摘要:
本系列教程主要讲解E-puck2机器人的介绍以及基本使用方法。本篇文章主要介绍E-puck2机器人软件的安装与使用。 阅读全文
posted @ 2018-09-05 09:41
kay880
阅读(621)
评论(0)
推荐(0)
摘要: 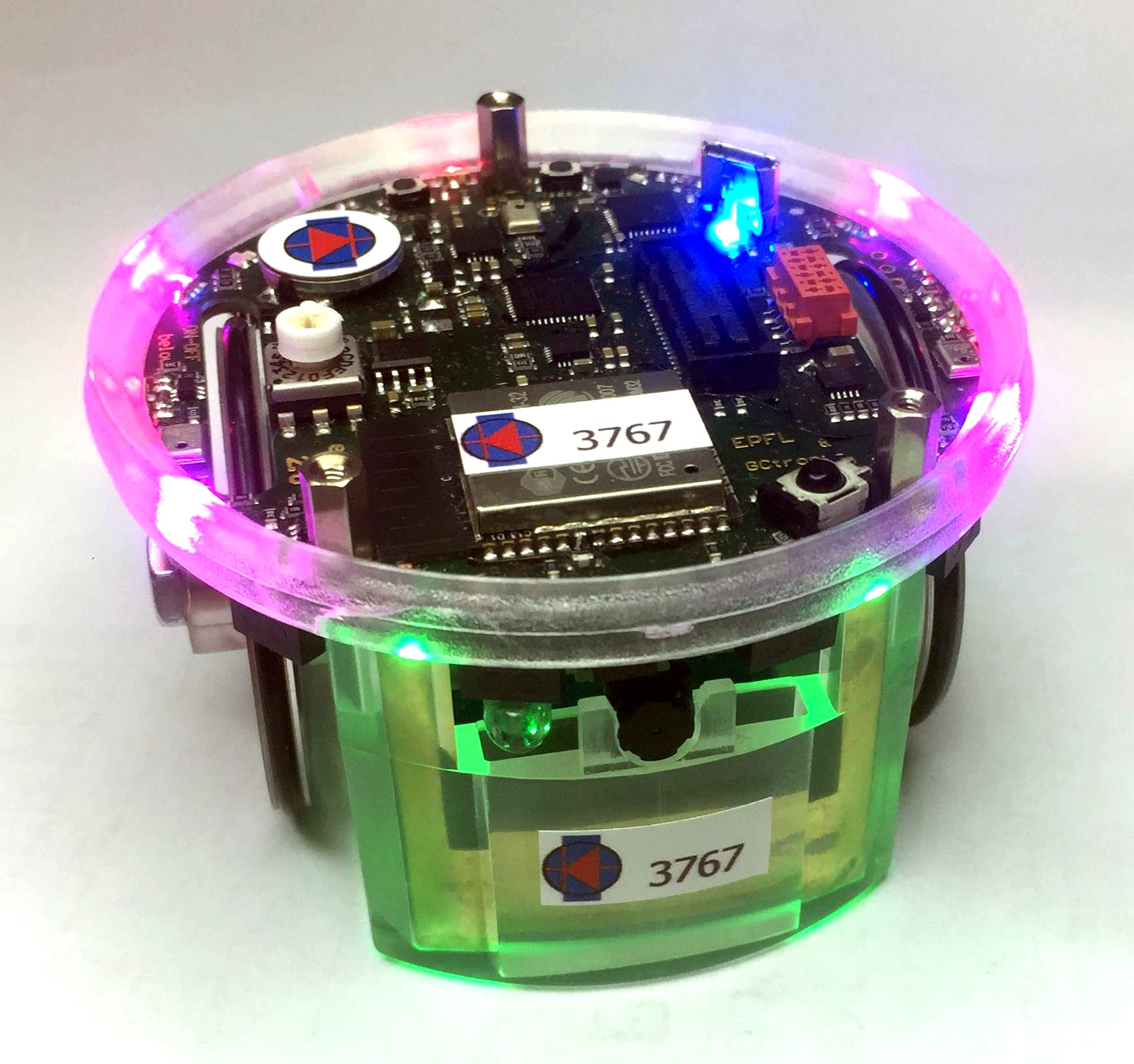 E-puck2 完整电气通信架构图如下: 该机器人是具有USB集线器,编程器/调试器(413),主处理器(407)和WiFi / BT模块(ESP32)的完整系统 e-puck2机器人具有3个板载芯片: 主微控制器(407):负责处理传感器和执行器,并运行演示/算法 e-puck2机器人主微控制器是 阅读全文
E-puck2 完整电气通信架构图如下: 该机器人是具有USB集线器,编程器/调试器(413),主处理器(407)和WiFi / BT模块(ESP32)的完整系统 e-puck2机器人具有3个板载芯片: 主微控制器(407):负责处理传感器和执行器,并运行演示/算法 e-puck2机器人主微控制器是 阅读全文
E-puck2 完整电气通信架构图如下: 该机器人是具有USB集线器,编程器/调试器(413),主处理器(407)和WiFi / BT模块(ESP32)的完整系统 e-puck2机器人具有3个板载芯片: 主微控制器(407):负责处理传感器和执行器,并运行演示/算法 e-puck2机器人主微控制器是 阅读全文
posted @ 2018-09-05 09:04
kay880
阅读(537)
评论(0)
推荐(0)
 浙公网安备 33010602011771号
浙公网安备 33010602011771号