#include "stm32f10x.h"
void PWM_Init(void)
{
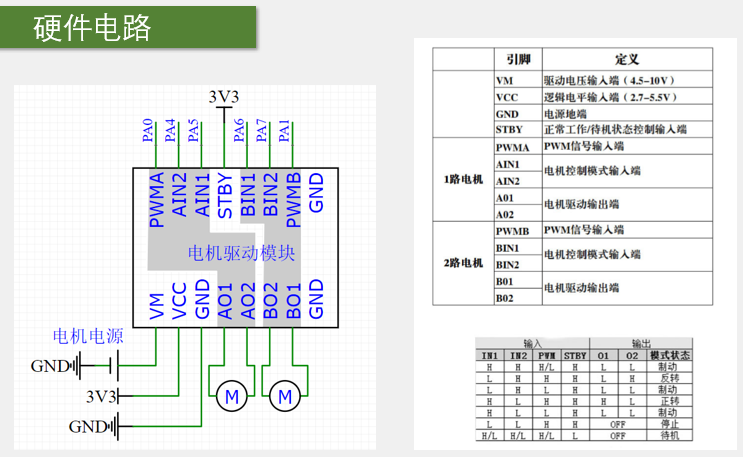
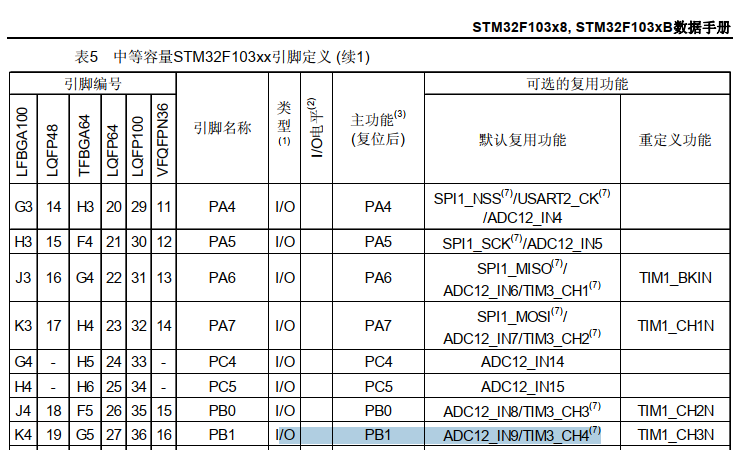
//PB1默认TIM3_CH4通道
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//配置PB1为复用推挽输出
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出,中断控制来自片上外设(TIM3_CH3),而非输出数据寄存器
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//设置TIM3定时器内部时钟源
TIM_InternalClockConfig(TIM3);
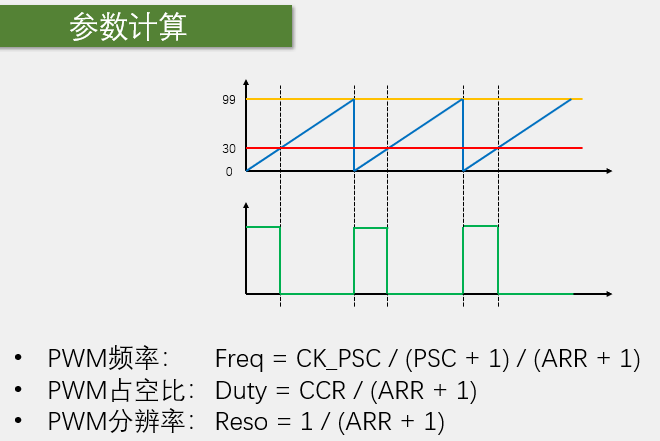
//频率2kHz,占空比100%
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
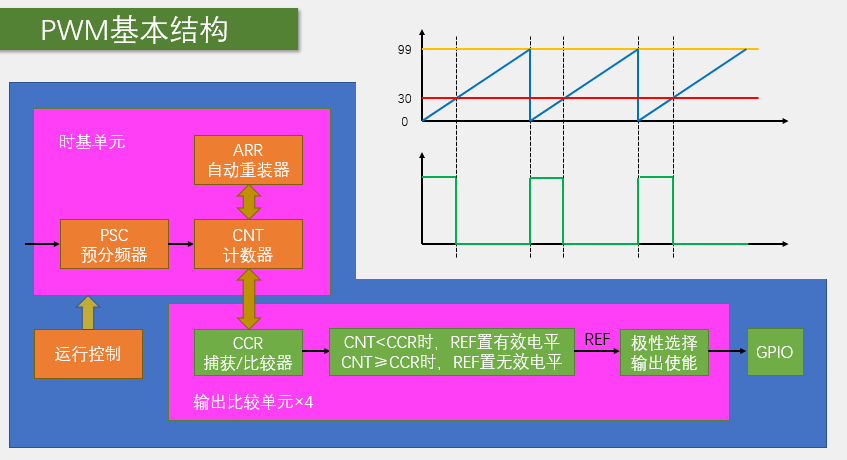
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 36 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//清除更新标志位
TIM_ClearFlag(TIM3, TIM_FLAG_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); //TIM3中断配置使能
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋初始值
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出比较模式
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //极性选择
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //初始值设CCR为0
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
//打开TIM3定时器外设
TIM_Cmd(TIM3, ENABLE);
}
//PWM占空比的函数
void PWM_SetCompare4(uint16_t Compare4)
{
TIM_SetCompare4(TIM3, Compare4); //设置CCR值
}