转载:【AI系统】MobileFormer
在本文中,将介绍一种新的网络-MobileFormer,它实现了 Transformer 全局特征与 CNN 局部特征的融合,在较低的成本内,创造一个高效的网络。通过本文,让大家去了解如何将 CNN 与 Transformer 更好的结合起来,同时实现模型的轻量化。
MobileFormer
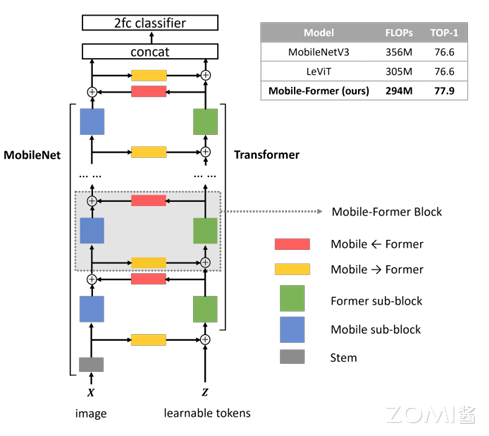
MobileFormer:一种通过双线桥将 MobileNet 和 Transformer 并行的结构。这种方式融合了 MobileNet 局部性表达能力和 Transformer 全局表达能力的优点,这个桥能将局部性和全局性双向融合。和现有 Transformer 不同,Mobile-Former 使用很少的 tokens(例如 6 个或者更少)随机初始化学习全局先验,计算量更小。
并行结构
Mobile-Former 将 MobileNet 和 Transformer 并行化,并通过双向交叉注意力连接(下见图)。Mobile(指 MobileNet)采用图像作为输入($X\in R^{HW \times 3}$),并应用反向瓶颈块提取局部特征。Former(指 Transformers)将可学习的参数(或 tokens)作为输入,表示为 $Z\in R^{M\times d}$,其中 M 和 d 分别是 tokens 的数量和维度,这些 tokens 随机初始化。与视觉 Transformer(ViT)不同,其中 tokens 将局部图像 patch 线性化,Former 的 tokens 明显较少(M≤6),每个代表图像的全局先验知识。这使得计算成本大大降低。
低成本双线桥
Mobile 和 Former 通过双线桥将局部和全局特征双向融合。这两个方向分别表示为 Mobile→Former 和 Mobile←Former。我们提出了一种轻量级的交叉注意力模型,其中映射($W{Q}$,$W$,$W^{V}$)从 Mobile 中移除,以节省计算,但在 Former 中保留。在通道数较少的 Mobile 瓶颈处计算交叉注意力。具体而言,从局部特征图 X 到全局 tokens Z 的轻量级交叉注意力计算如下:
$$
A_{X->Z} = [Attn(\widetilde{z_{i}}W_{i}{Q},\widetilde{x_{i}},\widetilde{x_{i}})]_{i=1:h}W\tag{1}
$$
其中局部特征 X 和全局 tokens Z 被拆分进入 h 个头,即 $X=[\widetilde{x_{1}}...\widetilde{x_{h}}],Z=[\widetilde{z_{1}}...\widetilde{z_{h}}]$ 表示多头注意力。第 i 个头的拆分 $\widetilde{z_{1}}\in R^{M \times \frac {d}{h} }$ 与第 i 个 token$\widetilde{z_{1}}\in R^{d}$ 不同。$W_{i}^{Q}$ 是第 i 个头的查询映射矩阵。$W^{O}$ 用于将多个头组合在一起。Attn(Q,K,V)是查询 Q、键 K 和值 V 的标准注意力函数,即:
$$
softmax(\frac{QK^{T}}{\sqrt{d_{k}}})
$$
其中 $[.]{1:h}$ 表示将 h 个元素 concat 到一起。需要注意的是,键和值的映射矩阵从 Mobile 中移除,而查询的映射矩阵 $W^{Q}$ 在 Former 中保留。类似地从全局到局部的交叉注意力计算如下:
$$
A_{Z->X} = [Attn(\widetilde{x_{i}},\widetilde{z_{i}}\odot W_{i}^{K},\widetilde{z_{i}}\odot W_{i}^{V})]_{i=1:h}\tag{2}
$$
其中 $W_{i}^{K}$ 和 $W_{i}^{V}$ 分别是 Former 中键和值的映射矩阵。而查询的映射矩阵从 Mobile 中移除。
Mobile-Former 块
Mobile-Former 由 Mobile-Former 块组成。每个块包含四部分:Mobile 子块、Former 子块以及双向交叉注意力 Mobile←Former 和 Mobile→Former(如下图所示)。
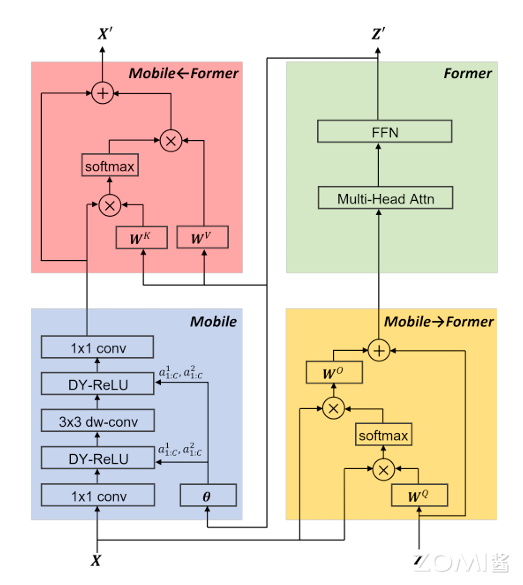
输入和输出:Mobile-Former 块有两个输入:(a) 局部特征图 $X\in R^{HW\times C}$,为 C 通道、高度 H 和宽度 W,以及(b) 全局 tokens $Z\in R^{M\times d}$,其中 M 和 d 是分别是 tokens 的数量和维度,M 和 d 在所有块中一样。Mobile-Former 块输出更新的局部特征图 $X$ 和全局 tokens$Z$,用作下一个块的输入。
Mobile 子块:如上图所示,Mobile 子块将特征图 $X$ 作为输入,并将其输出作为 Mobile←Former 的输入。这和反向瓶颈块略有不同,其用动态 ReLU 替换 ReLU 作为激活函数。不同于原始的动态 ReLU,在平均池化特征图上应用两个 MLP 以生成参数。我们从 Former 的第一个全局 tokens 的输出 $z'_{1}$ 应用两个 MLP 层(上图中的θ)保存平均池化。其中所有块的 depth-wise 卷积的核大小为 3×3。
class Mobile(nn.Module):
def __init__(self, in_channel, expand_size, out_channel, token_demension, kernel_size=3, stride=1, k=2):
