Prj2:智能移动物体监测计数拍照记录设备
一、所需硬件:
STM32F103C8T6 / STM32F4。
OV2640 摄像头。
W25Q128 存储。
HC-SR501 人体红外感应模块。
蜂鸣器。
二、接线。

三、程序编写。
驱动代码编写。github使用。stm32 cubemx连接ov2640。ChatGPT对话开源。
Arduino Uno + 红外传感器HC-SR501 + 蜂鸣器 + 蓝牙模块返回最新数据:
1 #include <EEPROM.h> // 引入EEPROM库 2 #include <SoftwareSerial.h> 3 4 SoftwareSerial bluetooth(0, 1); // 设置蓝牙模块的软串口引脚 5 // 红外传感器信号引脚 6 const int irSensorPin = 7; 7 8 //红外传感器输出信号 9 bool irSensorOutput; 10 const int buzzerPin = 3; // 蜂鸣器的引脚 11 int motionCnt = 0; // 存储移动物体的计数值 12 13 void setup() { 14 // 开启串口通信 15 Serial.begin(9600); 16 bluetooth.begin(9600); // 初始化蓝牙软串口通信 17 // 设置红外人体感应模块的引脚为输入 18 pinMode(irSensorPin, INPUT); 19 Serial.println("irSensor ready!"); 20 Serial.println("Bluetooth ready!"); 21 // bluetooth.println("Bluetooth ready!"); 22 motionCnt = EEPROM.read(0); // 从EEPROM中读取计数值 23 24 } 25 26 void loop() { 27 // 读取红外人体感应模块的输出信号 28 irSensorOutput = digitalRead(irSensorPin); 29 30 // 打印检测结果 31 if (irSensorOutput == HIGH) { 32 motionCnt++; // 计数值自增1 33 Serial.print("Motion detected! "); 34 Serial.println(motionCnt); 35 pinMode(buzzerPin, OUTPUT); 36 37 if (motionCnt > 1000) { 38 Serial.println("Max 1000, back to zero"); 39 motionCnt = 0; 40 } 41 EEPROM.write(0, motionCnt); // 将计数值写入EEPROM 42 // bluetooth.print("OK: "); // 发送"OK"给蓝牙设备 43 // bluetooth.println(motionCnt); 44 delay(1000); 45 } else { 46 pinMode(buzzerPin, INPUT); 47 // digitalWrite(buzzerPin, LOW); // 关闭蜂鸣器 48 } 49 // 等待2s 50 delay(1000); 51 }
注意事项:
