TurtleBot3-Topic Monitor
- 注意:
- 该指令在Ubuntu 16.04和ROS Kinetic Kame上进行了测试。
- 该指令应该在远程PC上运行。 请在远程PC上运行以下指令。
- 确保在运行以下说明之前运行Bringup指令。
为了检查TurtleBot3的主题,我们将使用ROS提供的rqt。 rqt是一个基于Qt的框架,用于ROS的GUI开发。 rqt是一个允许用户通过显示主题列表中的所有主题轻松查看主题状态的工具。 GUI中有主题名称,类型,带宽,Hz,值。
[Remote PC]运行rqt。
rqt

提示:如果未显示rqt,请选择 plugin - >Topics - > Topic Monitor。
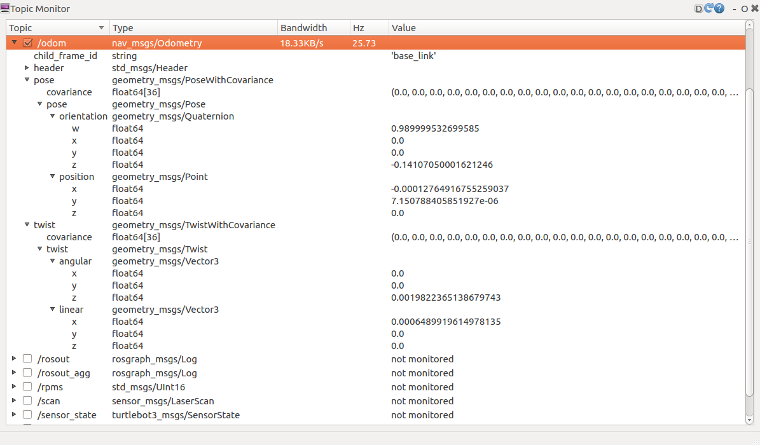
首次运行rqt时,不会监视主题值。 要监控主题,请单击每个主题旁边的复选框。
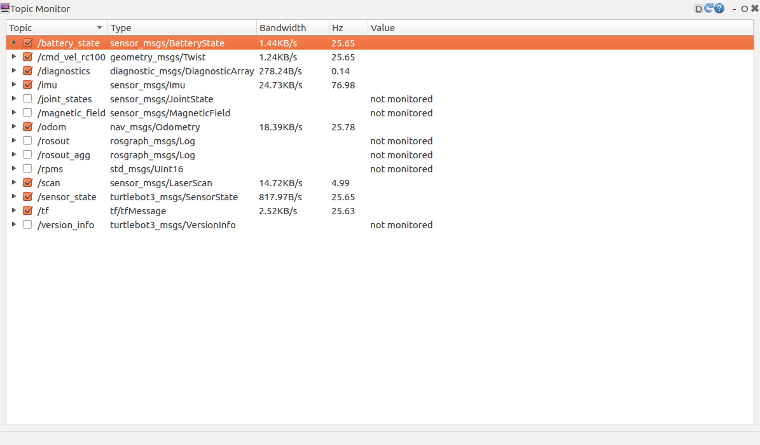
如果要查看更多详细信息主题消息,请单击每个复选框旁边的▶按钮。
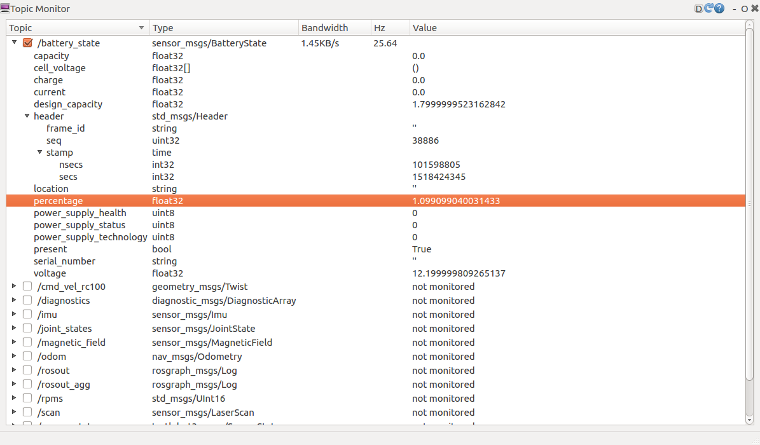
