游戏中的数学:矩阵
一个mxn矩阵是一个m行n列的矩形数组。矩阵中每一项叫做矩阵的元素(Element),行数和列数指定了矩阵的维数。下面是一个2×3矩阵的例子:
$\begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \end{bmatrix}$
矩阵可以通过(i, j)进行索引,i是行,j是列,一共2行3列,因此叫做2×3矩阵的原因(2×3也叫做矩阵的维度,Dimension)。
矩阵的下标从1开始,所以第一行和第一列都用数字1。这与C语言中以0作为数组下标起点有所不同,矩阵没有0行0列。
矩阵相等
两个矩阵维数相同,且对应的各个元素也相同,则这两个矩阵相等。如下$A$矩阵与$B$矩阵相等,即$A=B$:
$A = \begin{bmatrix} 1 & 5 \\ -2 & 3 \end{bmatrix}$,$B = \begin{bmatrix} 1 & 5 \\ -2 & 3 \end{bmatrix}$
矩阵转置
沿着矩阵$M$的对角线进行翻折,就得到其转置矩阵$M^{T} $。mxn向量经过转置(transpose)后变成nxm向量,原来的行变成列,原来的列变成行。如下:
$\begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \\ 10 & 11 & 12 \end{bmatrix} ^{T} = \begin{bmatrix} 1 & 4 & 7 & 10 \\ 2 & 5 & 8 & 11 \\ 3 & 6 & 9 & 12 \end{bmatrix}$
矩阵转置的性质
(1) 对于任意矩阵$M$,其转置的转置为其自身。即:$(M^{T})^{T} = M$
(2) 对于任意对角矩阵$D$,即:$D^{T}=D$
矩阵数乘
矩阵与标量之间的乘法也是矩阵的每一个元素分别乘以该标量
$\color{green}2 \cdot \begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} = \begin{bmatrix} \color{green}2 \cdot 1 & \color{green}2 \cdot 2 \\ \color{green}2 \cdot 3 & \color{green}2 \cdot 4 \end{bmatrix} = \begin{bmatrix} 2 & 4 \\ 6 & 8 \end{bmatrix}$
矩阵数乘的性质
(1) 交换律
$k\cdot M = M \cdot k$
(2) 结合率
$ k_1 \cdot (k_2 \cdot M)=(k_1 \cdot k_2) \cdot M $
(3) 分配律
$k\cdot (A + B) = k\cdot A + k\cdot B$
$( k_1+k_2)\cdot A = k_1\cdot A + k_2\cdot A$
(4) 转置
${(k \cdot M)}^{T} =k \cdot M^{T} $
矩阵加法
矩阵与矩阵之间的加法就是两个矩阵对应元素的加法运算。 注:两个矩阵需要维度相同
两个2×2矩阵相加:
$\begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} + \begin{bmatrix} 5 & 6 \\ 7 & 8 \end{bmatrix} = \begin{bmatrix} 1 + 5 & 2 + 6 \\ 3 + 7 & 4 + 8 \end{bmatrix} = \begin{bmatrix} 6 & 8 \\ {10} & {12} \end{bmatrix}$
数学上是没有矩阵与标量相加的运算的,但是很多矩阵c++库则支持矩阵与标量的加法。
具体做法是将标量转变成一个相同维度的矩阵,然后再与矩阵进行相加。
2×2矩阵与标量相加:
$\begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} + \color{green}3 = \begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} + \begin{bmatrix} \color{green}3 & \color{green}3 \\ \color{green}3 & \color{green}3 \end{bmatrix} = \begin{bmatrix} 1 + \color{green}3 & 2 + \color{green}3 \\ 3 + \color{green}3 & 4 + \color{green}3 \end{bmatrix} = \begin{bmatrix} 4 & 5 \\ 6 & 7 \end{bmatrix}$
矩阵加法的性质
(1) 交换律
$A+B=B+A$
(2) 结合律
$(A+B)+C=A+(B+C)$
(3) 转置
${(A+B)}^{T}=A^{T}+B^{T}$
矩阵减法
矩阵与矩阵之间的减法就是两个矩阵对应元素的减法运算。 注:两个矩阵需要维度相同
两个2×2矩阵相减:
