E-puck2机器人系列教程-2.软件的安装与使用
注意:该例程必须仅适用于Windows 10之前的版本(Windows 7、Windows 8)的Windows用户安装USB驱动程序:
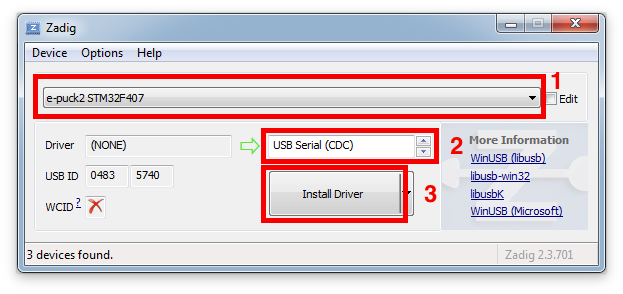
- 下载并打开zadig-2.3.exe
- 用USB线连接e-puck2并将其打开。 程序的设备列表中出现三个未知设备,即e-puck2 STM32F407, e-puck2 GDB Server (Interface 0) 和 e-puck2 Serial Monitor (Interface 2)。
- 对于上述三种设备中的每一种,选择USB Serial(CDC)驱动程序并单击Install Driver按钮进行安装。 接受在此过程中可能出现的不同提示。 最后,您只需退出程序并安装驱动程序即可。 这些步骤如下图3所示。
注意:安装的驱动程序位于C:\ Users \“your_user_name”\ usb_driver中。
在Windows 10,Linux和Mac OS中驱动程序会自动安装。
在Linux中为了访问串行端口,需要一些配置。 在终端会话中键入以下命令:
sudo adduser $ USER dialout
完成后,您需要注销才能使更改生效。
查找使用的USB串行端口
当USB电缆连接到机器人时,e-puck2的编程器会创建两个端口(即使机器人已关闭):
- e-puck2 GDB服务器。 用于编程和调试e-puck2的端口。
- e-puck2串行监视器。 PC和无线电模块之间的串行通信(也用于对无线电模块进行编程)。
根据e-puck2微控制器内部的代码,可以使用第三个端口。 使用工厂固件创建名为e-puck2 STM32F407的端口。
windows
- 打开设备管理器
- 在端口(COM和LPT)下,您可以看到连接到计算机的虚拟端口。
- 在要识别的COM端口上右键单击 - >属性。
- 转到详细信息选项卡,然后在属性列表中选择总线报告的设备描述。
- 端口名称应写在下面的文本框中。
- 找到所需的设备后,您只需查看其端口号(COMX)即可。
Linux
- 打开终端窗口(ctrl + alt + t)并输入以下命令:
ls /dev/ttyACM*
- 在生成的列表中查找ttyACM0和ttyACM1,它们分别是e-puck2 GDB Server和e-puck2 Serial Monitor。 ttyACM2也将提供固件,与e-puck2 STM32F407端口相关
注意:Linux上的虚拟串行端口编号取决于连接顺序,因此如果在连接机器人之前已使用虚拟串行端口的其他设备已连接到您的计算机,则它可能会有所不同,但序列保持不变。

MAC
1.打开一个终端窗口,然后输入以下命令:
ls /dev/cu.usbmodem*
2.查找两个cu.usbmodemXXXX,其中XXXX是计算机赋予的编号。您应该找到两个名称,它们彼此之间的编号接近,分别是e-puck2 GDB服务器(较低的编号)和e-puck2串行监视器(较高的编号)。第三个设备cu.usbmodemXXXX将随出厂固件一起提供,与e-puck2 STM32F407端口有关
