OP3 Gazebo仿真
总览
该篇文章主要讲解ROBOTIS OP3的Gazebo仿真应用。
安装
如果您安装的ROS版本为ros-kinetic-desktop-full,则您执行以下操作来安装Gazebo:
apt-get install ros-kinetic-ros-control apt-get install ros-kinetic-ros-controllers apt-get install ros-kinetic-gazebo-ros-control
在Gazebo中调用ROBOTIS-OP3的命令
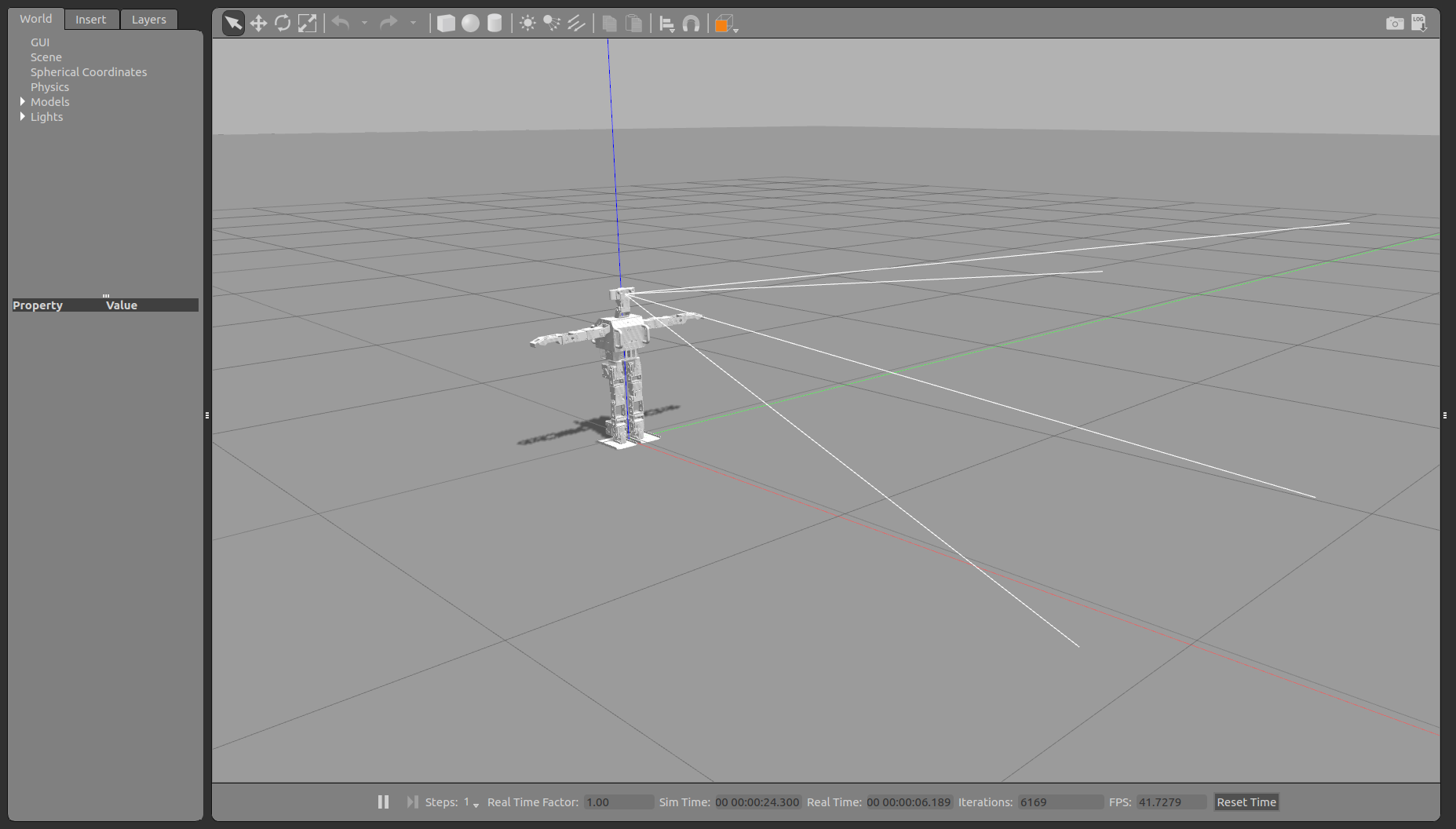
roslaunch op3_gazebo robotis_world.launch
启动op3_manager
roslaunch op3_manager op3_gazebo.launch
有用的链接

|
作者:kay 出处:https://www.cnblogs.com/kay2018/ 本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。 如果文中有什么错误,欢迎指出。以免更多的人被误导。 |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号