个分数是q1和k1的点积,第二个分数是q1和k2的点积。
第三步和第四步是将分数除以8(8是论文中使用的键向量的维数64的平方根,这会让梯度更稳定。这里也可以使用其它值,8只是默认值),然后通过softmax传递结果。softmax的作用是使所有单词的分数归一化,得到的分数都是正值且和为1。
这个softmax分数决定了每个单词对编码当下位置(“Thinking”)的贡献。显然,已经在这个位置上的单词将获得最高的softmax分数,但有时关注另一个与当前单词相关的单词也会有帮助。
第五步是将每个值向量乘以softmax后的分数,即对V_i加权求和。

2.1 Self-Attention 的矩阵计算
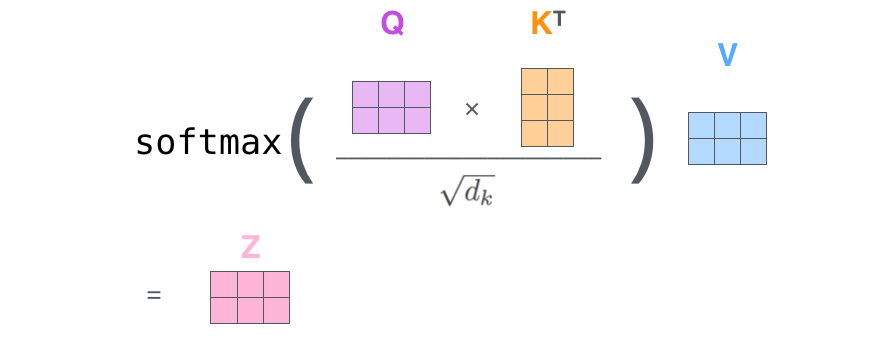
第一步是计算查询矩阵、键矩阵和值矩阵。为此,将输入句子的词嵌入拼接成矩阵X(X 矩阵中的每一行对应于输入句子中的一个词),将X乘以要训练的权重矩阵(WQ,WK,WV)。
由于我们处理的是矩阵,我们可以将步骤2到步骤6合并为一个公式来计算自注意力层的输出。
2.2 加入位置编码的词嵌入
到目前为止,我们对模型的描述缺少了一种理解输入单词顺序的方法。
为了解决这个问题,Transformer为每个输入的词嵌入添加了一个向量。这些向量遵循模型学习到的特定模式,这有助于确定每个单词的位置,或序列中不同单词之间的距离。这里的直觉是,将位置向量添加到词嵌入中使得它们在接下来的运算中,能够更好地表达的词与词之间的距离。
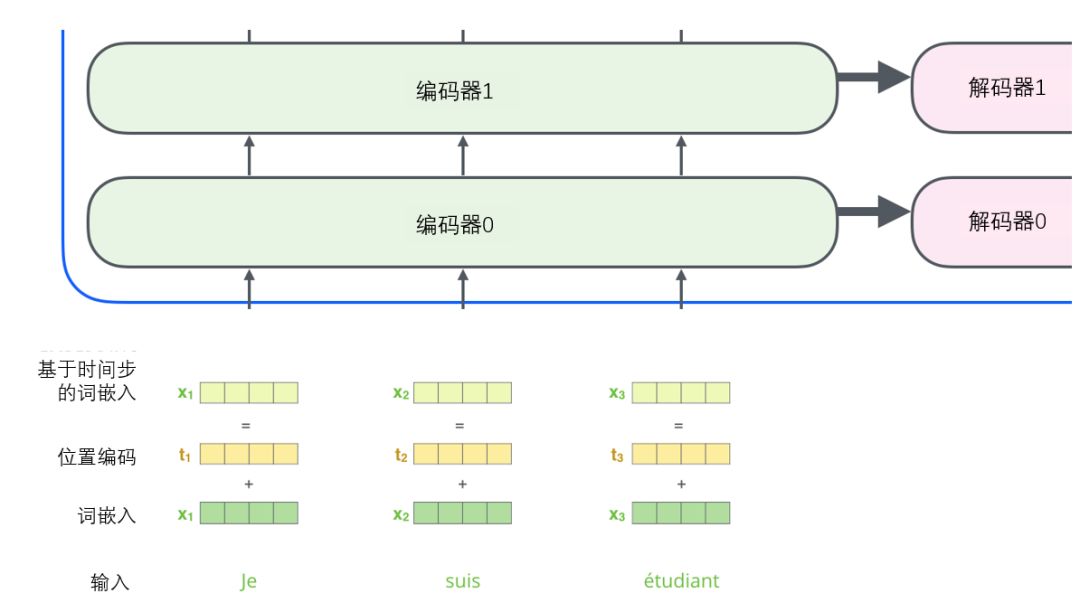
为了让模型理解单词的顺序,我们添加了位置编码向量,这些向量的值遵循特定的模式。如果我们假设词嵌入的维数为4,则实际的位置编码如下:
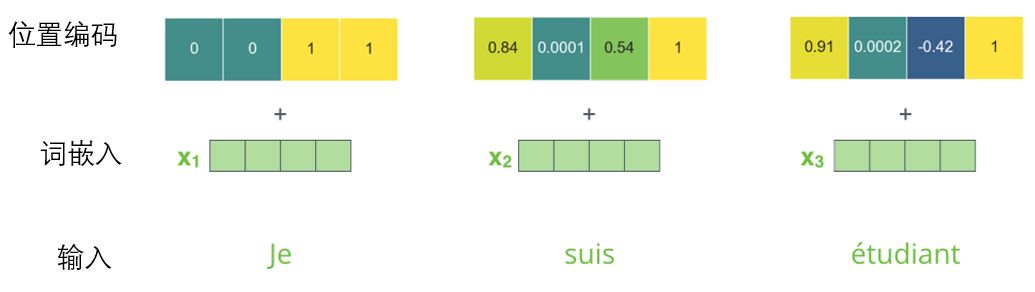
这左半部分的值由一个函数(使用正弦)生成,而右半部分由另一个函数(使用余弦)生成。然后将它们拼在一起而得到每一个位置编码向量。原始论文里描述了位置编码的公式,这不是唯一可能的位置编码方法,然而,它的优点是能够扩展到未知的序列长度。
2.3 残差模块
