基于创科视觉和UR机器人实现跟随
实现的效果:
实现的关键点:
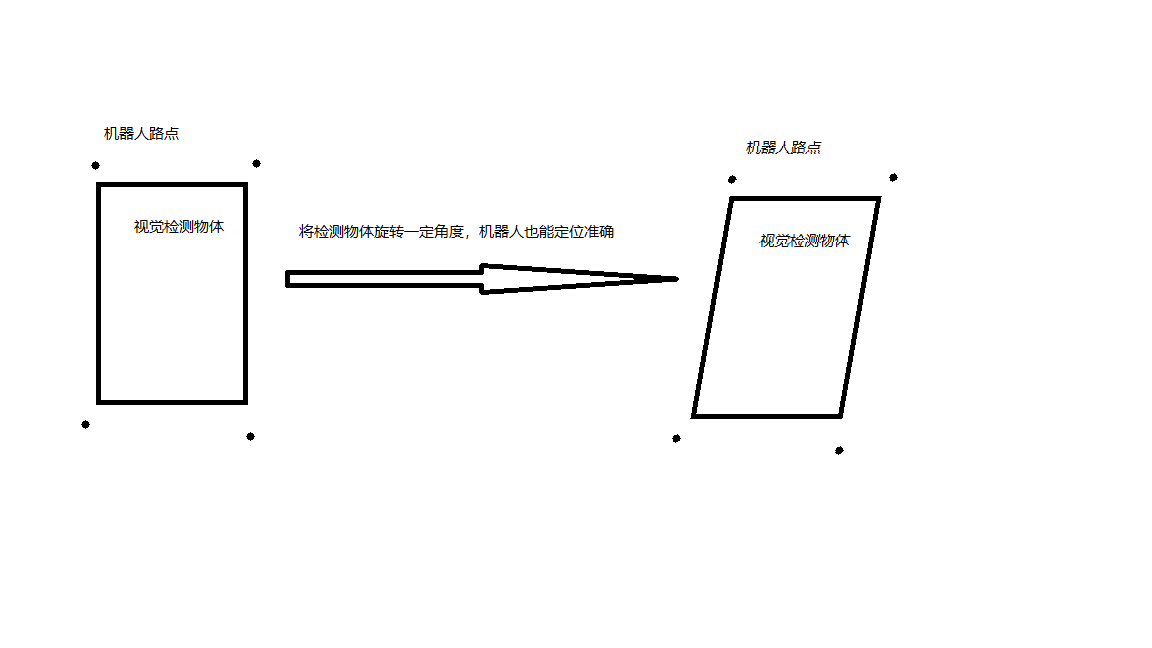
1、获取检测物体的旋转角度
2、机器人坐标与视觉坐标建立关系(用于像素坐标和机器人坐标之间相互转换)
3、建立通讯,UR机器人做客户端
4、先将机器人实际坐标转换成像素坐标,再通过“位置补正”之后转换成机器人坐标发给机器人(为避免图形畸变)
5、机器人只接收X、Y、RZ(角度),其中RX,RY均为0,Z(高度)自己定义
吾生也有涯,而知也无涯,以有涯随无涯,殆已。
实现的效果:
实现的关键点:
1、获取检测物体的旋转角度
2、机器人坐标与视觉坐标建立关系(用于像素坐标和机器人坐标之间相互转换)
3、建立通讯,UR机器人做客户端
4、先将机器人实际坐标转换成像素坐标,再通过“位置补正”之后转换成机器人坐标发给机器人(为避免图形畸变)
5、机器人只接收X、Y、RZ(角度),其中RX,RY均为0,Z(高度)自己定义

 浙公网安备 33010602011771号
浙公网安备 33010602011771号