网络流
(3-13至3-14重修)
什么是网络流
网络流是指在网络(或者流网络, Flow Network )中的流。
网络
网络是指一个有向图 \(G=(V,E)\)。
每条边 \((u,v)\in E\) 都有一个权值 \(c(u,v)\),称之为容量(Capacity),当 \((u,v)\notin E\) 时有 \(c(u,v)=0\)。
其中有两个特殊的点:源点(Source)\(s\in V\) 和汇点(Sink)\(t\in V,(s\neq t)\)。
流
设 \(f(u,v)\) 定义在二元组 \((u\in V,v\in V)\) 上的实数函数且满足
- 容量限制:对于每条边,流经该边的流量不得超过该边的容量,即,\(f(u,v)\leq c(u,v)\)
- 斜对称性:每条边的流量与其相反边的流量之和为 0,即 \(f(u,v)=-f(v,u)\)
- 流守恒性:从源点流出的流量等于汇点流入的流量,即 \(\forall x\in V - \lbrace s,t \rbrace , \sum_{(u,x) \in E} f(u,x) = \sum_{(x,v) \in E} f(x,v)\)
那么 \(f\) 称为网络 \(G\) 的流函数。对于 \((u,v)\in E\),\(f(u,v)\) 称为边的流量,\(c(u,v)-f(u,v)\) 称为边的剩余容量。整个网络的流量为 \(\sum_{(s,v)\in E}f(s,v)\),即从源点发出的所有流量之和。
一般而言也可以把网络流理解为整个图的流量。而这个流量必满足上述三个性质。
流函数的完整定义为
反向边
反向边是网络流中很重要的一类边。
一般的时候,在题目给定的流网络中是不包含有关反向边的信息的,我们画图的时候也一般不将反向边画出来。
但是,反向边可以利用流网络的一些性质,通过对其流量进行操作,使得我们的子程序可以经由其进行反悔的操作。
建立反向边的时候可以使用一些小trick。
我们如果使用邻接表(或称链式前向星)来建图的话,可以选择同时建正向边和反向边,并使边的编号从0开始,从而可以通过使用异或操作来访问当前边的反向边。
网络流的常见问题
网络流问题中常见的有以下三种:最大流,最小割,费用流。
解决网络流问题的难点不是算法或者代码,而是建图。对于大多数的网络流题目,我们需要仔细分辨琢磨才可以知道如何将问题转换为网络流这几种问题的其中一种或几种,并将题目中的限制用边/点的限制体现出来。
最大流
简介
对于一个给定的网络,其合法的流函数其实有很多。其中使得整个网络的流量最大的流函数被称为网络的最大流。
求解一个网络的最大流其实有很多用处,例如可以将二分图的最大匹配问题转化为求解最大流。
求解最大流的算法有很多种,比如Ford-Fulkerson增广路算法、Push-Relable预流推进算法等等。
实际上,最常用的还是Ford-Fulkerson增广路算法中的EK和Dinic两种。
Ford-Fulkerson 增广路算法
该方法通过寻找增广路来更新最大流,有EK,dinic,SAP,ISAP等主流算法。
求解最大流之前,我们先认识一些概念。
残量网络
首先我们介绍一下一条边的剩余容量 \(c_f(u,v)\)(Residual Capacity),它表示的是这条边的容量与流量之差,即 \(c_f(u,v) = c(u,v) - f(u,v)\)。
对于流函数 \(f\),残存网络 \(G_f\)(Residual Network)是网络 \(G\) 中所有结点和剩余容量大于 0 的边构成的子图。形式化的定义,即 \(G_f = (V_f = V,E_f = \lbrace(u,v) \in E,c_f(u,v) > 0 \rbrace)\)。
注意,剩余容量大于 0 的边可能不在原图 \(G\) 中(根据容量、剩余容量的定义以及流函数的斜对称性得到)。可以理解为,残量网络中包括了那些还剩了流量空间的边构成的图,也包括虚边(即反向边)。
增广路
在原图 \(G\) 中若一条从源点到汇点的路径上所有边的剩余容量都大于 0,这条路被称为增广路(Augmenting Path)。