$\begin{bmatrix} 4 & 2 \\ 1 & 6 \end{bmatrix} - \begin{bmatrix} 2 & 4 \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 4 - 2 & 2 - 4 \\ 1 - 0 & 6 - 1 \end{bmatrix} = \begin{bmatrix} 2 & -2 \\ 1 & 5 \end{bmatrix}$
与加法类似,矩阵与标量的减法的具体做法是将标量转变成一个相同维度的矩阵,然后再与矩阵进行相减。
2×2矩阵与标量相减:
$\begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} - \color{green}3 = \begin{bmatrix} 1 & 2 \\ 3 & 4 \end{bmatrix} - \begin{bmatrix} \color{green}3 & \color{green}3 \\ \color{green}3 & \color{green}3 \end{bmatrix} = \begin{bmatrix} 1 - \color{green}3 & 2 - \color{green}3 \\ 3 - \color{green}3 & 4 - \color{green}3 \end{bmatrix} = \begin{bmatrix} -2 & -1 \\ 0 & 1 \end{bmatrix}$
方阵
行数和列数相同的矩阵称作方阵(square matrix)。常用的有2x2,3x3和4x4方阵。如下为一个3x3的方阵:
$\begin{bmatrix} m_{11} & m_{12} & m_{13} \\ m_{21} & m_{22} & m_{23} \\ m_{31} & m_{32} & m_{33} \end{bmatrix}$
对称矩阵
转置矩阵和自身相等的方阵,即:$A^{T}=A$。如下为一个3x3的对称矩阵:
$\begin{bmatrix} 1 & 2 & 3 \\ 2 & 4 & -5 \\ 3 & -5 & 6 \end{bmatrix}$
反对称矩阵
转置矩阵和自身相等的方阵,即:$A^{T}=-A$。如下为一个3x3的对称矩阵:
$\begin{bmatrix} 0 & 2 & -1 \\ -2 & 0 & -4 \\ 1 & 4 & 0 \end{bmatrix}$
对角矩阵
对角矩阵是所有非对角线元素都为0的方阵。一般记作$D$。如下为一个4x4的对角矩阵:
$\begin{bmatrix} 3 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & -5 & 0 \\ 0 & 0 & 0 & 2 \end{bmatrix}$
单位矩阵
单位矩阵(Identity Matrix)是一个对角线上的元素为1,其他都是0的N×N对角矩阵。$n$维单位矩阵记作$I_n$或者$E_n$。如下为一个4x4的单位矩阵:
$\begin{bmatrix} \color{red}1 & \color{red}0 & \color{red}0 & \color{red}0 \\ \color{green}0 & \color{green}1 & \color{green}0 & \color{green}0 \\ \color{blue}0 & \color{blue}0 & \color{blue}1 & \color{blue}0 \\ \color{purple}0 & \color{purple}0 & \color{purple}0 & \color{purple}1 \end{bmatrix}$
单位矩阵非常特殊:它是矩阵乘法的单位元(类似于数字1)。即:任意一个矩阵乘以单位矩阵,都将得到原矩阵。
$M\cdot I = I\cdot M = M$
矩阵与矩阵相乘
m×n矩阵与n×p矩阵才能相乘,得到新的m×p矩阵。即:只有当左侧矩阵的列数与右侧矩阵的行数相等,两个矩阵才能相乘。这表明乘法一般不具有交换性($A\cdot B\ne B\cdot A$)
$\begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \\ a_{31} & a_{32} \\ a_{41} & a_{42} \end{bmatrix} \cdot \begin{bmatrix} b_{11} & b_{12} & b_{13} & b_{14} \\ b_{21} & b_{22} & b_{23} & b_{24} \end{bmatrix} = \begin{bmatrix} c_{11} & c_{12} & c_{13} & c_{14} \\ c_{21} & c_{22} & c_{23} & c_{24} \\ c_{31} & c_{32} & c_{33} & c_{34} \\ c_{41} & c_{42} & c_{43} & c_{44} \end{bmatrix}$
其中,$ c_{ij} = \sum_{k=1}^{n} a_{ik}\cdot b_{kj}$。
