Turtlebot3 ROS2 Dashing 运行使用
备注机器人类型
export TURTLEBOT3_MODEL=burger
机器人端
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
ros2 launch turtlebot3_bringup robot.launch.py
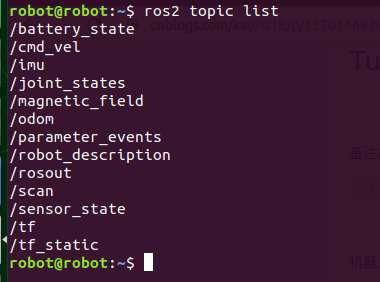
ros2 topic list
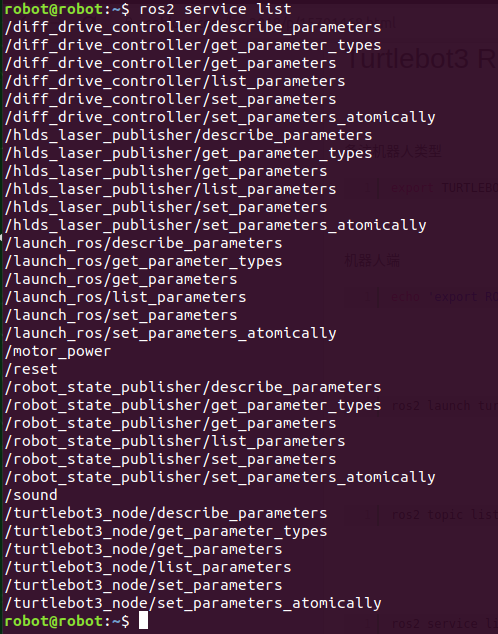
ros2 service list
ros2 launch turtlebot3_bringup rviz2.launch.py
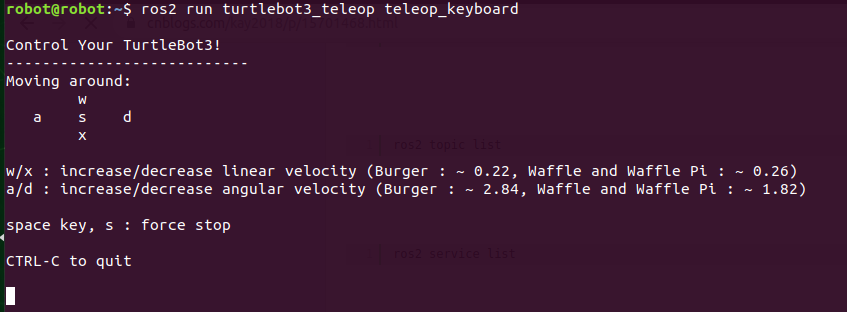
ros2 run turtlebot3_teleop teleop_keyboard
SLAM
ros2 launch turtlebot3_bringup robot.launch.py
ros2 launch turtlebot3_cartographer cartographer.launch.py
ros2 run nav2_map_server map_saver -f ~/map
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号