在每个编码器中的每个子层(自注意力、前馈网络)的周围都有一个残差连接,并且都跟随着一个“层-归一化”步骤。
![]()
如果我们去可视化这些向量以及这个和自注意力相关联的层-归一化操作,那么看起来就像下面这张图描述一样:
解码器的子层也是这样样的。如果我们想象一个2 层编码-解码结构的transformer,它看起来会像下面这张图一样:
![]()
3. 多头注意力机制
1.它扩展了模型专注于不同位置的能力。在上面的例子中,虽然每个编码都在z1中有或多或少的体现,但是它可能被实际的单词本身所支配。如果我们翻译一个句子,比如“The animal didn’t cross the street because it was too tired”,我们会想知道“it”指的是哪个词,这时模型的“多头”注意机制会起到作用。
2.它给出了注意力层的多个“表示子空间”(representation subspaces)。接下来我们将看到,对于“多头”注意机制,我们有多个查询/键/值权重矩阵集(Transformer使用八个注意力头,因此我们对于每个编码器/解码器有八个矩阵集合)。这些集合中的每一个都是随机初始化的,在训练之后,每个集合都被用来将输入词嵌入(或来自较低编码器/解码器的向量)投影到不同的表示子空间中。
在“多头”注意机制下,为每个头保持独立的查询/键/值权重矩阵,从而产生不同的查询/键/值矩阵。和之前一样,我们拿X乘以WQ/WK/WV矩阵来产生查询/键/值矩阵。

前馈层不需要8个矩阵,它只需要一个矩阵(由每一个单词的表示向量组成)。所以我们需要一种方法把这八个矩阵压缩成一个矩阵。那该怎么做?其实可以直接把这些矩阵拼接在一起,然后用一个附加的权重矩阵WO与它们相乘。

把所有步骤集中在一个图片中:

4. Transfromer
4.1注意力层
注意力函数可以描述为将一个查询和一组键值对映射到一个输出,其中查询、键、值和输出都是向量。 输出计算为值的加权总和,其中分配给每个值的权重由Q与相应的K计算得来。
4.2 encoder与decoder
encoder