即:$C$矩阵第i行第j列的元素等于$A$矩阵第i行与$B$矩阵第j列所在向量的点积。用公式表示为:$c_{ij} = \bar{a_i}\cdot \bar{b_j}$
例如:$ \color{blue}{c_{24}} = \color{red}{a_{21}} \cdot \color{green}{b_{14}} + \color{red}{a_{22}} \cdot \color{green}{b_{24}}$
一种更直观的写法是将矩阵$B$写在矩阵$C$的上面,目的是使$A$的行和$B$的列与$C$中对应的元素对齐。如下:
$\begin{bmatrix} b_{11} & b_{12} & b_{13} & \color{green}{b_{14}} \\ b_{21} & b_{22} & b_{23} & \color{green}{b_{24}} \end{bmatrix}$
$\begin{bmatrix} a_{11} & a_{12} \\ \color{red}{a_{21}} & \color{red}{a_{22}} \\ a_{31} & a_{32} \\ a_{41} & a_{42} \end{bmatrix}$ $ \begin{bmatrix} c_{11} & c_{12} & c_{13} & c_{14} \\ c_{21} & c_{22} & c_{23} & \color{blue}{c_{24}} \\ c_{31} & c_{32} & c_{33} & c_{34} \\ c_{41} & c_{42} & c_{43} & c_{44} \end{bmatrix}$
2×2矩阵相乘公式
$\begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{bmatrix} \cdot \begin{bmatrix} b_{11} & b_{12} \\ b_{21} & b_{22} \end{bmatrix}=\begin{bmatrix} a_{11}\cdot b_{11} + a_{12}\cdot b_{21} & a_{11}\cdot b_{12} + a_{12}\cdot b_{22} \\ a_{21}\cdot b_{11} + a_{22}\cdot b_{21} & a_{21}\cdot b_{12} + a_{22}\cdot b_{22} \end{bmatrix} $
3×3矩阵相乘公式
$\begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix} \cdot \begin{bmatrix} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \\ b_{31} & b_{32} & b_{33} \end{bmatrix} =\begin{bmatrix} a_{11}\cdot b_{11} + a_{12}\cdot b_{21}+ a_{13}\cdot b_{31} & a_{11}\cdot b_{12} + a_{12}\cdot b_{22}+ a_{13}\cdot b_{32} & a_{11}\cdot b_{13} + a_{12}\cdot b_{23}+ a_{13}\cdot b_{33} \\ a_{21}\cdot b_{11} + a_{22}\cdot b_{21}+ a_{23}\cdot b_{31} & a_{21}\cdot b_{12} + a_{22}\cdot b_{22}+ a_{23}\cdot b_{32} & a_{21}\cdot b_{13} + a_{22}\cdot b_{23}+ a_{23}\cdot b_{33} \\ a_{31}\cdot b_{11} + a_{32}\cdot b_{21}+ a_{33}\cdot b_{31} & a_{31}\cdot b_{12} + a_{32}\cdot b_{22}+ a_{33}\cdot b_{32} & a_{31}\cdot b_{13} + a_{32}\cdot b_{23}+ a_{33}\cdot b_{33} \end{bmatrix}$
2×2矩阵相乘示例
$\begin{bmatrix} \color{red}1 & \color{red}2 \\ \color{green}3 & \color{green}4 \end{bmatrix} \cdot \begin{bmatrix} \color{blue}5 & \color{purple}6 \\ \color{blue}7 & \color{purple}8 \end{bmatrix} = \begin{bmatrix} \color{red}1 \cdot \color{blue}5 + \color{red}2 \cdot \color{blue}7 & \color{red}1 \cdot \color{purple}6 + \color{red}2 \cdot \color{purple}8 \\ \color{green}3 \cdot \color{blue}5 + \color{green}4 \cdot \color{blue}7 & \color{green}3 \cdot \color{purple}6 + \color{green}4 \cdot \color{purple}8 \end{bmatrix} = \begin{bmatrix} 19 & 22 \\ 43 & 50 \end{bmatrix}$
