激光雷达课程笔记
| 章节 | 页码 | 考点 |
|---|---|---|
| 1 | 3 | |
| 1 | 3 | |
| 2 | 33 | 强度矫正理论与方法 |
| 27 | Lidar数据处理,四种波形数据处理方法 |
- 星载ICESat-2,使用的不是是APD(Glass1,弱光,ICESat-1,一路,10kHz)——单光子(ATLAS,微弱光,六路,40kHz)?
激光器,重频和能量之间的关系
- 能量小(为何能量小了? ——> 1.重频变高了;2.分光;3.冰雪(微弱信号))
- 提升密度
-
ADC一直工作?如何确定ADC的窗口?何时信号过宽?
不是一直工作,会增加数据量
带着已有高程数据,预估数据到达时间,打开ADC功能
倾斜角过大,方圆70米内高程差超过86m(544ns)就会信号过宽
38页,LiDAR数据目标反演,44页坡度&粗糙度反演 -
森林中激光雷达探测相较于经典算法有什么优势?(2-3个)
节省人力物力,精度更高?
能够为研究者提供更多的应用支撑,评价叶的物理性能,植物的蒸腾作用,微生物多样性 -
给四张图
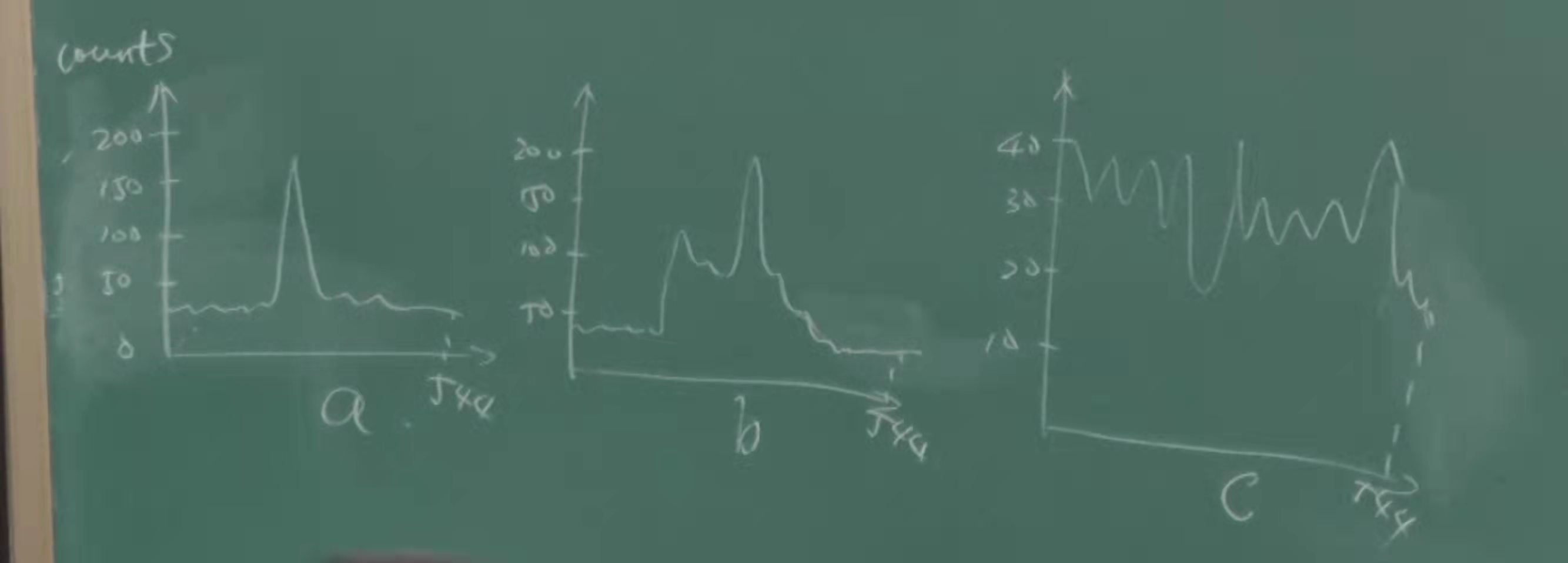
A: 普通地面,啥都没有
B: 很有可能是森林地区,丘陵地带
C: 噪声(1. 窗口时间错误(早开?晚开?544ns),2. 目标(第一代会有冰,水面))
- 大光斑-小光斑
5m~10m为界限,星载 vs 地基,机载?