#1在Arduino的EEPROM中,每个字节都有一个独特的地址(从0到EEPROM大小-1)。EEPROM.read()函数用于读取指定地址上存储的数据,并将其转换为字节类型。
EEPROM的大小取决于Arduino板子的型号。例如,在Arduino Uno和Nano上,EEPROM的大小为1024字节,因此可以使用地址范围从0到1023的所有地址。
如果你想要读取或写入EEPROM中的数据,你需要了解你所使用的Arduino板子的EEPROM大小,并确保你所使用的地址不超出范围。
#2上电后蜂鸣器一直会响,无论高低电平,这时把蜂鸣器引脚设为输入模式(在此是无效模式,可暂停响声)pinMode(buzzerPin, INPUT);。
#3由于Arduino Uno板子只有一组硬串口(RX和TX引脚),当硬串口已经被占用时,不能再使用Serial.begin()函数进行初始化。
在这种情况下,可以使用SoftwareSerial库来创建一个软串口来与蓝牙模块进行通信。
请注意,使用软串口可能会导致通信速度较慢,因此可以尝试调整波特率和延时时间来优化通信效果。
作为从机的蓝牙模块也可以直接返回数据。首先,你需要确保你的蓝牙模块支持透明传输模式(Transparent Transmission Mode)。
在透明传输模式下,蓝牙模块会将从串口接收到的数据直接发送到主机设备,同时将主机设备发送的数据直接转发到串口输出。
STM32F103C8T6连接红外传感器HC-SR501:
1 #include "stm32f4xx_hal.h" 2 3 #define PIR_GPIO_PORT GPIOA 4 #define PIR_GPIO_PIN GPIO_PIN_0 5 6 void SystemClock_Config(void); 7 static void MX_GPIO_Init(void); 8 9 int main(void) 10 { 11 HAL_Init(); 12 SystemClock_Config(); 13 MX_GPIO_Init(); 14 15 while (1) 16 { 17 if(HAL_GPIO_ReadPin(PIR_GPIO_PORT, PIR_GPIO_PIN) == GPIO_PIN_SET) 18 { 19 // 运动检测到 20 // 在此处添加你的逻辑代码 21 } 22 else 23 { 24 // 没有运动检测到 25 // 在此处添加你的逻辑代码 26 } 27 } 28 } 29 30 void SystemClock_Config(void) 31 { 32 RCC_OscInitTypeDef RCC_OscInitStruct = {0}; 33 RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; 34 35 __HAL_RCC_PWR_CLK_ENABLE(); 36 __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); 37 38 RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI; 39 RCC_OscInitStruct.HSIState = RCC_HSI_ON; 40 RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; 41 RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; 42 if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) 43 { 44 Error_Handler(); 45 } 46 47 RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK 48 | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2; 49 RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI; 50 RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; 51 RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; 52 RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; 53 if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK) 54 { 55 Error_Handler(); 56 } 57 } 58 59 static void MX_GPIO_Init(void) 60 { 61 GPIO_InitTypeDef GPIO_InitStruct = {0}; 62 63 __HAL_RCC_GPIOA_CLK_ENABLE(); 64 65 GPIO_InitStruct.Pin = PIR_GPIO_PIN; 66 GPIO_InitStruct.Mode = GPIO_MODE_INPUT; 67 GPIO_InitStruct.Pull = GPIO_PULLDOWN; 68 HAL_GPIO_Init(PIR_GPIO_PORT, &GPIO_InitStruct); 69 }
搞清楚C8T6调用程序和驱动程序的区别,理解上述代码。
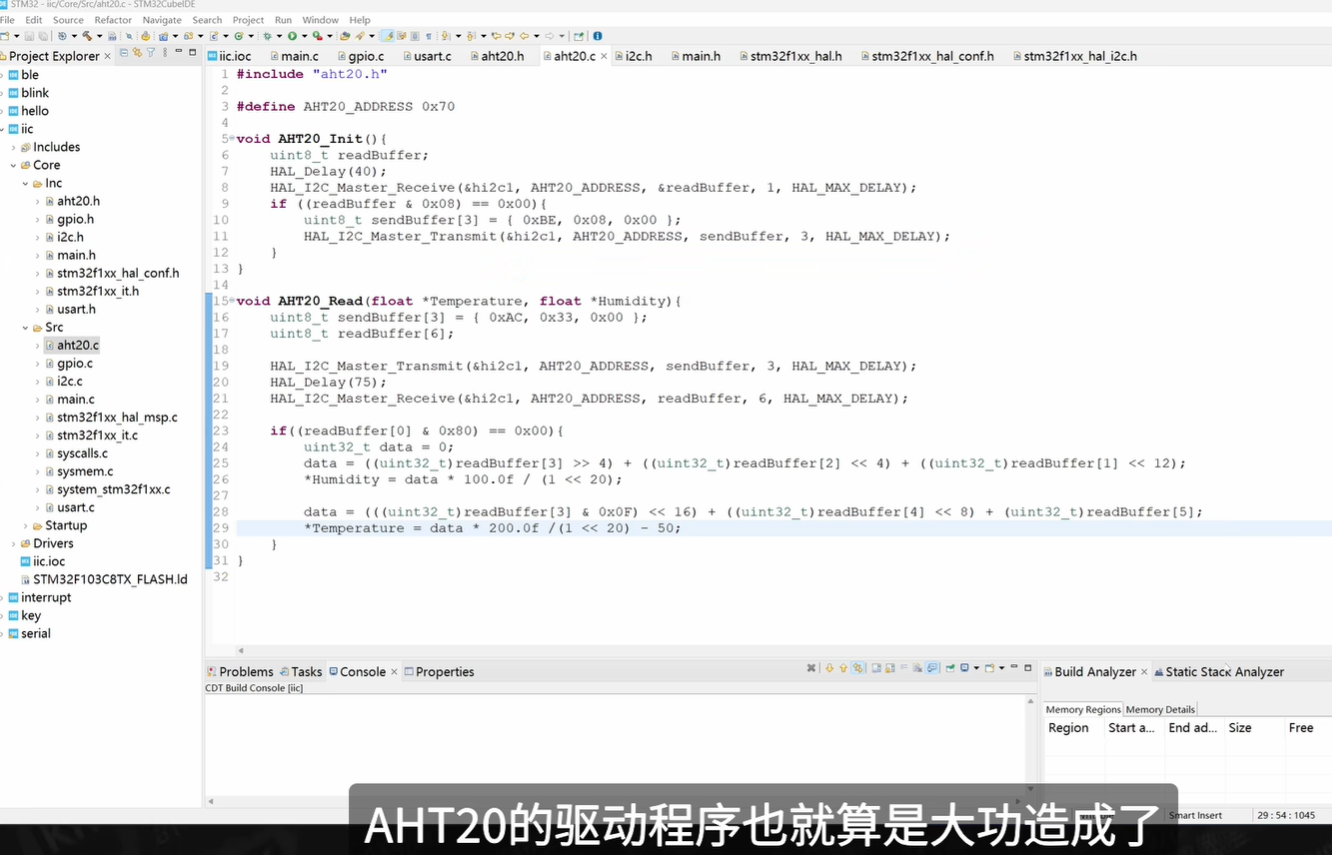
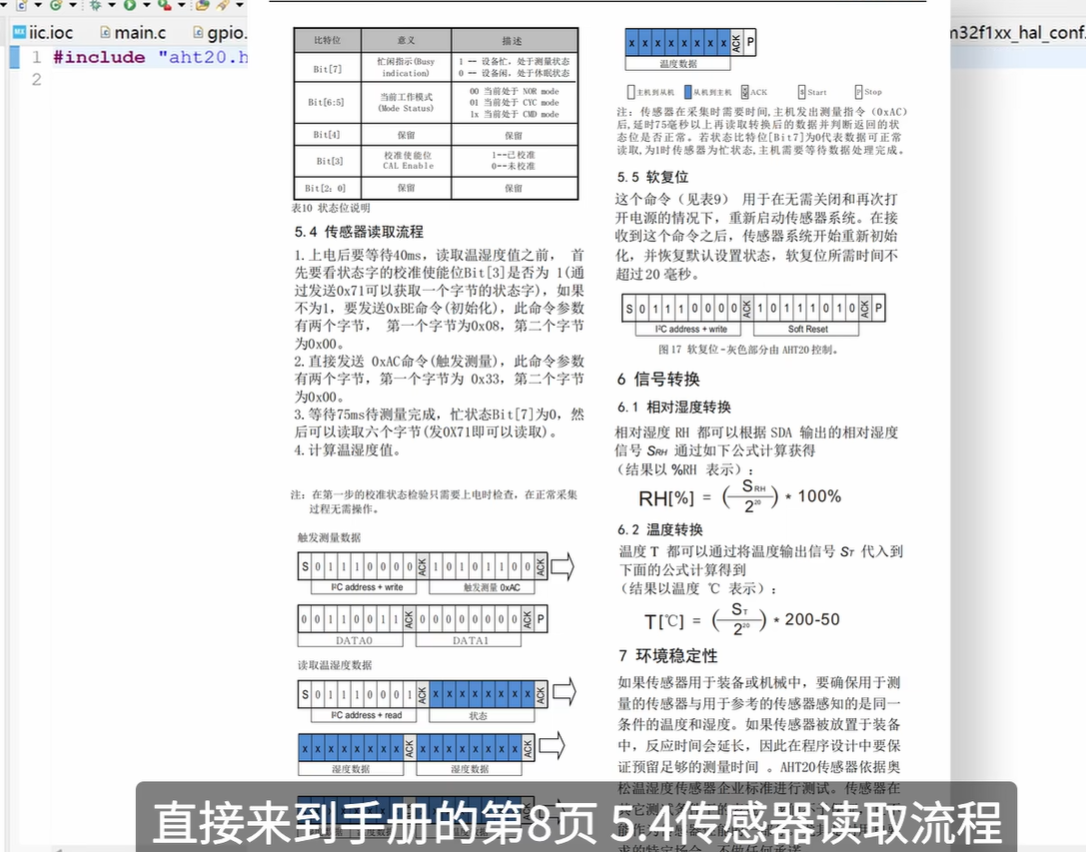
驱动程序实例(初始化以及读取AHT20温湿度传感器。)用什么传感器就对应数据手册写驱动程序
连接W25Q128。
连接OV2640。
这里C8T6没有DCMI接口。可能换为STM32F4含驱动源码板。
参考链接:
https://www.bilibili.com/video/BV1ae41167E6/?spm_id_from=333.337.search-card.all.click&vd_source=1c8d8b3756b33ac6eb1115e22c4073cd。(点亮OV2640摄像头的完整教程)
https://github.com/SimpleMethod/STM32-OV2640/。
https://zhuanlan.zhihu.com/p/669697776。
驱动源码:https://pan.baidu.com/s/19Tm1-7rWh6qeOVImOoBbXQ。
(简化版本):
1.移动物体监测。(serial.keysking.com,Web串口调试工具)
2.监测到高电平后每隔1秒,将时间和数据写入文件(高电平一直蜂鸣)。低电平不发数据。