3×3矩阵相乘示例
$\begin{bmatrix} \color{red}4 & \color{red}2 & \color{red}0 \\ \color{green}0 & \color{green}8 & \color{green}1 \\ \color{blue}0 & \color{blue}1 & \color{blue}0 \end{bmatrix} \cdot \begin{bmatrix} \color{red}4 & \color{green}2 & \color{blue}1 \\ \color{red}2 & \color{green}0 & \color{blue}4 \\ \color{red}9 & \color{green}4 & \color{blue}2 \end{bmatrix} = \begin{bmatrix} \color{red}4 \cdot \color{red}4 + \color{red}2 \cdot \color{red}2 + \color{red}0 \cdot \color{red}9 & \color{red}4 \cdot \color{green}2 + \color{red}2 \cdot \color{green}0 + \color{red}0 \cdot \color{green}4 & \color{red}4 \cdot \color{blue}1 + \color{red}2 \cdot \color{blue}4 + \color{red}0 \cdot \color{blue}2 \\ \color{green}0 \cdot \color{red}4 + \color{green}8 \cdot \color{red}2 + \color{green}1 \cdot \color{red}9 & \color{green}0 \cdot \color{green}2 + \color{green}8 \cdot \color{green}0 + \color{green}1 \cdot \color{green}4 & \color{green}0 \cdot \color{blue}1 + \color{green}8 \cdot \color{blue}4 + \color{green}1 \cdot \color{blue}2 \\ \color{blue}0 \cdot \color{red}4 + \color{blue}1 \cdot \color{red}2 + \color{blue}0 \cdot \color{red}9 & \color{blue}0 \cdot \color{green}2 + \color{blue}1 \cdot \color{green}0 + \color{blue}0 \cdot \color{green}4 & \color{blue}0 \cdot \color{blue}1 + \color{blue}1 \cdot \color{blue}4 + \color{blue}0 \cdot \color{blue}2 \end{bmatrix} \\ = \begin{bmatrix} 20 & 8 & 12 \\ 25 & 4 & 34 \\ 2 & 0 & 4 \end{bmatrix}$
矩阵乘法的性质
(1) 矩阵乘法不满足交换律。即:$AB\ne BA$
(2) 矩阵乘法满足结合律。即$(AB)C=A(BC)$ 注1:假设$A$、$B$、$C$的维数使其乘法有意义。 注2:如果$(AB)C$有意义,那么$A(BC)$一定有意义。
扩展到多个矩阵的情况,也有:$ABCDEF=((((AB)C)D)E)F=A((((BC)D)E)F)=(AB)(CD)(EF)$ 注:所有括法都能计算出正确结果,但有些组中标量乘法更少。寻找使标量乘法最少的问题,称为矩阵链问题。
(3) 矩阵乘法也满足与标量或向量的结合律
$(kA)B=k(AB)=A(kB)$
$(\bar{v}A)B=\bar{v}AB$
(4) 分配率
$(A+B)C=AC+BC$
$C(A+B)=CA+CB$
(5) 反序定律:矩阵积的转置相当于先转置矩阵然后以相反的顺序乘
$(AB)^{T}=B^{T}A^{T}$
扩展到多个矩阵的情况,也有:$({M_1}{M_2}\cdots{M_{n-1}}{M_{n-2}})^{T}={M_{n-2}}^{T}{M_{n-1}}^{T}\cdots{M_2}^{T}{M_1}^{T}$
$(A^{k})^{T}=(A^{T})^{k}$ $k$为整数
矩阵的行列式
只有方阵才有行列式(为一个标量),非方阵矩阵的行列式是未定义的。