super(Mobile, self).__init__()
self.in_channel, self.expand_size, self.out_channel = in_channel, expand_size, out_channel
self.token_demension, self.kernel_size, self.stride, self.k = token_demension, kernel_size, stride, k
if stride == 2:
self.strided_conv = nn.Sequential(
nn.Conv2d(self.in_channel, self.expand_size, kernel_size=3, stride=2, padding=int(self.kernel_size // 2), groups=self.in_channel).cuda(),
nn.BatchNorm2d(self.expand_size).cuda(),
nn.ReLU6(inplace=True).cuda()
)
self.conv1 = nn.Conv2d(self.expand_size, self.in_channel, kernel_size=1, stride=1).cuda()
self.bn1 = nn.BatchNorm2d(self.in_channel).cuda()
self.ac1 = DynamicReLU(self.in_channel, self.token_demension, k=self.k).cuda()
self.conv2 = nn.Conv2d(self.in_channel, self.expand_size, kernel_size=3, stride=1, padding=1, groups=self.in_channel).cuda()
self.bn2 = nn.BatchNorm2d(self.expand_size).cuda()
self.ac2 = DynamicReLU(self.expand_size, self.token_demension, k=self.k).cuda()
self.conv3 = nn.Conv2d(self.expand_size, self.out_channel, kernel_size=1, stride=1).cuda()
self.bn3 = nn.BatchNorm2d(self.out_channel).cuda()
else:
self.conv1 = nn.Conv2d(self.in_channel, self.expand_size, kernel_size=1, stride=1).cuda()
self.bn1 = nn.BatchNorm2d(self.expand_size).cuda()
self.ac1 = DynamicReLU(self.expand_size, self.token_demension, k=self.k).cuda()
self.conv2 = nn.Conv2d(self.expand_size, self.expand_size, kernel_size=3, stride=1, padding=1, groups=self.expand_size).cuda()
self.bn2 = nn.BatchNorm2d(self.expand_size).cuda()
self.ac2 = DynamicReLU(self.expand_size, self.token_demension, k=self.k).cuda()
self.conv3 = nn.Conv2d(self.expand_size, self.out_channel, kernel_size=1, stride=1).cuda()
self.bn3 = nn.BatchNorm2d(self.out_channel).cuda()
def forward(self, x, first_token):
if self.stride == 2:
x = self.strided_conv(x)
x = self.bn1(self.conv1(x))
x = self.ac1(x, first_token)
x = self.bn2(self.conv2(x))
x = self.ac2(x, first_token)
return self.bn3(self.conv3(x))
Former 子块:Former 子块是一个标准的 Transformer 块,包括一个多头注意力(MHA)和一个前馈网络(FFN)。在 FFN 中,膨胀率为 2(代替 4)。使用 post 层归一化。Former 在 Mobile→Former 和 Mobile←Former 之间处理(见上图)。
class Former(nn.Module):
def __init__(self, head, d_model, expand_ratio=2):
super(Former, self).__init__()
self.d_model = d_model
self.expand_ratio = expand_ratio
self.eps = 1e-10
self.head = head
assert self.d_model % self.head == 0
self.d_per_head = self.d_model // self.head
self.QVK = MLP([self.d_model, self.d_model * 3], bn=False).cuda()
