E-PUCK2机器人-固件更新
对机器人进行官方固件更新,并且使用最后一个固件来更新机器人,以获得最新的功能,改进,以及错误修复。
板载编程器运行GDB服务器,因此我们使用GDB命令上传新固件,因此需要使用工具链将新固件上载到机器人。
以下步骤说明如何更新主微控制器固件:
- 下载包含所需工具链和脚本的软件包以对机器人进行编程:Windows,Linux 32位/ Linux 64位,Mac OS
- 下载最新版本的主微控制器固件(27.08.18),或使用您的自定义固件
- 解压缩包并将固件文件(带有elf扩展名)放在包目录中;请注意,此目录中只能有一个elf文件
- 连接USB电缆并打开机器人
- 从包目录运行脚本:
- Windows:双击program.bat
- Linux / Mac:在终端
中发出以下命令。如果您获得权限错误,请输入
./program.sh
以使脚本可执行。sudo chmod + x program.sh
上传完成后,您将看到如下图所示的输出:
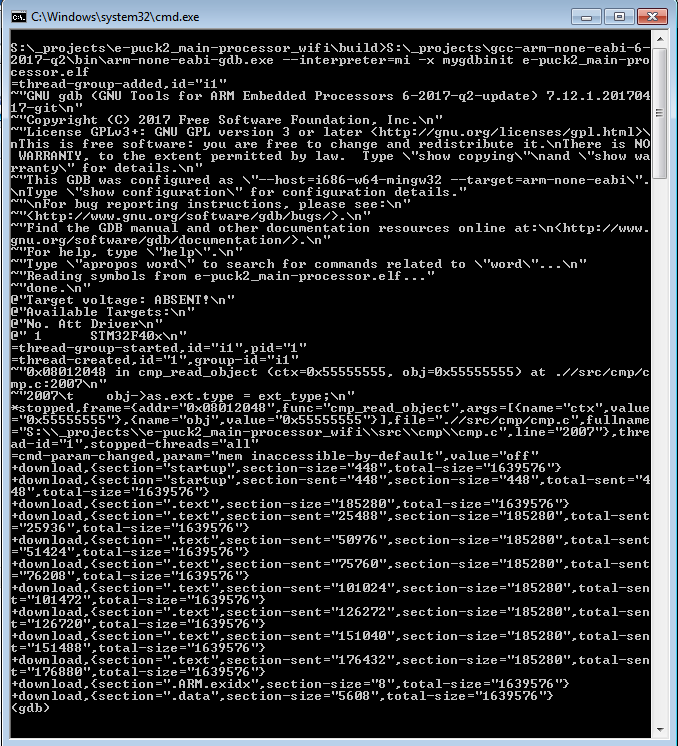
最后一行应包含条目“.data”,这意味着上传成功。 如果终端窗口仍处于打开状态,您可以关闭终端窗口。
如果遇到问题,请尝试拔下并重新插上USB电缆并重新启动机器人,然后重试。
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号