方阵$A$的行列式记作$\mid A\mid$或“det$A$”。
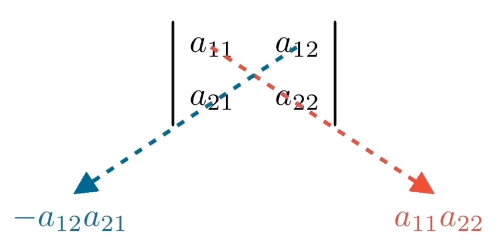
2×2矩阵行列式公式
$\begin{vmatrix}
A
\end{vmatrix}
=
\begin{vmatrix}
a_{11} & a_{12}\\
a_{21} & a_{22}
\end{vmatrix}
= a_{11}\cdot a_{22} - a_{12}\cdot a_{21}$
按照主对角线减去副对角线规律为:
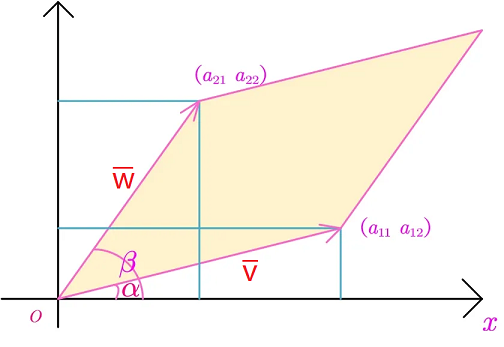
2阶行列式几何意义
行列式的值等于第1个行向量$\bar{v}$与第2个行向量$\bar{w}$为两边的平行四边形的有符号的面积。注:也可以使用第1个列向量与第2个列向量
当对$\bar{v}$到$\bar{w}$使用右手螺旋法则,如果大拇指方向朝向屏幕外,则面积为正;当大拇指方向朝向屏幕内,则面积为负。
$\begin{vmatrix}
A
\end{vmatrix}
=
\begin{vmatrix}
\bar{v} \\
\bar{w}
\end{vmatrix}
=
\begin{vmatrix}
a_{11} & a_{12}\\
a_{21} & a_{22}
\end{vmatrix}
= a_{11}\cdot a_{22} - a_{12}\cdot a_{21}$
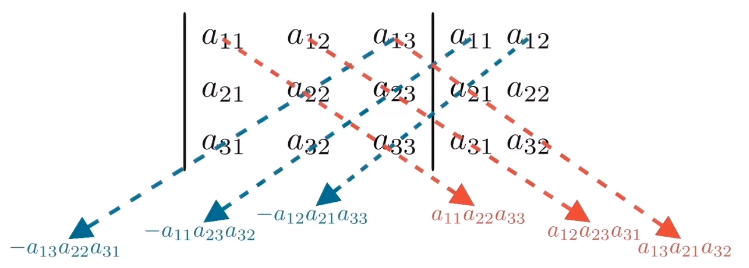
3×3矩阵行列式公式
$\begin{vmatrix}
A
\end{vmatrix}
=
\begin{vmatrix}
a_{11} & a_{12} & a_{13}\\
a_{21} & a_{22} & a_{23}\\
a_{31} & a_{32} & a_{33}
\end{vmatrix}\\
= a_{11}\cdot a_{22}\cdot a_{33}+a_{12}\cdot a_{23}\cdot a_{31}+a_{13}\cdot a_{21}\cdot a_{32}-a_{13}\cdot a_{22}\cdot a_{31}-a_{12}\cdot a_{21}\cdot a_{33}-a_{11}\cdot a_{23}\cdot a_{32}\\
= a_{11}\cdot(a_{22}\cdot a_{33}-a_{23}\cdot a_{32}) + a_{12}\cdot(a_{23}\cdot a_{31}-a_{21}\cdot a_{33}) + a_{13}\cdot(a_{21}\cdot a_{32}-a_{22}\cdot a_{31})$
按照主对角线减去副对角线规律为:
三元组积
如果将3x3阶矩阵的行解释为3个向量,那么矩阵的行列式等于这些向量的三元组积
$\begin{vmatrix}
\bar{a}\\
\bar{b}\\
\bar{c}
\end{vmatrix}
=
\begin{vmatrix}
a_x & a_y & a_z\\
b_x & b_y & b_z\\
c_x & c_y & c_z
\end{vmatrix}\\
= a_x \cdot b_y \cdot c_z+a_y \cdot b_z \cdot c_x+a_z \cdot b_x \cdot c_y-a_z \cdot b_y \cdot c_x-a_y \cdot b_x \cdot c_z-a_x \cdot b_z \cdot c_y\\
= (a_y \cdot b_z-a_z \cdot b_y) \cdot c_x + (a_z \cdot b_x-a_x \cdot b_z) \cdot c_y + (a_x \cdot b_y-a_y \cdot b_x) \cdot c_z\\
= (\bar{a} \times \bar{b}) \cdot \bar{c}$
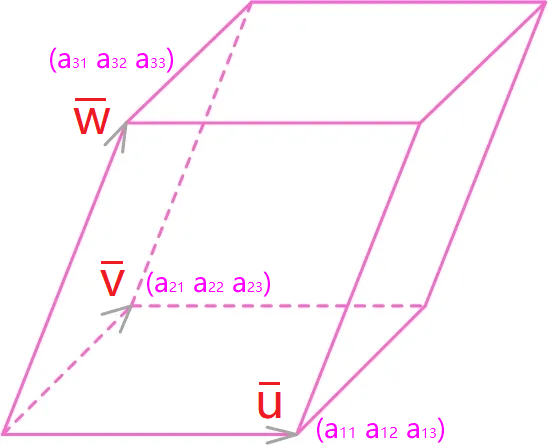
3阶行列式几何意义
行列式的值等于第1个行向量$\bar{u}$、第2个行向量$\bar{v}$和第3个行向量$\bar{w}$为棱边的平行六面体的有符号的体积。注:也可以使用第1个列向量、第2个列向量与第3个列向量
当对$\bar{u}$到$\bar{v}$使用右手螺旋法则,如果大拇指方向与$\bar{w}$在大拇指方向的分量朝向一致,则面积为正;朝向相反,则面积为负。
$\begin{vmatrix}
A
\end{vmatrix}
=
\begin{vmatrix}
\bar{u} \\
\bar{v} \\
\bar{w}
\end{vmatrix}
=
\begin{vmatrix}
a_{11} & a_{12} & a_{13}\\
a_{21} & a_{22} & a_{23}\\
a_{31} & a_{32} & a_{33}
\end{vmatrix}$
4x4矩阵行列式公式
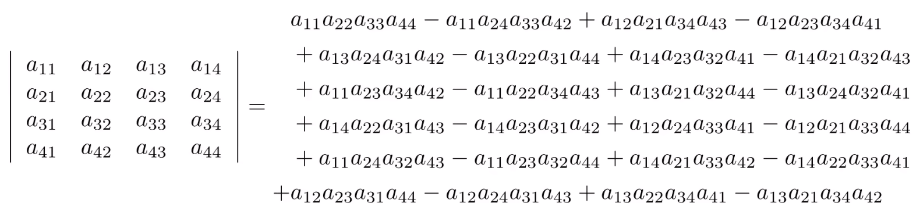
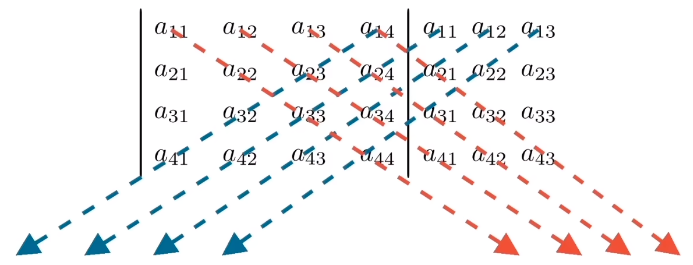