self.Q_to_heads = MLP([self.d_model, self.d_model], bn=False).cuda()
self.K_to_heads = MLP([self.d_model, self.d_model], bn=False).cuda()
self.V_to_heads = MLP([self.d_model, self.d_model], bn=False).cuda()
self.heads_to_o = MLP([self.d_model, self.d_model], bn=False).cuda()
self.norm = nn.LayerNorm(self.d_model).cuda()
self.mlp = MLP([self.d_model, self.expand_ratio * self.d_model, self.d_model], bn=False).cuda()
self.mlp_norm = nn.LayerNorm(self.d_model).cuda()
def forward(self, x):
QVK = self.QVK(x)
Q = QVK[:, :, 0: self.d_model]
Q = rearrange(self.Q_to_heads(Q), 'n m ( d h ) -> n m d h', h=self.head)
K = QVK[:, :, self.d_model: 2 * self.d_model]
K = rearrange(self.K_to_heads(K), 'n m ( d h ) -> n m d h', h=self.head)
V = QVK[:, :, 2 * self.d_model: 3 * self.d_model]
V = rearrange(self.V_to_heads(V), 'n m ( d h ) -> n m d h', h=self.head)
scores = torch.einsum('nqdh, nkdh -> nhqk', Q, K) / (np.sqrt(self.d_per_head) + self.eps)
scores_map = F.softmax(scores, dim=-1)
v_heads = torch.einsum('nkdh, nhqk -> nhqd', V, scores_map)
v_heads = rearrange(v_heads, 'n h q d -> n q ( h d )')
attout = self.heads_to_o(v_heads)
attout = self.norm(attout)
attout = self.mlp(attout)
attout = self.mlp_norm(attout)
return attout
Mobile→Former:文章提出的轻量级交叉注意力(式 1)用于将局部特征 X 融合到全局特征 tokens Z。与标准注意力相比,映射矩阵的键 $W^{K}$ 和值 $W^{V}$(在局部特征 X 上)被移除以节省计算(见上图)。
class Mobile_Former(nn.Module):
'''局部特征 -> 全局特征'''
def __init__(self, d_model, in_channel):
super(Mobile_Former, self).__init__()
self.d_model, self.in_channel = d_model, in_channel
self.project_Q = nn.Linear(self.d_model, self.in_channel).cuda()
self.unproject = nn.Linear(self.in_channel, self.d_model).cuda()
self.eps = 1e-10
self.shortcut = nn.Sequential().cuda()
def forward(self, local_feature, x):
_, c, _, _ = local_feature.shape
local_feature = rearrange(local_feature, 'n c h w -> n ( h w ) c')
project_Q = self.project_Q(x)
scores = torch.einsum('nmc , nlc -> nml', project_Q, local_feature) * (c ** -0.5)
scores_map = F.softmax(scores, dim=-1)
fushion = torch.einsum('nml, nlc -> nmc', scores_map, local_feature)
unproject = self.unproject(fushion)
return unproject + self.shortcut(x)
Mobile-Former:这里的交叉注意力(式 2)与 Mobile→Former 的方向相反,其将全局 tokens 融入本地特征。局部特征是查询,全局 tokens 是键和值。因此,我们保留键 $W^{K}$ 和值 $W^{V}$ 中的映射矩阵,但移除查询 $W^{Q}$ 的映射矩阵以节省计算,如上图所示。
计算复杂度:Mobile-Former 块的四个核心部分具有不同的计算成本。给定输入大小为 $HW\times C$ 的特征图,以及尺寸为 d 的 M 个全局 tokens,Mobile 占据了大部分的计算量 $O(HWC^{2})$。Former 和双线桥是重量级的,占据不到总计算成本的 20%。具体而言,Former 的自注意力和 FFN 具有复杂度 $O(M{2}d+Md)$。Mobile→Former 和 Mobile←Former 共享交叉注意力的复杂度 $O(MHWC+MdC)$。
