步进电机
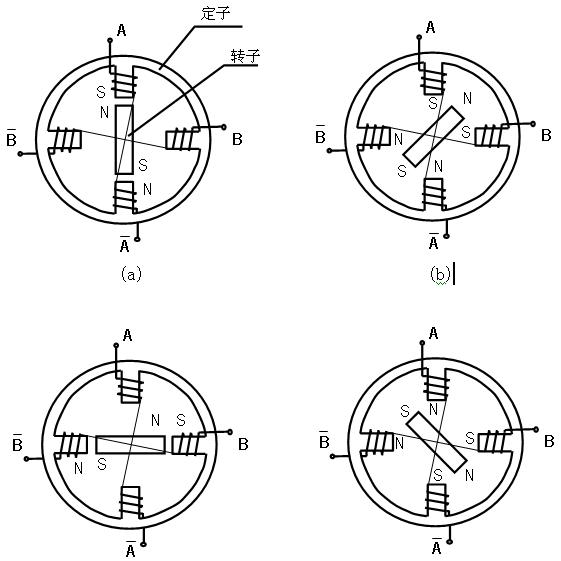
内部结构
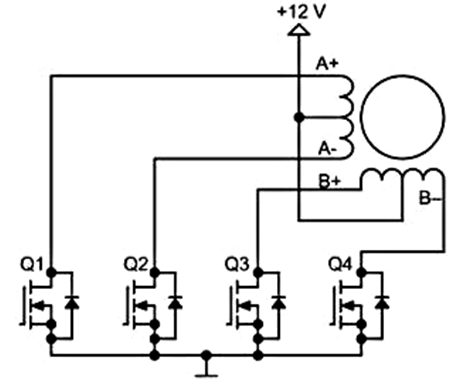
典型驱动电路
3个驱动顺序方法
步进电机控制通常采用双向驱动电流,其电机步进由按顺序切换绕组来实现。
1.单相全步进驱动
同一时刻只有一个线圈导通。
励磁顺序为A→B→C→D→A(正转)
消耗电力小,精确度良好,但转矩小,振动较大,每送一励磁信号可走18度。
2.双相全步进驱动:
同一时刻有二个线圈同时导通。
励磁顺序为AB→BC→CD→DA→AB(正转)
因其转矩大,振动小,故为目前使用最多的励磁方式,每送一励磁信号可走18度。
在这种模式中,双相一起加电,因此,转子总是在两个极之间。
3.半步进模式:
将单相步进和双相步进结合在一起加电:单相加电,然后双相加电,然后单相加电…,因此,电机以半步进增量运转。
励磁顺序为A→AB→B→BC→C→CD→D→DA→A(正转)
每送一励磁信号可走9度,分辨率提且运转平滑,亦被广泛采用。
电机每个励磁的有效步距角减少了一半,其输出的扭矩也较低。
方向
为使步进电动机反转,只要将励磁信号反向传送即可。
正转 A→B→C→D→A
反转 A→D→C→B→A
调速
通过改变步进电机的通电脉冲的频率,可以达到调速的目的。
51单片机控制步进电机Protues仿真设计_proteus步进电机-CSDN博客
详解4线6线步进电机,单极性/双极性驱动-百度经验 (baidu.com)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号