【视觉SLAM十四讲-个人笔记】初识SLAM
 视觉SLAM十四讲这本书应该算是非常好理解的一本书了,而且讲的十分到位,不仅可以学习视觉SLAM的知识,对于一些工程上的设计也对我有启发。这里不会讲解视觉SLAM的内容,只是进行一些小总结与提炼,以及读后感。
视觉SLAM十四讲这本书应该算是非常好理解的一本书了,而且讲的十分到位,不仅可以学习视觉SLAM的知识,对于一些工程上的设计也对我有启发。这里不会讲解视觉SLAM的内容,只是进行一些小总结与提炼,以及读后感。
视觉SLAM十四讲这本书应该算是非常好理解的一本书了,而且讲的十分到位,不仅可以学习视觉SLAM的知识,对于一些工程上的设计也对我有启发。这里不会讲解视觉SLAM的内容,只是进行一些小总结与提炼,以及读后感。
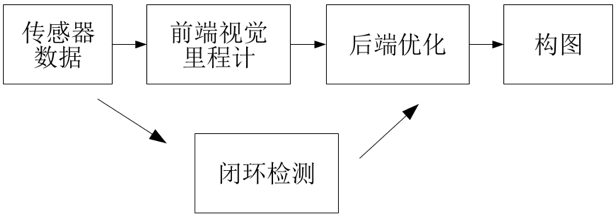
经典视觉SLAM框架
SLAM数学模型
\[\begin{cases}
x_k=f(x_{k-1},u_k,\omega_k)\\
z_{k,j}=h(y_j,x_k,v_{k,j})
\end{cases}
\]
其中:\(x\)代表位置,\(u\)代表运动传感器的数据或者控制器的输入参数,\(z\)是一个观测数据,\(y\)是路标,\(\omega,v\)是噪声,

 浙公网安备 33010602011771号
浙公网安备 33010602011771号