
机械师实时调度示例(I) - 实时规划
OptaPlanner创办人Geoffrey De Smet及其团队,在Red Hat 技术峰会上主题会场上,演示了一个通过OptaPlanner实现实时规划与调度的示例。Geoffrey及其团队专门为此分三篇博文描述了该程序。该程序及其相关博文是OptaPlanner在VRP领域极之经典之作。本系列也分三篇对博文进行翻译,以飨各位ORer, APSer和Planner.
目前本人正在研究该程序,未来将会进一步对该程序作更深入的分析,并形成博文,分享其中奥妙。
【以下为译文】
今年,我和我的团队在Red Hat技术峰会上作了主旨演讲。在7000人面前,我们演示了一个实时调度程序,该程序可以实现对现场观众通过手机App的输入进行实时反应。在过去两个月里,我们的团队和其它中间件的团队一起协同,在Burr Sutter的出色指导下,创建了这个实时调度程序。这个程序集成了多种技术,例如Android/iPhone的加速感应器,还有OpenShift / Kubernetes, Quarkus, KNative, TensorFlow, Kafka/Strimzi, Camel, Node.js, Godot, Infinispan, Drools等,当然少不了主角OptaPlanner.
我们写了一个模拟器,模拟一个典型的地板生产场景,场景中涉及装配线上的机械。当我第一次向我和妻子展示这个程序时,引发了一个有趣的对话:
"看,亲爱的,这是在主旨演讲上的示例程序,我们过去两周时间一直在努力(构建它)"
"看起来像小游戏,那些是Mario和Luigi在到处跑吗?"
"注意,(这些是机器维修师)它演示了OptaPlanner是如何优化他们的行走时间,使他们可以花更多的时候在维修机械上。"
"你打算就把这玩艺展示给7000多个商务客呀?"
"当然,展示将会非常精彩."
程序运行的效率如下:
现有10台机器(编号从A到J)运行过程中会出现磨损,并通过传感器检查发现磨损情况。(现场观众安装和我们的APP)在现场观众的帮忙下,我们通过获取他们手机上的加速感应器的数据,来模拟传感器。正所谓当事物变得越摇摇欲坠时,它就变更脆弱。当观众拼命摇晃,或用手机做出其它晃动的动作时,程序中对应的机器就会收到损坏信息。(由于人数众多),现场的每一部分观众通过晃动手机,就会向对应的一台机器发送损害信息为,对应机器的健康值就会减少。如果有一台机器的健康值降到0,那就表示这台机器崩溃了。
此时,那些受损的机器在它们崩溃之前安排维修,这就是OptaPlanner用武之地了。程序中有2到3名机械师来修复这些受损的机器,与机械师们在机器之间穿梭,及在修复机器的同时,所有机器都在持续地降低健康值(现场观众正在持续拼命地晃动他们的手机)。在安排机器时工作时,决定各个机器的维修次序是很困难的,因为损坏无时无刻地发生着。幸亏,OptaPlanner为帮我们调度这些机械师,它会实时地对机台健康的变化作出反映,如视频所示:
(下面讨论一下规划程序的具体设计)
这个规划问题的挑战
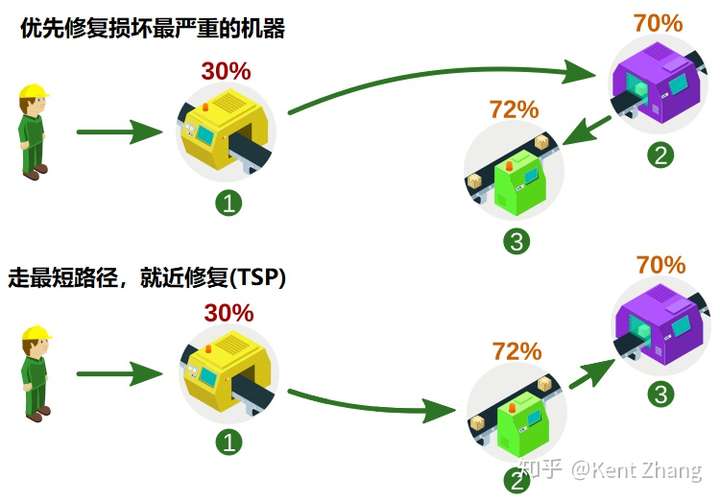