4阶不能按照主对角线减去副对角线规律,该规律下计算式只有8项(如下),但实际它的计算式有24项
nxn矩阵行列式公式
n阶方阵$A=(a_ia_j)$,其定义为:
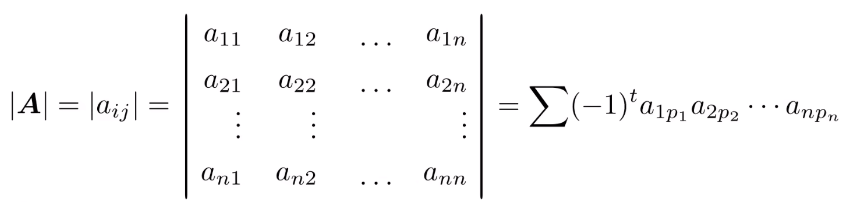
其中:$p_1p_2\cdot\cdot\cdot p_n$是数字1到n的全排列(全排列即不遗漏不重复地将所有数字排在一起,n个不同数的全排列种数有n!个)
t为全排列$p_1p_2\cdot\cdot\cdot p_n$的逆序数
$\sum$表示对$1,2,\cdot \cdot \cdot ,n$的所有全排列$p_1p_2\cdot\cdot\cdot p_n$求和
----------------------------------逆序数说明-----------------------------------------
2431中的逆序有(2,1),(4,3),(4,1),(3,1),即其逆序数为4,它是一个偶排列。
45321中的逆序有(4,3),(4,2),(4,1),(5,3),(5,2),(5,1),(3,2),(3,1),(2,1),即其逆序数为9,它是一个奇排列。
排列1,2,...,n中没有逆序,即逆序数为零,因而它是偶排列。
-----------------------------------------------------------------------------------------
更多信息详见:马同学图解数学 -- 如何计算n阶行列式(如何理解全排列,逆序数及行列式的定义)
行列式的性质
(1) 矩阵积的行列式等于矩阵行列式的积:$\mid A \cdot B \mid = \mid A \mid \cdot \mid B \mid$
(2) 这可以扩展到多个矩阵的情况:$\mid A_1 A_2 \cdot\cdot \cdot A_n \mid = \mid A_1 \mid \cdot \mid A_2 \mid \cdot\cdot \cdot \mid A_n \mid$
(3) 矩阵转置的行列式等于原矩阵的行列式:$\mid A^T \mid = \mid A \mid$
(4) 行列式的任意行或列全为0,那么它的值等于0
(5) 行列式有两行或列元素完全相同,那么它的值等于0
(6) 交换行列式的任意两行或两列,它的值变负
(7) 用数k乘行列式某一行或某一列中所有元素,等于用k乘此行列式
(8) 任意行或列的k倍($k \ne 0$)加到另一行或列上不会改变行列式的值
(9) 行列式中某一行(列)的每个元素是两数之和,则此行列式可拆分为两个相加的行列式,该性质也可以称为行列式的加法

更多详见:行列式的运算性质
余子式和代数余子式
n阶行列式$\mid A \mid$,除去第$i$行和第$j$列后剩下的行列式$\mid A_{ij} \mid$,称为元素$a_{ij}$的余子式。
考虑第$i$行和第$j$列符号的余子式,称为元素$a_{ij}$的代数余子式:$c_{ij}=(-1)^{i+j}\mid A_{ij} \mid$
从矩阵中任意选择一行或一列,对该行或列中的每个元素,都乘以对应的代数余子式,乘积的和就是矩阵的行列式。例如选择行$i$,行列式的计算过程如下公式:
$\mid A \mid = \sum_{j=1}^{n}a_{ij}c_{ij} = \sum_{j=1}^{n}a_{ij}(-1)^{i+j}\mid A_{ij} \mid = \sum_{j=1}^{n}(-1)^{i+j}a_{ij}\mid A_{ij} \mid$
利用代数余子式计算4x4行列式
$\begin{vmatrix} a_{11} & a_{12} & a_{13} & a_{14}\\ a_{21} & a_{22} & a_{23} & a_{24}\\ a_{31} & a_{32} & a_{33} & a_{34}\\ a_{41} & a_{42} & a_{43}
& a_{44} \end{vmatrix}
=a_{11}\begin{vmatrix} a_{22} & a_{23} & a_{24}\\ a_{32} & a_{33} & a_{34}\\ a_{42} & a_{43} & a_{44} \end{vmatrix}-a_{21}\begin{vmatrix} a_{12} & a_{13} &
a_{14}\\ a_{32} & a_{33} & a_{34}\\ a_{42} & a_{43} & a_{44} \end{vmatrix}+a_{31}\begin{vmatrix} a_{12} & a_{13} & a_{14}\\ a_{22} & a_{23} & a_{24}\\ a_{42}
& a_{43} & a_{44} \end{vmatrix}-a_{41}\begin{vmatrix} a_{12} & a_{13} & a_{14}\\ a_{22} & a_{23} & a_{24}\\ a_{32} & a_{33} & a_{34} \end{vmatrix}$
余子式的性质