或者说,在残存网络 \(G_f\) 中,一条从源点到汇点的路径被称为增广路。如图:
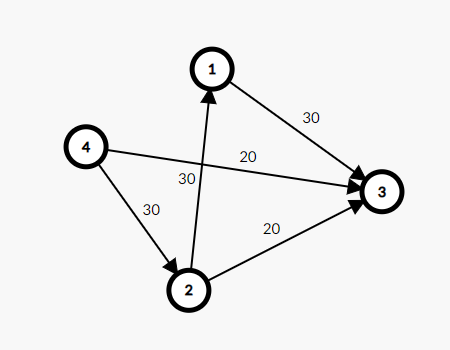
我们从 \(4\) 到 \(3\),肯定可以先从流量为 \(20\) 的这条边先走。那么这条边就被走掉了,不能再选,总的流量为 \(20\)(现在)。然后我们可以这样选择:
-
\(4 \to 2 \to 3\) 这条 增广路 的总流量为 \(20\)。到 \(2\) 的时候还是 \(30\),到 \(3\) 了就只有 \(20\) 了。
-
\(4 \to 2 \to 1 \to 3\) 这样子我们就很好的保留了 \(30\) 的流量。
所以我们这张图的最大流就应该是 \(20 + 30 = 50\)。
Edmonds-Karp 动能算法
这个算法很简单,就是BFS找增广路,然后对其进行增广,直到图上再也没有增广路了为止。
我们不用管我们找到的增广路的正确性,毕竟如果我们找到了一条更优的路径的话可以通过之前经过的反向边进行反悔。这也就意味着,我们每次需要BFS的边鸡是包括反向边的。
在具体实现的时候,我们每一次找到增广路的时候,记录下这条路径上所有的最小流量 \(minf\) ,那么整个图的流量就增加了 \(minf\)。同时我们给这条路径上的所有边的反向边都加上 \(minf\) 的容量,以便将来反悔。
EK 算法的时间复杂度为 \(O(nm^2)\)(其中 \(n\) 为点数,\(m\) 为边数)。
其效率还有很大提升空间,但实际情况下不一定能跑满,应付 \(10^3 \sim 10^4\) 大小的图应该足够了。
参考代码:
#include<bits/stdc++.h>
using namespace std;
const int N = 1010, M = 20010, INF = 1e8;
int n, m, S, T;
int h[N], e[M], f[M], ne[M], idx;
int q[N], d[N], pre[N];
bool st[N];
void add(int a, int b, int c)
{
e[idx] = b, f[idx] = c, ne[idx] = h[a], h[a] = idx++;
e[idx] = a, f[idx] = 0, ne[idx] = h[b], h[b] = idx++;
}
bool bfs()
{
int hh = 0, tt = 0;
memset(st, false, sizeof(st));
q[0] = S, st[S] = true, d[S] = INF;
while(hh <= tt)
{
int t = q[hh++];
for(int i = h[t]; ~i; i = ne[i])
{
int ver = e[i];
if(!st[ver] && f[i])
{
st[ver] = true;
d[ver] = min(d[t], f[i]);
pre[ver] = i;
if(ver == T) return true;
q[++tt] = ver;
}
}
}
return false;
}
int EK()
{
int r = 0;
while(bfs())
{
r += d[T];
for(int i = T; i != S; i = e[pre[i] ^ 1])
f[pre[i]] -= d[T], f[pre[i] ^ 1] += d[T];
}
return r;
}
int main()
{
scanf("%d%d%d%d", &n, &m, &S, &T);
memset(h, -1, sizeof(h));
while(m--)
{
int a, b, c;
scanf("%d%d%d", &a, &b, &c);
add(a, b, c);
}
printf("%d\n", EK());
return 0;
}
Dinic 算法
EK 算法每一次遍历残量网络的时候只能最多找到一条增广路,但很可能我们的子程序为此而遍历了整个残量网络。这里还有很大的优化空间。