划目标只有一个:不能让做任意一个机台的健康值掉到0%。这看起来是一个简单的约束,但事实上它存在两个冲突的约束:
- 优先修复健康值最低的机器,因为最低健康值的机器,其崩溃的风险最高。
- 通过让机械师走最短的穿梭路径,让机械师尽量快的时间修复就近的机器 。原因如下:
- 机器时需要进行修复机器之外,还需要在机器之间到处到动,通过减少他们的穿梭时间,提高他们的生产力。
- 若只考虑最短路径一个约束,这就是一个TSP问题(旅行商问题)。
上述两个约束存在竞争的,它们各自会偏向输出以下不同的解决方案:
这两种约束对完成时间的影响差别不太明显,即如何影响机械师一次修复所有有故障机器的所需时间。维修的时间越长,将会降低生产力:
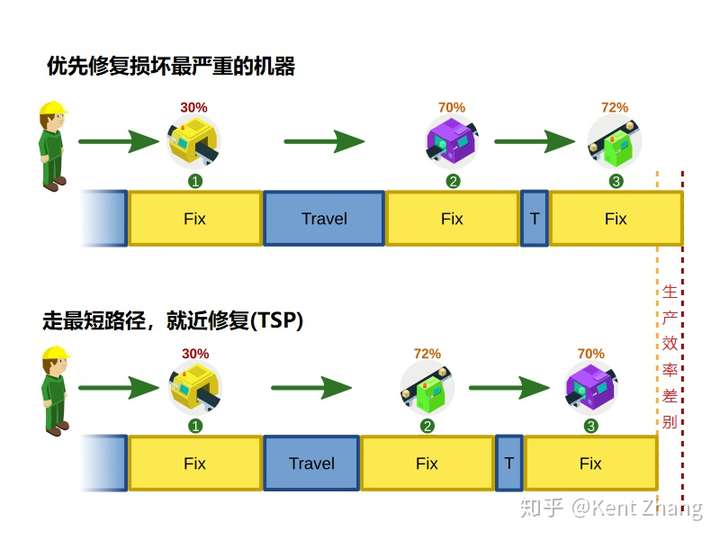
因此,我们最终需要权衡这两种约束。我们通过对每台损坏的机器评定惩罚性分数,将损坏量乘以持续时间,直到该机器被修复为止。因此,OptaPlanner规划出来的方案中,将会尽可能地避免让机器的损坏程度增大,或尽可能将机器处于损坏状态的时间减少。
这只是一个车辆路线规划问题(VRP)
在运筹学的学术界,此类问题也被称为车辆路线规则问题(Vehicle Routing Problem - VRP), 在该类问题中,我们需要一些车辆(例如货车)发送到多个目的地。
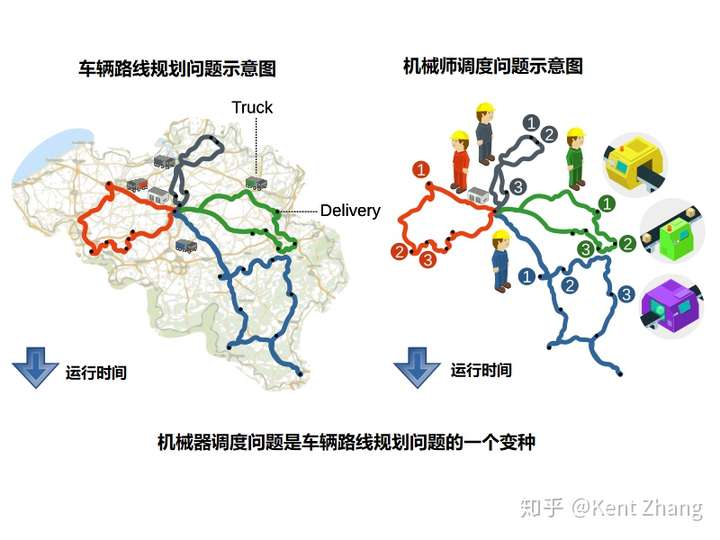
通过上图可以看出,这些只是存在一些约束差别的相同问题。
目前OptaPlanner确实擅长于求解车辆路线规划问题的优化:通过对整个车辆运行时间达到15%甚至更多的时间减少,我们每年为一些客户节省了数亿美元。同时也大大地减少了车辆的能源消耗,从而减少了碳排放,因此对环保也相当有益。
了解更多关于OptaPlanner在VRP问题的优化,或看一下Jiri(OptaPlanner项目另一位成员)在VRP问题的最新Demo,演示视频:
(机械师调度程序中)现实的挑战
首先,实现这种车辆路线规划的变种问题其实并不复杂,但要让程序的交互与演示运行得足够流畅,我们面临着更大的挑战。毕竟,我们不能冒着在演示期间,在观众与老板,包括我们的CEO Jim Whitehurst 面前程序崩溃的险。
如果想自己调度这个程序,可以从这里下载并根据readme的介绍进行调度。
End.
创作不易,欢迎转载,请标明出处。
本系列文章在公众号不定时连载,请关注公众号(让APS成为可能)及时接收,二维码:
如需了解更多关于OptaPlanner的应用,请发电邮致:kentbill@gmail.com
或到讨论组发表你的意见:https://groups.google.com/forum/#!forum/optaplanner-cn
若有需要可添加本人微信(13631823503)或QQ(12977379)实时沟通,但因本人日常工作繁忙,通过微信,QQ等工具可能无法深入沟通,较复杂的问题,建议以邮件或讨论组方式提出。(讨论组属于google邮件列表,国内网络可能较难访问,需自行解决)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号