OpenManipulator-X Gazebo仿真(Noetic)
安装依赖
sudo apt-get install ros-noetic-ros-controllers ros-noetic-gazebo* ros-noetic-moveit* ros-noetic-industrial-core sudo apt install ros-noetic-dynamixel-sdk ros-noetic-dynamixel-workbench* sudo apt install ros-noetic-robotis-manipulator
下载安装包
cd ~/catkin_ws/src/ git clone -b noetic-devel https://gitee.com/kay2020/open_manipulator.git git clone -b noetic-devel https://gitee.com/kay2020/open_manipulator_msgs.git git clone -b noetic-devel https://gitee.com/kay2020/open_manipulator_simulations.git git clone https://gitee.com/kay2020/open_manipulator_dependencies.git cd ~/catkin_ws && catkin_make
启动Gazebo
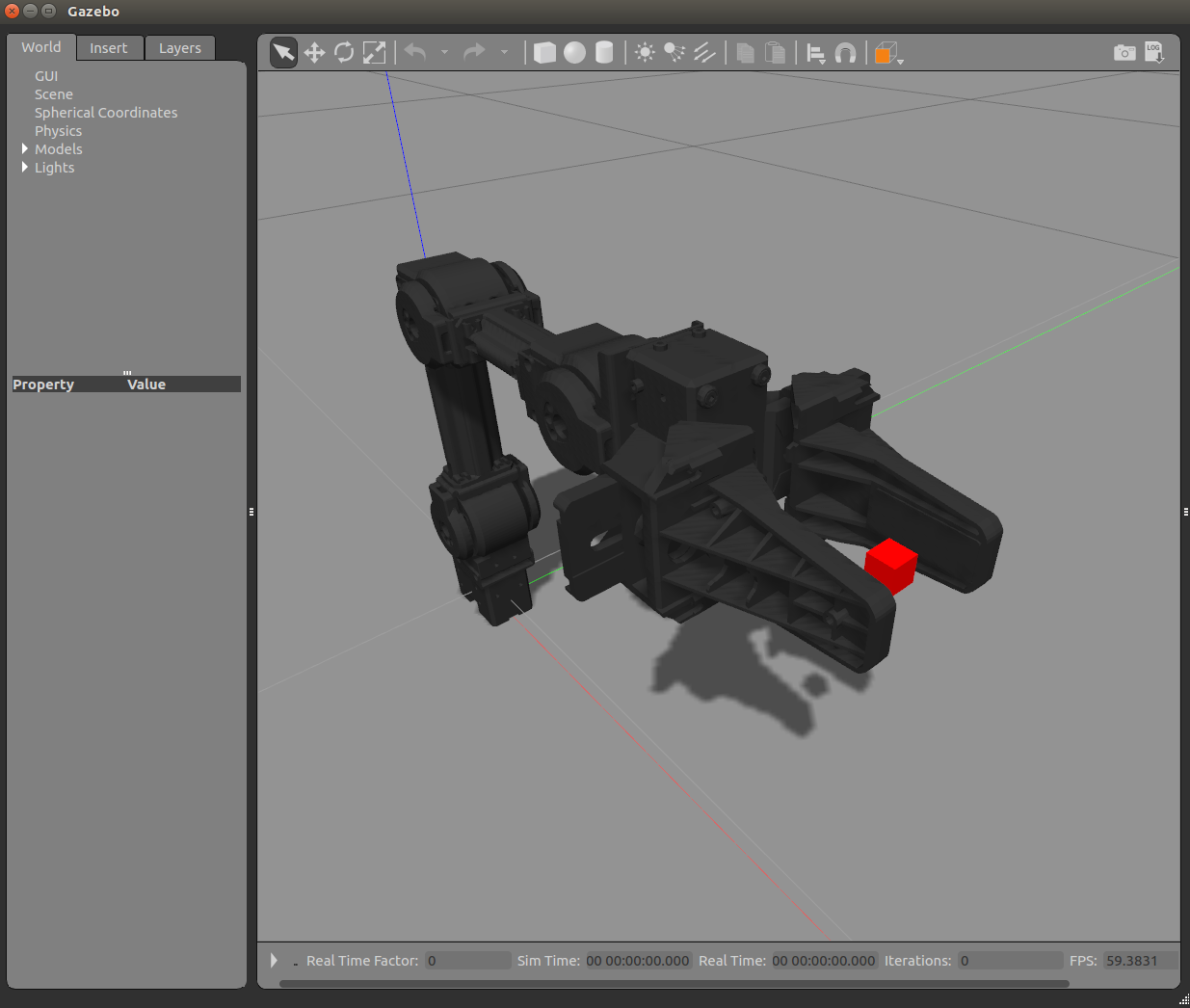
在 Gazebo 模拟器上加载 OpenManipulator-X,然后单击▶Gazebo 窗口底部的Play按钮。
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch
红色立方体表示末端执行器链接。
Gazebo控制器
启动 open_manipulator_controller 以进行 Gazebo 模拟。
为了在仿真环境中运行控制器,请确保将use_platform参数设置为,false以便控制器可以作为仿真控制器启动,如下所示。
roslaunch open_manipulator_controller open_manipulator_controller.launch use_platform:=false
在Gazebo的操作
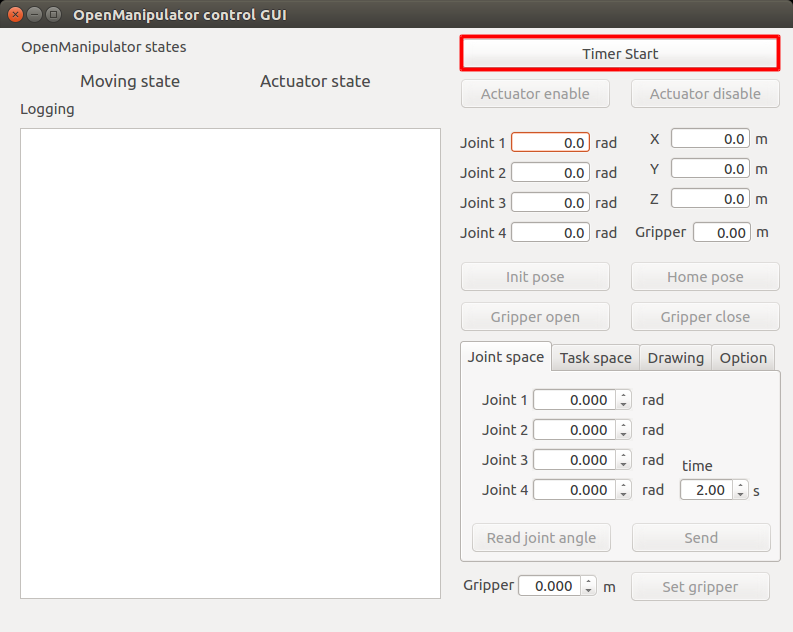
为了控制模拟的 OpenMANIPULATOR-X,启动OpenManipulator 控制 GUI或键盘远程操作
图形用户界面程序
roslaunch open_manipulator_control_gui open_manipulator_control_gui.launch
键盘遥操作
roslaunch open_manipulator_teleop open_manipulator_teleop_keyboard.launch
|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号