class Former_Mobile(nn.Module):
'''全局特征 -> 局部特征'''
def __init__(self, d_model, in_channel):
super(Former_Mobile, self).__init__()
self.d_model, self.in_channel = d_model, in_channel
self.project_KV = MLP([self.d_model, 2 * self.in_channel], bn=False).cuda()
self.shortcut = nn.Sequential().cuda()
def forward(self, x, global_feature):
res = self.shortcut(x)
n, c, h, w = x.shape
project_kv = self.project_KV(global_feature)
K = project_kv[:, :, 0 : c]
V = project_kv[:, :, c : ]
x = rearrange(x, 'n c h w -> n ( h w ) c')
scores = torch.einsum('nqc, nkc -> nqk', x, K)
scores_map = F.softmax(scores, dim=-1)
v_agg = torch.einsum('nqk, nkc -> nqc', scores_map, V)
feature = rearrange(v_agg, 'n ( h w ) c -> n c h w', h=h)
return feature + res
网络结构
一个 Mobile-Former 架构,图像大小为 224×224,294M FLOPs,以不同的输入分辨率堆叠 11 个 Mobile-Former 块。所有块都有 6 个维度为 192 的全局 tokens。它以一个 3×3 的卷积作为 stem 和第一阶段的轻量瓶颈块,首先膨胀,然后通过 3×3 depth-wise 卷积和 point-wise 卷积压缩通道数。第 2-5 阶段包括 Mobile-Former 块。每个阶段的下采样,表示为 Mobile-Former 分类头在局部特征应用平均池化,首先和全局 tokens concat 到一起,然后经过两个全连接层,中间是 h-swish 激活函数。Mobile-Former 有七种模型,计算成本从 26M 到 508M FLOPs。它们的结构相似,但宽度和高度不同。
class MobileFormerBlock(nn.Module):
def __init__(self, in_channel, expand_size, out_channel, d_model, stride=1, k=2, head=8, expand_ratio=2):
super(MobileFormerBlock, self).__init__()
self.in_channel, self.expand_size, self.out_channel = in_channel, expand_size, out_channel
self.d_model, self.stride, self.k, self.head, self.expand_ratio = d_model, stride, k, head, expand_ratio
self.mobile = Mobile(self.in_channel, self.expand_size, self.out_channel, self.d_model, kernel_size=3, stride=self.stride, k=self.k).cuda()
self.former = Former(self.head, self.d_model, expand_ratio=self.expand_ratio).cuda()
self.mobile_former = Mobile_Former(self.d_model, self.in_channel).cuda()
self.former_mobile = Former_Mobile(self.d_model, self.out_channel).cuda()
def forward(self, local_feature, global_feature):
z_hidden = self.mobile_former(local_feature, global_feature)
z_out = self.former(z_hidden)
x_hidden = self.mobile(local_feature, z_out[:, 0, :])
x_out = self.former_mobile(x_hidden, z_out)
return x_out, z_out
如果您想了解更多AI知识,与AI专业人士交流,请立即访问昇腾社区官方网站https://www.hiascend.com/或者深入研读《AI系统:原理与架构》一书,这里汇聚了海量的AI学习资源和实践课程,为您的AI技术成长提供强劲动力。不仅如此,您还有机会投身于全国昇腾AI创新大赛和昇腾AI开发者创享日等盛事,发现AI世界的无限奥秘~
转载自:https://www.cnblogs.com/ZOMI/articles/18561193

 浙公网安备 33010602011771号
浙公网安备 33010602011771号