Dinic 算法的过程是这样的:每次增广前,我们先用 BFS 来将图分层。设源点的层数为 \(0\),那么一个点的层数便是它离源点的最近距离。
通过分层,我们可以干两件事情:
- 如果不存在到汇点的增广路(即汇点的层数不存在),我们即可停止增广。
- 确保我们找到的增广路是最短的。(原因见下文)
接下来是 DFS 找增广路的过程。
我们每次找增广路的时候,都只找比当前点层数多 \(1\) 的点进行增广(这样就可以确保我们找到的增广路是最短的)。
Dinic 算法会不断重复这两个过程,直到没有增广路了为止。
Dinic 算法有两个优化:
- 多路增广:每次找到一条增广路的时候,如果残余流量没有用完怎么办呢?我们可以利用残余部分流量,再找出一条增广路。这样就可以在一次 DFS 中找出多条增广路,大大提高了算法的效率。
- 当前弧优化:如果一条边已经被增广过,那么它就没有可能被增广第二次。那么,我们下一次进行增广的时候,就可以不必再走那些已经被增广过的边。
Dinic 算法的时间复杂度是 \(O(n^2m)\) 级别的,但实际上其实跑不满这个上限。
Dinic算法可以说是算法实现难易程度与时间复杂度较为平衡的一个算法,可以应对 \(10^4 \sim 10^5\)级别的图。
特别的,Dinic算法在求解二分图最大匹配问题的时候的时间复杂度是 \(O(m\sqrt{n})\) 级别的,实际情况下则比这更优。
时间复杂度证明搬自 OI-Wiki。
时间复杂度
设点数为 \(n\),边数为 \(m\),那么 Dinic 算法的时间复杂度(在应用上面两个优化的前提下)是 \(O(n^2m)\),在稀疏图上效率和 EK 算法相当,但在稠密图上效率要比 EK 算法高很多。
首先考虑单轮增广的过程。在应用了当前弧优化的前提下,对于每个点,我们维护下一条可以增广的边,而当前弧最多变化 \(m\) 次,从而单轮增广的最坏时间复杂度为 \(O(nm)\)。
接下来我们证明,最多只需 \(n-1\) 轮增广即可得到最大流。
我们先回顾下 Dinic 的增广过程。对于每个点,Dinic 只会找比该点层数多 \(1\) 的点进行增广。
首先容易发现,对于图上的每个点,一轮增广后其层数一定不会减小。而对于汇点 \(t\),情况会特殊一些,其层数在一轮增广后一定增大。
对于后者,我们考虑用反证法证明。如果 \(t\) 的层数在一轮增广后不变,则意味着在上一次增广中,仍然存在着一条从 \(s\) 到 \(t\) 的增广路,且该增广路上相邻两点间的层数差为 \(1\)。这条增广路应该在上一次增广过程中就被增广了,这就出现了矛盾。
从而我们证明了汇点的层数在一轮增广后一定增大,即增广过程最多进行 \(n-1\) 次。
综上 Dinic 的最坏时间复杂度为 \(O(n^{2}m)\)。事实上在一般的网络上,Dinic 算法往往达不到这个上界。
特别地,在求解二分图最大匹配问题时,Dinic 算法的时间复杂度是 \(O(m\sqrt{n})\)。接下来我们将给出证明。
首先我们来简单归纳下求解二分图最大匹配问题时,建立的网络的特点。我们发现这个网络中,所有边的流量均为 \(1\),且除了源点和汇点外的所有点,都满足入边最多只有一条,或出边最多只有一条。我们称这样的网络为单位网络。
对于单位网络,一轮增广的时间复杂度为 \(O(m)\),因为每条边只会被考虑最多一次。
接下来我们试着求出增广轮数的上界。假设我们已经先完成了前 \(\sqrt{n}\) 轮增广,因为汇点的层数在每次增广后均严格增加,因此所有长度不超过 \(\sqrt{n}\) 的增广路都已经在之前的增广过程中被增广。设前 \(\sqrt{n}\) 轮增广后,网络的流量为 \(f\),而整个网络的最大流为 \(f'\),设两者间的差值 \(d=f'-f\)。
因为网络上所有边的流量均为 \(1\),所以我们还需要找到 \(d\) 条增广路才能找到网络最大流。又因为单位网络的特点,这些增广路不会在源点和汇点以外的点相交。因此这些增广路至少经过了 \(d\sqrt{n}\) 个点(每条增广路的长度至少为 \(\sqrt{n}\)),且不能超过 \(n\) 个点。因此残量网络上最多还存在 \(\sqrt{n}\) 条增广路。也即最多还需增广 \(\sqrt{n}\) 轮。