编码器由 N = 6 个相同层的堆栈组成。 每层有两个子层。 第一个是多头自注意力机制,第二个是全连接前馈网络。 我们在两个子层的每一个周围都使用了一个残差连接,然后是层归一化 。 即每个子层的输出是LayerNorm(x + Sublayer(x))。
decoder
编码器通过处理输入序列开启工作。顶端编码器的输出之后会变转化为一个包含向量K(键向量)和V(值向量)的注意力向量集 。这些向量将被每个解码器用于自身的“编码-解码注意力层”,而这些层可以帮助解码器关注输入序列哪些位置合适。
解码阶段的每个步骤都会输出一个输出序列,接下来的步骤重复了这个过程,直到到达一个特殊的终止符号,它表示transformer的解码器已经完成了它的输出。每个步骤的输出在下一个时间步被提供给底端解码器,并且就像编码器之前做的那样,这些解码器会输出它们的解码结果 。另外,就像我们对编码器的输入所做的那样,我们会嵌入并添加位置编码给那些解码器,来表示每个单词的位置。
这个“编码-解码注意力层”工作方式基本就像多头自注意力层一样,只不过它是通过在它下面的层来创造查询矩阵,并且从编码器的输出中取得键/值矩阵。
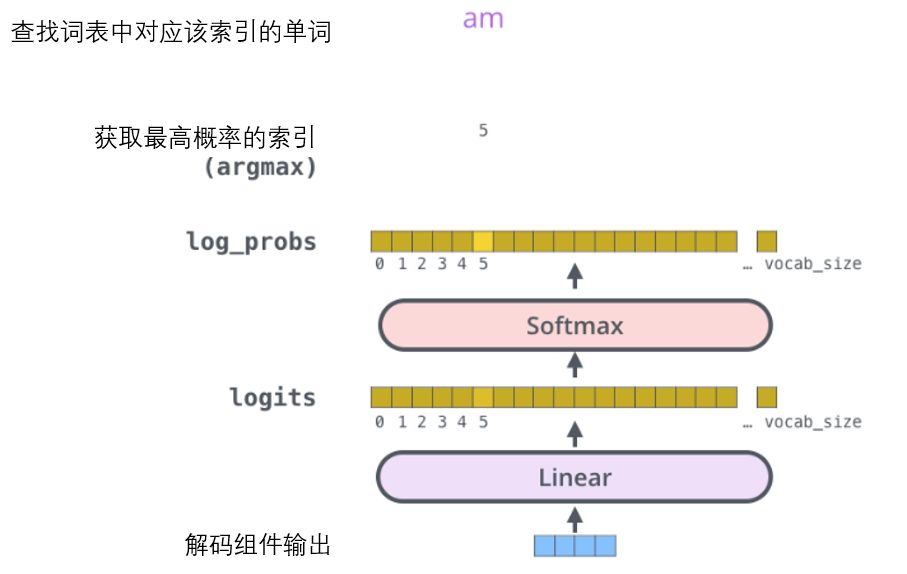
4.3 线性变换和Softmax层
解码组件最后会输出一个实数向量。我们如何把浮点数变成一个单词?这便是线性变换层要做的工作,它之后就是Softmax层。线性变换层是一个简单的全连接神经网络,它可以把解码组件产生的向量投射到一个比它大得多的、被称作对数几率(logits)的向量里。
不妨假设我们的模型从训练集中学习一万个不同的英语单词(我们模型的“输出词表”)。因此对数几率向量为一万个单元格长度的向量——每个单元格对应某一个单词的分数。接下来的Softmax 层便会把那些分数变成概率,通过argmax函数,概率最高的单元格被选中,并且它对应的单词被作为这个时间步的输出。
4.4 损失函数
由于模型的参数(权重)都是随机初始化的,因此(未经训练的)模型会为每个单元格/单词生成具有任意值的概率分布。 我们可以将其与实际输出进行比较,然后使用反向传播调整所有模型的权重,使输出更接近所需的输出。一般使用交叉熵作为比较概率分布的损失函数。
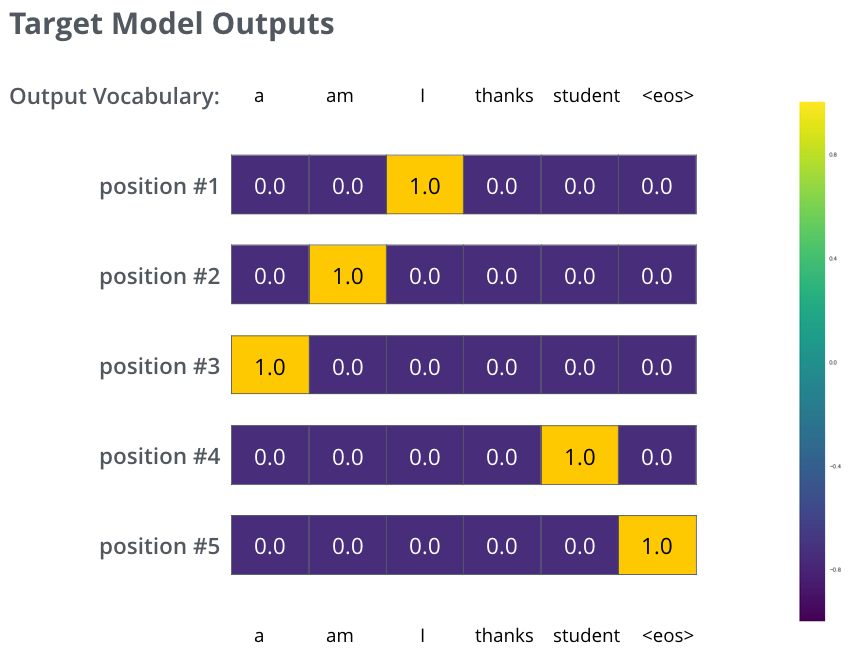