绪论
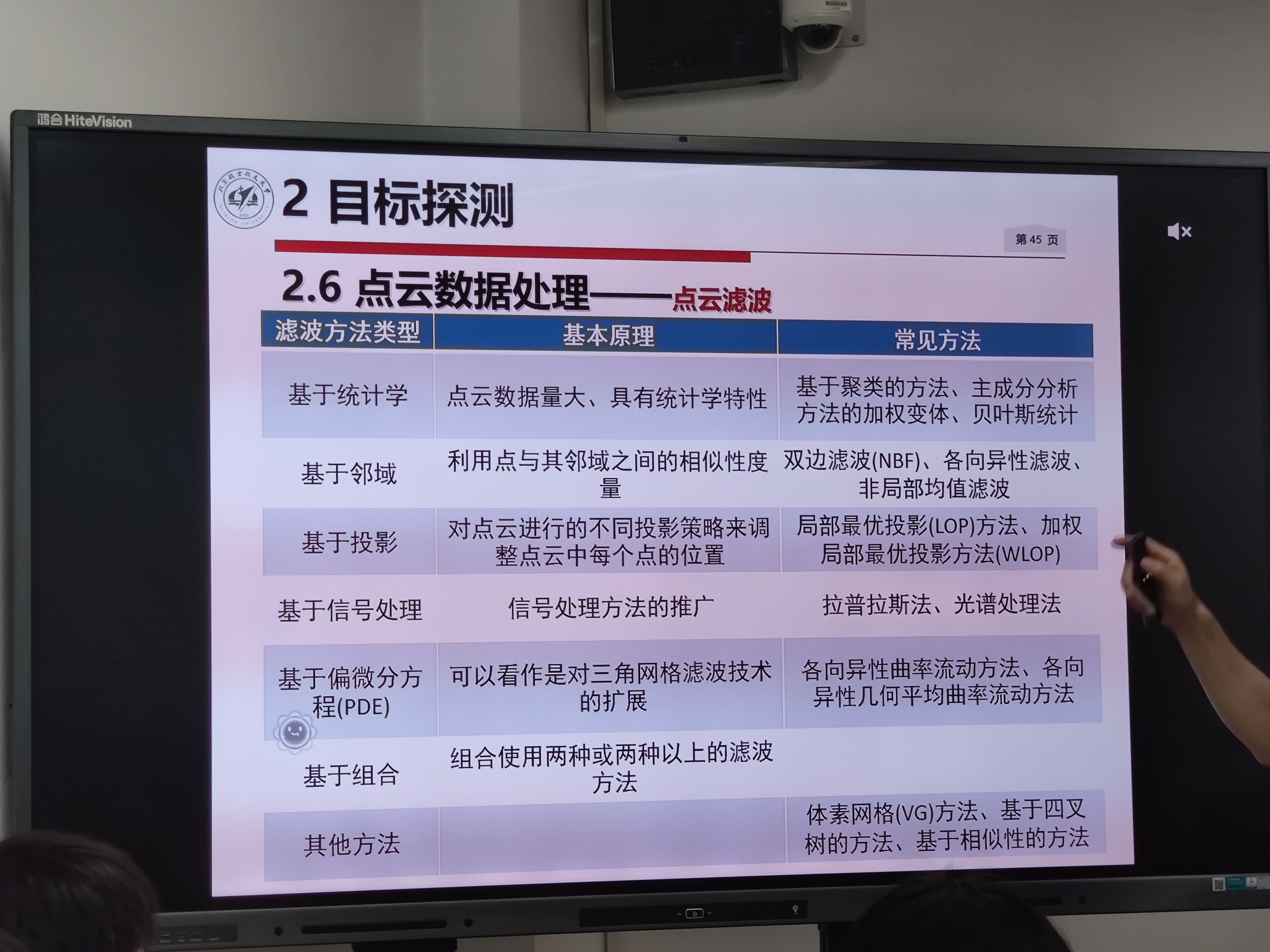
- 点云数据处理
点云滤波
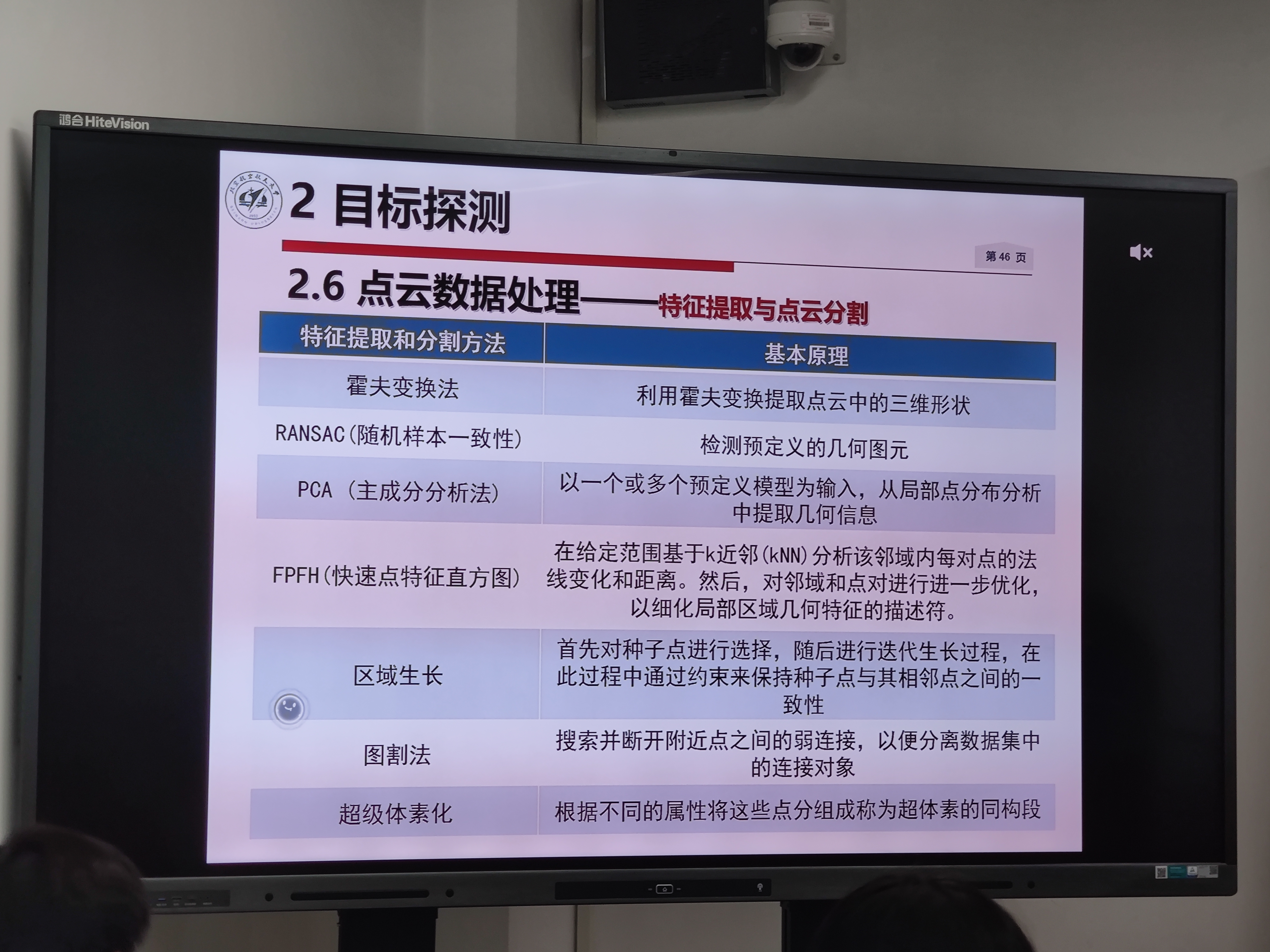
点云特征提取——全局特征or局部特征
点云分割——空间几何与纹理特征
点云配准——通过计算得到坐标变换,在地基雷达的使用中比较多
点云滤波——基于统计
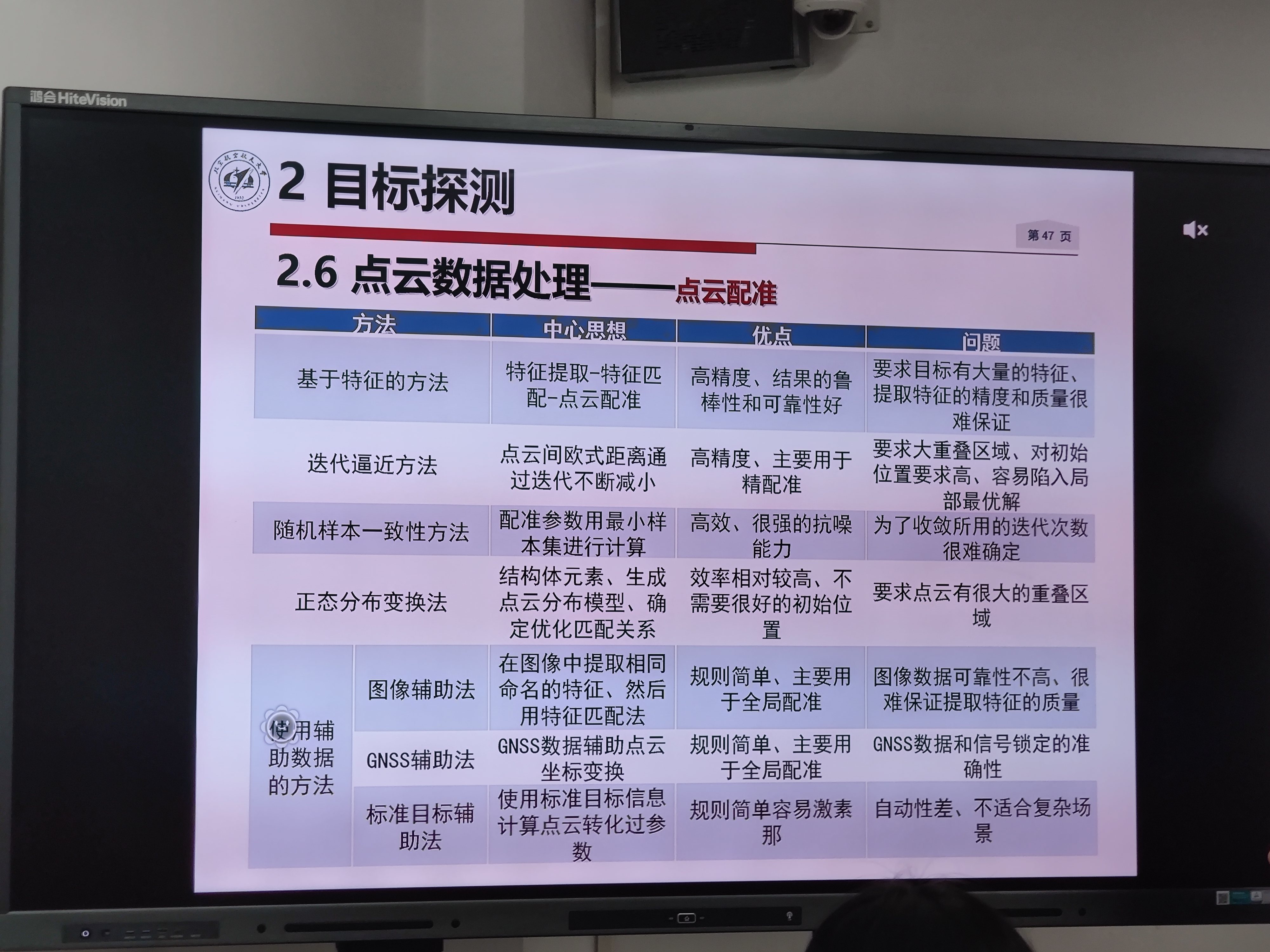
点云与图像配准——基于区域信息或者基于特征信息
概述-激光雷达
- LiDAR和RADAR区别
| 项目 | LiDAR | RADAR | 备注 |
|---|---|---|---|
| 简称 | Light Detection and Ranging | Radio Detection and Ranging | |
| 信息 | 三维方位角 | 一维 | |
| 信号特性 | 激光发散角小(°,小三个数量级) | 旁瓣多,指向性不好 |
- 激光雷达原理
| 简称 | 内容 | 备注 |
|---|---|---|
| 离散型激光雷达 | ||