当$i \ne j$时,则$a_{j1} \cdot \mid A_{i1} \mid + a_{j2} \cdot \mid A_{i2} \mid + \cdot \cdot \cdot + a_{jn} \cdot \mid A_{in} \mid = 0$,或$a_{1j} \cdot \mid A_{1i} \mid + a_{2j} \cdot \mid A_{2i} \mid + \cdot \cdot \cdot + a_{nj} \cdot \mid A_{ni} \mid = 0$
当$i = j$时,则$a_{j1} \cdot \mid A_{i1} \mid + a_{j2} \cdot \mid A_{i2} \mid + \cdot \cdot \cdot + a_{jn} \cdot \mid A_{in} \mid = \mid A \mid$,或$a_{1j} \cdot \mid A_{1i} \mid + a_{2j} \cdot \mid A_{2i} \mid + \cdot \cdot \cdot + a_{nj} \cdot \mid A_{ni} \mid = \mid A \mid$
伴随矩阵
方阵$A$的代数余子式矩阵的转置矩阵为其伴随矩阵,记作$adj(A) $,或$A^{*}$。
2×2方阵
$\begin{bmatrix} a & b \\ c & d \end{bmatrix}$的伴随矩阵:
$\begin{bmatrix} d & -b \\ -c & a \end{bmatrix}$
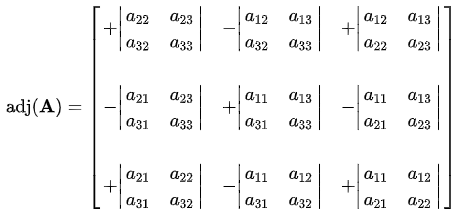
3×3方阵
$\begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix}$的伴随矩阵:
例如$\begin{bmatrix} -4 & -3 & 3 \\ 0 & 2 & -2 \\ 0 & 4 & -1 \end{bmatrix}$的伴随矩阵为:
$adj(A) = \begin{bmatrix} 6 & -2 & -2 \\ 9 & 1 & 13 \\ 0 & -8 & -8 \end{bmatrix} ^{T} = \begin{bmatrix} 6 & 9 & 0 \\ -2 & 1 & -8 \\ -2 & 13 & -8 \end{bmatrix} $
伴随矩阵的性质
(1) $I^{*} = I$
(2) $ A \cdot A^{*} = A^{*} \cdot A= \mid A\mid \cdot I$
(3) $ (A \cdot B)^{*} = B^{*} \cdot A^{*}$
(4) $ (A^{n})^{*} = (A^{*})^{n}$
(5) $(A^{T})^{*} = (A^{*})^{T}$
(6) $\mid A^{*}\mid = \mid A\mid^{n-1}$
(7) $(k \cdot A)^{*} = k^{n-1} \cdot A^{*}$
(8) $(A^{*})^{*} = \mid A\mid^{n-2} \cdot A$
(9) 如果A是对称矩阵,那么其伴随矩阵也是对称矩阵;如果A是反对称矩阵,那么当n为偶数时,A的伴随矩阵也是反对称矩阵,n为奇数时则是对称矩阵。
逆矩阵
矩阵虽然没有类似于标量除法的运算,但可通过逆矩阵来实现矩阵乘法逆运算。
只有方阵才可能有逆矩阵。一个nxn矩阵$M$的逆矩阵也是一个nxn矩阵,用符号$A^{-1} $表示。并非所有的方阵都有逆矩阵。
当一个方阵有逆矩阵,那么称它是可逆的或非奇异的;没有逆矩阵时,则它是不可逆的或奇异的。
矩阵$A$的逆矩阵为其伴随矩阵除以其行列式,公式如下:
$A^{-1} = \frac{A^{*}}{\mid A \mid} $
逆矩阵的性质
(1) 可逆矩阵(非奇异矩阵)的充分必要条件是其行列式不为0
(2) 对于任意可逆矩阵$A$,当且仅当列向量$\bar{v}$为$0$时,$\bar{v} \cdot A = 0 $;或者当且仅当行向量$\bar{v}$为$0$时,$A \cdot \bar{v} = 0 $。
(3) 当$A$、$B$为相同维度的可逆矩阵,则:$(A\cdot B)^{-1} = B^{-1}\cdot A^{-1}$
(4) $(k \cdot A)^{-1} = \frac{A^{-1}}{k}$
(5) $A\cdot A^{-1} = A^{-1}\cdot A = I$
(6) $(A^{-1})^{-1}= A$
(7) $(A^{T})^{-1}= (A^{-1})^{T}$
(8) $(AB)^{-1}=B^{-1}A^{-1}$
扩展到多个矩阵的情况,也有:$({M_1}{M_2}\cdots{M_{n-1}}{M_{n-2}})^{-1}={M_{n-2}}^{-1}{M_{n-1}}^{-1}\cdots{M_2}^{-1}{M_1}^{-1}$
(9) $(A^{*})^{-1}= (A^{-1})^{*} = \frac{A}{\mid A \mid}$
正交矩阵
若方阵$A$是正交矩阵,当且仅当$A$与它的转置矩阵$A^{T}$的乘积等于单位矩阵$I$。