注意:Mac上的虚拟串行端口编号取决于所使用的物理USB端口和设备。如果要保留相同的名称,则必须每次都连接到相同的USB端口
PC上位机
E-PUCK团队开发了PC上位机应用程序以开始使用机器人:您可以获得有关所有传感器的信息,接收摄像机图像以及控制LED和电机。
请注意,为了玩转机器人E-PUCK2,下载此上位机应用程序并不是必须的,但这是一个很好的演示,可以让您全面了解机器人上可用的所有传感器和执行器,这是熟悉机器人的第一步。
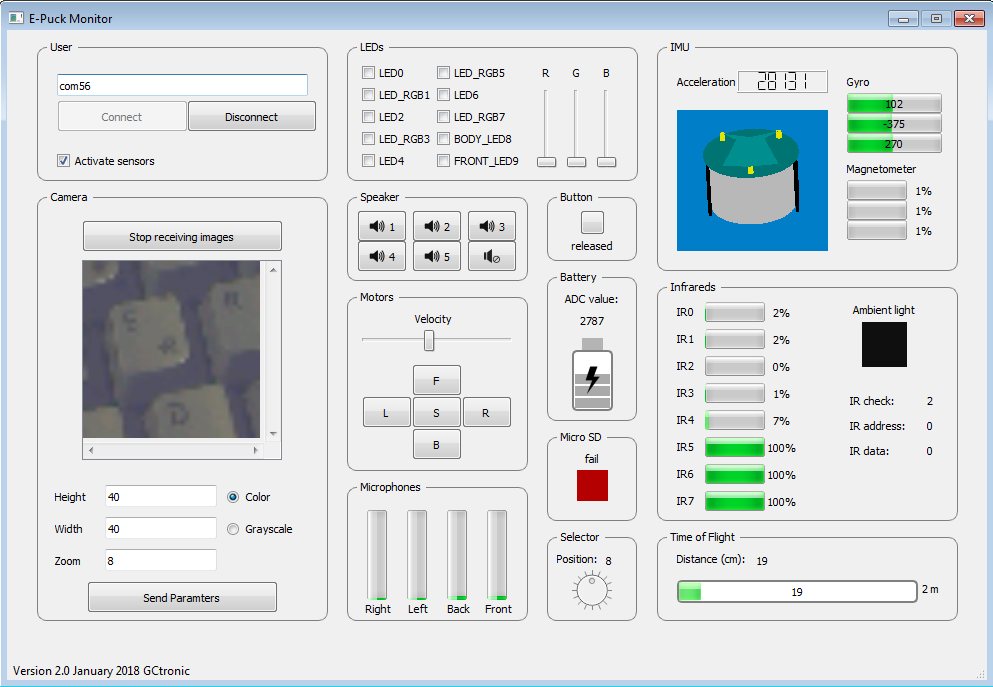
使用机器人中编程的默认固件,将选择器置于位置8,连接USB电缆并打开机器人。 在界面中输入正确的端口(与e-puck2 STM32F407相关的端口),然后单击“Connect”。源代码可从存储库https://github.com/e-puck2/monitor获得。
可用的可执行文件
- Windows可执行文件:在Windows 7和Windows 10上测试过
- Max OS X可执行文件
- Linux 32位/ Linux 64位
安装固件更新的依赖项
您可以更新E-PUCK2所有3个芯片的固件:主微控制器,无线模块和编程接口。 为此,您需要在系统上安装一些工具。
windows
要在微控制器或无线模块中上传新固件,您无需安装任何东西,提供的软件包中包括所有依赖项。
要在程序员中上传新固件,您需要安装STMicroelectronics发布的名为DfuSe的应用程序。 您可以从DfuSe_V3.0.5.zip下载它。
Linux
要在微控制器或无线模块中上传新固件,您需要:
- Python(> = 3.4):
sudo apt-get install python3
- Python pip:
sudo apt-get install -y python3-pip
- pySerial(> = 2.5):
sudo pip3 install pyserial
要在编程接口中上传新固件,您需要:
dfu-util:sudo apt-get install dfu-util
MAC
通过打开终端并发出以下命令来安装Homewbrew软件包管理器 :
/usr/bin/ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)"
然后
brew upgrade
要在微控制器或无线电模块中上载新固件,您需要:
- Python(> = 3.4):
brew install python
还将安装pip
- pySerial(> = 2.5):
pip3 install pyserial
要在编程器中上传新固件,您需要:
- dfu-util:
brew install dfu-util
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号