Turtlebot3 melodic-搭建仿真环境
此 Gazebo Simulation 使用ROS Gazebo 包,因此,在运行此指令之前,必须安装适用于 ROS1 Melotic 的正确 Gazebo 版本。
下载功能包
TurtleBot3模拟包需要turtlebot3和turtlebot3_msgs包作为先决条件。如果没有这些必备软件包,模拟将无法启动。如果您没有安装所需的包和依赖包,
cd ~/catkin_ws/src/ git clone -b melodic-devel https://gitee.com/kay2020/turtlebot3_simulations.git cd ~/catkin_ws && catkin_make
测试
为 TurtleBot3 准备了三个模拟环境。请选择其中一种环境来启动 Gazebo。
测试burger在空荡荡的世界
export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
export TURTLEBOT3_MODEL=waffle roslaunch turtlebot3_gazebo turtlebot3_world.launch
测试waffle_pi
export TURTLEBOT3_MODEL=waffle_pi roslaunch turtlebot3_gazebo turtlebot3_house.launch
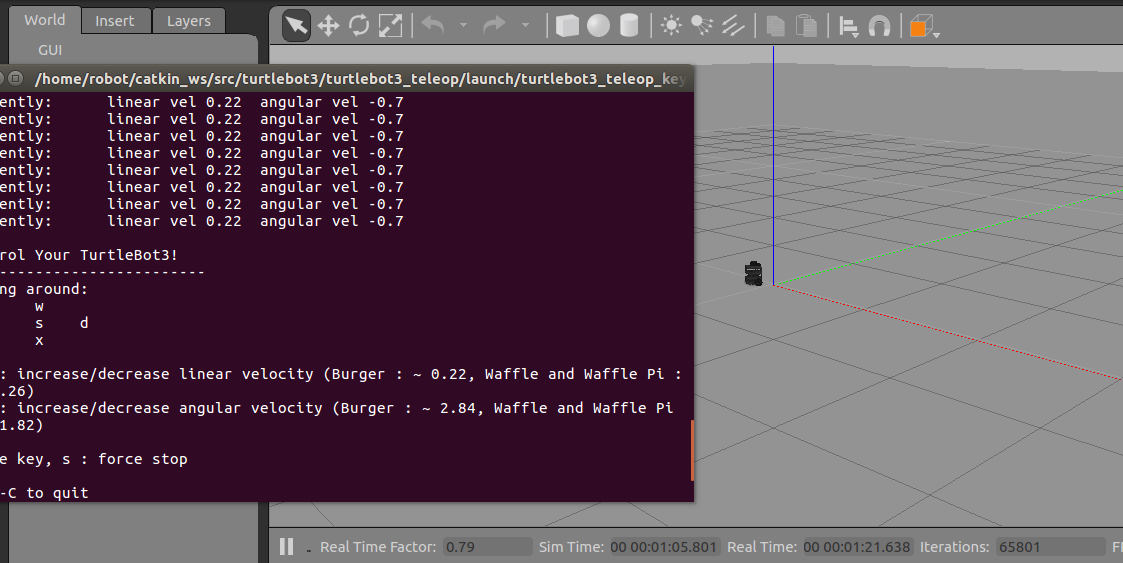
键盘控制仿真中的机器人
为了使用键盘遥控 TurtleBot3,请在新的终端窗口中使用以下命令启动遥控节点。
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号