综上,对于包含二分图最大匹配在内的单位网络,Dinic 算法可以在 \(O(m\sqrt{n})\) 的时间内求出其最大流。
参考代码:
#include<bits/stdc++.h>
using namespace std;
const int N = 10010, M = 200010, INF = 1e8;
int n, m, S, T;
int h[N], e[M], f[M], ne[M], idx;
int q[N], d[N], cur[N];
void add(int a, int b, int c)
{
e[idx] = b, f[idx] = c, ne[idx] = h[a], h[a] = idx++;
e[idx] = a, f[idx] = 0, ne[idx] = h[b], h[b] = idx++;
}
bool bfs()
{
int hh = 0, tt = 0;
memset(d, -1, sizeof(d));
q[0] = S, d[S] = 0, cur[S] = h[S];
while(hh <= tt)
{
int t = q[hh++];
for(int i = h[t]; ~i; i = ne[i])
{
int ver = e[i];
if(d[ver] == -1 && f[i])
{
d[ver] = d[t] + 1;
cur[ver] = h[ver];
if(ver == T) return true;
q[++tt] = ver;
}
}
}
return false;
}
int find(int u, int limit)
{
if(u == T) return limit;
int flow = 0;
for(int i = cur[u]; ~i && flow < limit; i = ne[i])
{
cur[u] = i; // 当前弧优化
int ver = e[i];
if(d[ver] == d[u] + 1 && f[i])
{
int t = find(ver, min(f[i], limit - flow));
if(!t) d[ver] = -1;
f[i] -= t, f[i ^ 1] += t, flow += t;
}
}
return flow;
}
int dinic()
{
int r = 0, flow;
while(bfs()) while(flow = find(S, INF)) r += flow;
return r;
}
int main()
{
scanf("%d%d%d%d", &n, &m, &S, &T);
memset(h, -1, sizeof(h));
while(m--)
{
int a, b, c;
scanf("%d%d%d", &a, &b, &c);
add(a, b, c);
}
printf("%d\n", dinic());
return 0;
}
最小割
简介
对于一个给定的网络,我们删去网络中的一个边集,使得源点与汇点不连通,这个被删去的边集就是这张图的一个割。在所有的割中,边集的容量和最小的被称为最小割。
最大流最小割定理
任何一个网络的最大流量等于最小割中边的容量值和。
证明
我们如果回想一下最大流算法走完之后的结果。
对于每一条从源点到汇点的流量为正的路径,我们都能找到至少一条容量跑满的边。
这些边的容量之和就是我们最终得到的最大流。
我们考虑将这些边删去。
那么我们如果对剩下的边跑最大流算法的话,我们得到的最大流将会是0,也就意味着源点将不再与汇点直接连通。
这些跑满的边构成的边集就满足了我们对割的定义。
实现
所以说,我们完全可以用求解最大流的算法来求解最小割问题。
费用流
简介
给定一个网络 \(G=(V,E)\),每条边除了有容量限制 \(c(u,v)\),还有一个单位流量的费用 \(w(u,v)\)。
当 \((u,v)\) 的流量为 \(f(u,v)\) 时,需要花费 \(f(u,v)\times w(u,v)\) 的费用。
\(w\) 也满足斜对称性,即 \(w(u,v)=-w(v,u)\)。