例如,输入“je suis étudiant”并期望输出是“i am a student”。那我们就希望我们的模型能够成功地在这些情况下输出概率分布:
每个概率分布被一个以词表大小(我们的例子里是6,但现实情况通常是3000或10000)为宽度的向量所代表。
第一个概率分布在与“i”关联的单元格有最高的概率
第二个概率分布在与“am”关联的单元格有最高的概率
以此类推,第五个输出的分布表示“”关联的单元格有最高的概率
5.时空注意力机制
6. Attention机制的应用
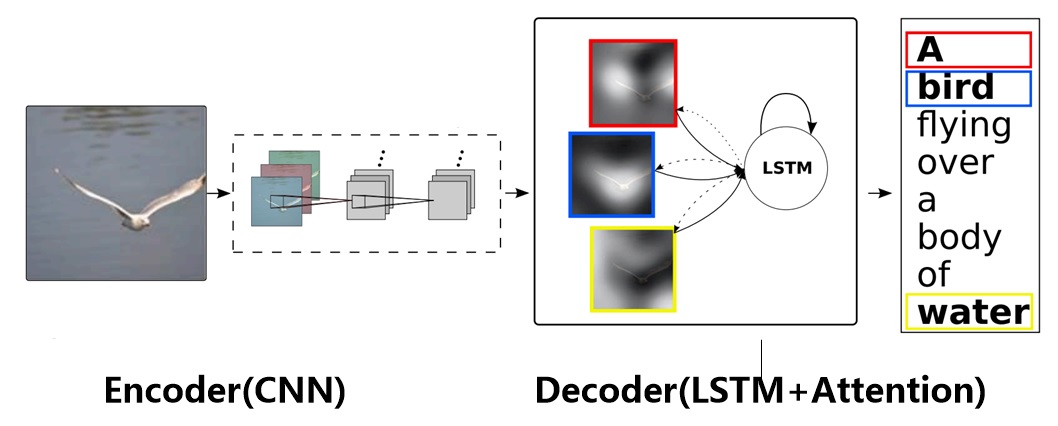
图片描述(Image-Caption)是一种典型的图文结合的深度学习应用,输入一张图片,人工智能系统输出一句描述句子,语义等价地描述图片所示内容。很明显这种应用场景也可以使用Encoder-Decoder框架来解决任务目标,此时Encoder输入部分是一张图片,一般会用CNN来对图片进行特征抽取,Decoder部分使用RNN或者LSTM来输出自然语言句子。
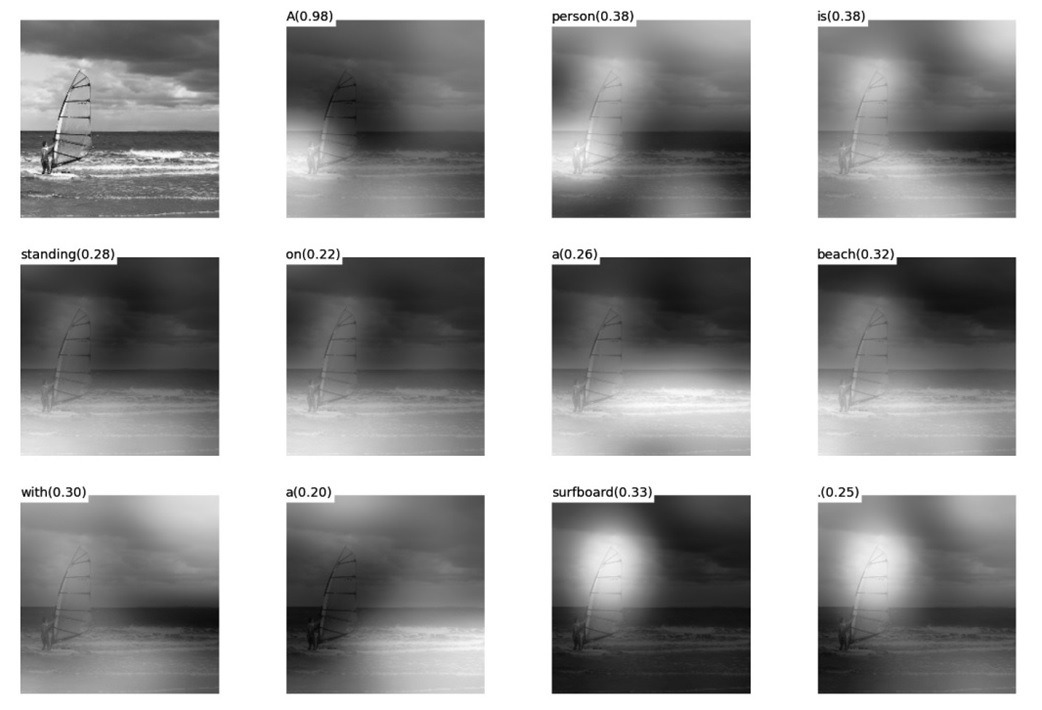
Attention模型在这里起到了类似人类视觉选择性注意的机制,在输出某个实体单词的时候会将注意力焦点聚焦在图片中相应的区域上。下图给出了根据给定图片生成句子“A person is standing on a beach with a surfboard.”过程时每个单词对应图片中的注意力聚焦区域。
注意力机制应用领域
1.序列到序列
本质上任何东西都可以转化为广义序列,如视频、图片(分成patch)。
1.1 机器翻译
1.2 bert
BERT(Bidirectional Encoder Representations from Transformers),作为一个Word2Vec的替代者,其在NLP领域的11个方向大幅刷新了精度。
word embedding:将高维稀疏表示映射到低维稠密表示,低维表示更能代表词语之间的关系,这种词嵌入表示是根据大量的文本训练出来的。