| 全波型激光雷达 | ||
| 硬目标激光雷达 | ||
| 软目标激光雷达 | 水,大气, | |
| TOF | Time of Light,利用光速进行测距,常用于车载场景,精度较低但便宜 | 光速,导致计时器精度要求很高;不同反射率相应不同 |
- 常见激光波长:
| 波长nm | 特点 | 常见应用场景 |
|---|---|---|
| 1550 | 光纤(Si)传播损耗最低 | 主流(人眼响应更低,更不容易伤害人眼) |
| 1064 | 大气传播损耗最低 | 激光器常用 |
| 分界 | 在这之上都很贵了(InSn) | 在这之下都是Si,便宜 |
| 905 | 便宜,性能差 | 无人驾驶汽车常用 |
| 808 | 大气传播损耗最低 | 空中激光雷达常用 |
| 532 | 水中传播损耗最低 | 船舶激光雷达常用 |
- 激光雷达数据结构
| 类型 | 内容 | 备注 |
|---|---|---|
| 测距 | R,theta_1,theta_2 | |
| INS | theta_a,theta_b,theta_c | |
| GPS | x,y,z | |
| CCD | x,y,RGB |
第三章
大气传输理论
气溶胶分子的吸收与散射
| 散射分类 | 粒子大小 | 备注 |
|---|---|---|
| 瑞利散射 | \(\frac{2\pi}{\lambda}<1\) | |
| 米散射 | \(\frac{2\pi}{\lambda}>1\) |
强度矫正理论与方法
仪器特性——大气特性——几何特性
系统因子矫正——大气因子矫正——距离和角度因子矫正
角度矫正
BRDF(Bidirectional Reflectance Distribution Function, 双向反射分布函数)
\(P_r = F(f,P_t,R)\)
第五章
地面分割
| 方案 | 内容 | 备注 |
|---|---|---|
| 栅格 | 计算平均高度,密度进行几何特征判断 | 常用,快并且计算量少 |
| 分类器 | 以栅格为基础 | |
| 模型 | 将路面看作平面 | 不适用于坡地丘陵等复杂地形 |
点云聚类
| 方案 | 内容 | 备注 |
|---|---|---|
| 层次 | 按照距离 | 简单,球体,对init敏感 |
| 划分 | KNN | 形状自由,n无需定义,但是复杂度高 |
| 密度 | 距离半径&最少容纳点 | 形状自由,n无需定义,不能很好反应数据集变化的密度 |
| 网格 | 速度快,但依赖于网格大小 |
目标识别
| 方案 | 内容 | 备注 |
|---|---|---|
| ML | SVM | |
| DL | 卷积,学习点云的特征 | |
| 多模态融合 |
多模型识别——#TODO
目标跟踪
| 方案 | 内容 | 备注 |
|---|---|---|
| 预设模式 | 卡尔曼滤波 | |
| 状态估计 |
定位
GPS
SLAM
Scan Matching骚猫匹配方法,对当前已经构建的高精度地图要求较高
第六章
载荷平台
机载平台,星载平台,车载平台
DSM,DEM,DOM #TODO 区别?判断题
P1 L1对比
第七章 森林激光雷达
LAI叶面积指数:单位土地面积上植物叶片总买诺记占土地面积的倍数
没有激光雷达,如何测量LAI?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号