/battery_state表示与电池状况有关的消息,例如当前电池电压和剩余容量。
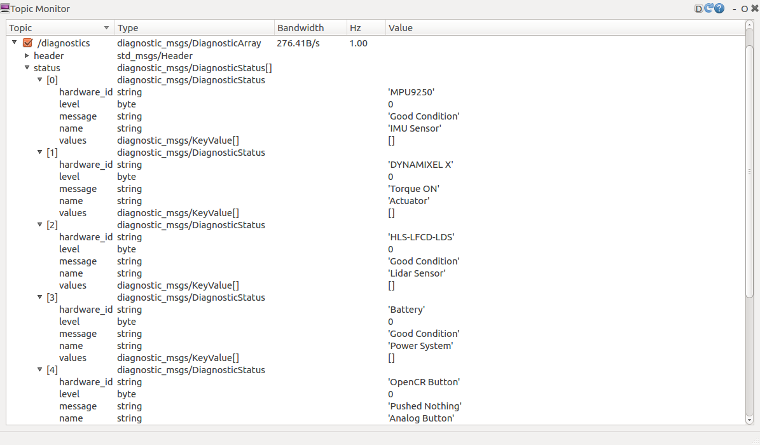
/diagnostics表示连接到TurtleBot3的组件状态的消息,例如MPU9250,DYNAMIXEL X,HLS-LFCD-LDS,电池和OpenCR。
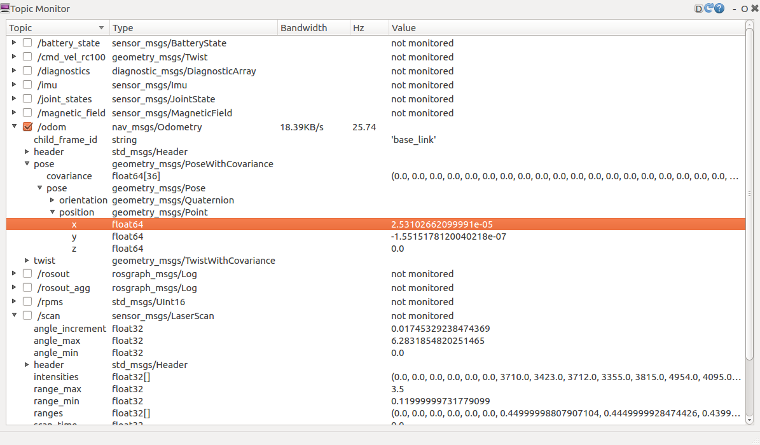
/odom表示TurtleBot3的里程表消息。 该主题具有编码器数据的方向和位置。
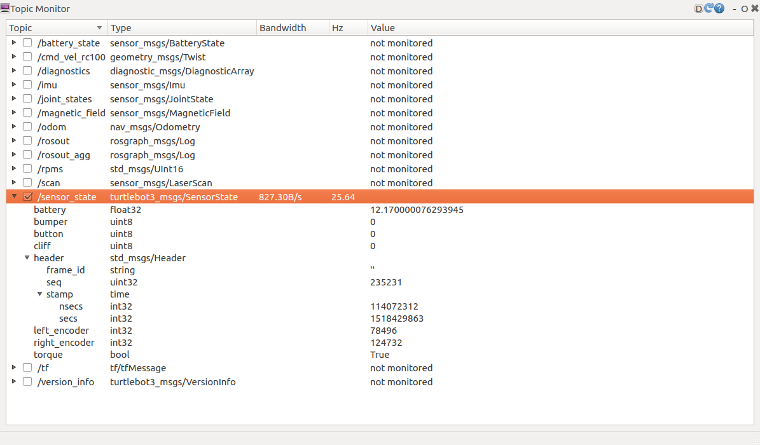
/sensor_state表示编码器值,电池和扭矩的消息。
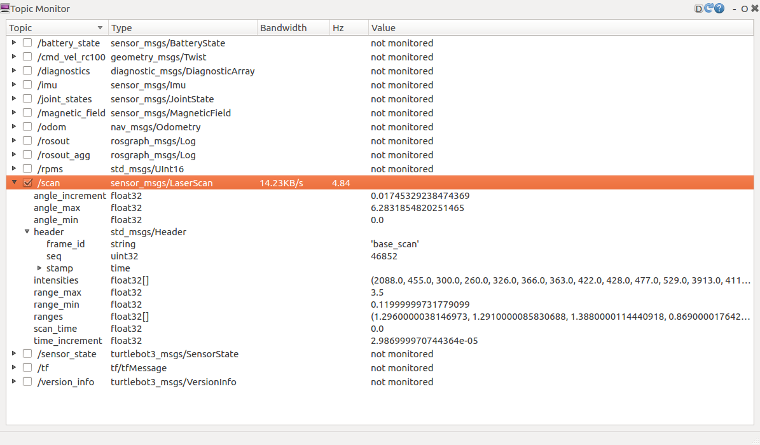
/scan表示所有LDS数据的消息,例如angle_max和min,range_max和min,表示范围。
此外,只要添加主题,您就可以通过rqt监控主题。
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号