BERT的本质上是通过在海量的语料的基础上运行自监督学习方法为单词学习一个好的特征表示,所谓自监督学习是指在没有人工标注的数据上运行的监督学习。在以后特定的NLP任务中,我们可以直接使用BERT的特征表示作为该任务的词嵌入特征。所以BERT提供的是一个供其它任务迁移学习的模型,该模型可以根据任务微调或者固定之后作为特征提取器。BERT的源码和模型10月31号已经在Github上开源
1.3 对联生成
1.4 聊天机器人
1.5 摘要生成
1.6 文章生成
2.图片到序列
2.1 图片到文本
字幕生成
。。。
2.2 ViT-图像分类
部署在本机base环境,代码地址(与原文地址不一致):https://github.com/lucidrains/vit-pytorch,包含vit及一系列变体
2020 年 10 月,谷歌提出了Vision Transformer (ViT),可以直接利用 transformer 对图像进行分类,而不需要卷积网络。ViT 模型取得了与当前最优卷积网络相媲美的结果,但其训练所需的计算资源大大减少。
论文:TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE
Timersfromer 论文:Is Space-Time Attention All Y ou Need for Video Understanding?
将ViT应用于视频分类,直接从一系列帧级patch中实现时空特征学习。
将视频视为一系列帧。与ViT一样,每帧都被线性映射到一个嵌入中,并用位置信息进行扩充。将得到的向量序列类比为词嵌入,类似于从NLP中处理,将结果送到Transformer编码器。
标准Transformer中自我关注的一个缺点是,它需要计算所有标记对的相似性度量。由于视频中有大量补丁,这在计算上很昂贵。为了应对这些挑战,提出了几个在时空体上可扩展的自我注意设计,并在大规模动作分类数据集上对它们进行了实证评估。在提出的方案中,最佳设计由“分散注意力”架构表示,该架构在网络的每个块内分别应用时间注意力和空间注意力。
2.3 Timesformer—视频行为分类
注意:pytorch版本改为1.7.0

 浙公网安备 33010602011771号
浙公网安备 33010602011771号