$A \cdot A^{T}= I$
由于$A \cdot A^{-1}= I$,因此,如果一个矩阵是正交的,当且仅当它的转置矩阵等于它的逆。
$ A^{T}= A^{-1}$
以3x3方阵为例:
$ A = \begin{bmatrix} m_{11} & m_{12} & m_{13} \\ m_{21} & m_{22} & m_{23} \\ m_{31} & m_{32} & m_{33} \end{bmatrix}$
$ A \cdot A^{T} = \begin{bmatrix} m_{11} & m_{12} & m_{13} \\ m_{21} & m_{22} & m_{23} \\ m_{31} & m_{32} & m_{33} \end{bmatrix} \cdot \begin{bmatrix} m_{11} & m_{21} & m_{31} \\ m_{12} & m_{22} & m_{32} \\ m_{13} & m_{23} & m_{33} \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}$
设向量$\bar{u } = \begin{bmatrix} m_{11} & m_{12} & m_{13} \end{bmatrix}$,$\bar{v } = \begin{bmatrix} m_{21} & m_{22} & m_{23} \end{bmatrix}$,$\bar{w } = \begin{bmatrix} m_{31} & m_{32} & m_{33} \end{bmatrix}$,则:
$ A = \begin{bmatrix} \bar{u }\\ \bar{v } \\ \bar{w } \end{bmatrix} $
$ A \cdot A^{T} = \begin{bmatrix} \bar{u }\\ \bar{v } \\ \bar{w } \end{bmatrix} \cdot \begin{bmatrix} \bar{u } & \bar{v } & \bar{w } \end{bmatrix} = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}$
则得到:
$\bar{u } \cdot \bar{u } = 1$,$\bar{u } \cdot \bar{v } = 0$,$\bar{u } \cdot \bar{w } = 0$
$\bar{v } \cdot \bar{u } = 0$,$\bar{v } \cdot \bar{v } = 1$,$\bar{v } \cdot \bar{w } = 0$
$\bar{w } \cdot \bar{u } = 0$,$\bar{w } \cdot \bar{v } = 0$,$\bar{w } \cdot \bar{w } = 1$
做出一些解释:
当且仅当一个向量是单位向量时,它与自身的点积结果是1。因此,仅当$\bar{u } $,$\bar{v } $,$\bar{w } $是单位向量时,第1,5,9式成立。
当且仅当两个向量互相垂直时,它们的点积为0。因此,仅当$\bar{u } $,$\bar{v } $,$\bar{w }$ 互相垂直时,其他等式成立。
所以,若一个矩阵是正交的,它必须满足下列条件:
① 矩阵的每一行(列)都是单位向量
② 矩阵的所有行(列)互相垂直
正交矩阵的性质
(1) 任何向量$\bar{v }$在正交变换$A$后模长不变,证明过程如下:
设列向量$\bar{v } = \begin{pmatrix} x \\ y \\ z \end{pmatrix}$
$||\bar{v} ||=\bar{v }^{T} \cdot \bar{v } = \left ( x, y, z \right ) \cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix}$
设转换后的向量$\bar{w }=A \cdot \bar{v }$
$||\bar{w} ||=\bar{w }^{T} \cdot \bar{w } = \left (A \cdot \bar{v } \right )^{T} \cdot A \cdot \bar{v } = \bar{v }^{T} \cdot A^{T} \cdot A \cdot \bar{v } = \bar{v }^{T} \cdot \bar{v } = ||\bar{v} ||$
(2) 任何两个向量$\bar{v }$、$\bar{w }$,在正交变换$A$后,向量之间的内积不变。
(3) 在各种变换中,有一种变换拥有良好的特性——它能使变换后的向量长度,向量之间的内积、距离、夹角等很多性质都不变,这种变换,我们称为正交变换,用于实施这种变换的矩阵,我们称为正交矩阵,这种变换的特性,我们称为正交变换的不变性。
参考
【官方双语/合集】线性代数的本质 - 系列合集(3Blue1Brown)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号