则该网络中总花费最小的最大流称为最小费用最大流,即在最大化 \(\sum_{(s,v)\in E}f(s,v)\) 的前提下最小化 \(\sum_{(u,v)\in E}f(u,v)\times w(u,v)\)。
最小费用最大流问题与带权二分图最大匹配问题的关系就和最大流问题和二分图最大匹配问题的关系类似,这就意味着我们可以使用求解费用流问题的算法来求解带权二分图最大匹配问题。
SSP 算法
SSP(Successive Shortest Path)算法是一个贪心的算法。它的思路是每次寻找单位费用最小的增广路进行增广,直到图上不存在增广路为止。
如果图上存在单位费用为负的圈,SSP 算法正确无法求出该网络的最小费用最大流。此时需要先使用消圈算法消去图上的负圈。
证明搬自 OI-Wiki。
证明
我们考虑使用数学归纳法和反证法来证明 SSP 算法的正确性。
设流量为 \(i\) 的时候最小费用为 \(f_i\)。我们假设最初的网络上 没有负圈,这种情况下 \(f_0=0\)。
假设用 SSP 算法求出的 \(f_i\) 是最小费用,我们在 \(f_i\) 的基础上,找到一条最短的增广路,从而求出 \(f_{i+1}\)。这时 \(f_{i+1}-f_i\) 是这条最短增广路的长度。
假设存在更小的 \(f_{i+1}\),设它为 \(f_{i+1}'\)。因为 \(f_{i+1}-f_i\) 已经是最短增广路了,所以 \(f_{i+1}'-f_i\) 一定对应一个经过 至少一个负圈 的增广路。
这时候矛盾就出现了:既然存在一条经过至少一个负圈的增广路,那么 \(f_i\) 就不是最小费用了。因为只要给这个负圈添加流量,就可以在不增加 \(s\) 流出的流量的前提下,使 \(f_i\) 对应的费用更小。
综上,SSP 算法可以正确求出无负圈网络的最小费用最大流。
时间复杂度
如果使用 Bellman-Ford 算法求解最短路,每次找增广路的时间复杂度为 \(O(nm)\)。设该网络的最大流为 \(f\),则最坏时间复杂度为 \(O(nmf)\)。事实上,这个时间复杂度是伪多项式的。
实现
只需将 EK 算法或 Dinic 算法中找增广路的过程,替换为用最短路算法寻找单位费用最小的增广路即可。
基于EK算法的实现:
#include<bits/stdc++.h>
using namespace std;
const int N = 5010, M = 100010, INF = 1e8;
int n, m, S, T;
int h[N], e[M], f[M], w[M], ne[M], idx;
int q[N], d[N], pre[N], incf[N];
bool st[N];
void add(int a, int b, int c, int d)
{
e[idx] = b, f[idx] = c, w[idx] = d, ne[idx] = h[a], h[a] = idx++;
e[idx] = a, f[idx] = 0, w[idx] = -d, ne[idx] = h[b], h[b] = idx++;
}
bool spfa()
{
int hh = 0, tt = 1;
memset(d, 0x3f, sizeof(d));
memset(incf, 0, sizeof(incf));
q[0] = S, d[S] = 0, incf[S] = INF;
while(hh != tt)
{
int t = q[hh++];
if(hh == N) hh = 0;
st[t] = false;
for(int i = h[t]; ~i; i = ne[i])
{
int ver = e[i];
if(f[i] && d[ver] > d[t] + w[i])
{
d[ver] = d[t] + w[i];
pre[ver] = i;
incf[ver] = min(f[i], incf[t]);
if(!st[ver])
{
q[tt++] = ver;
if(tt == N) tt = 0;
st[ver] = true;
}
}
}
}
return incf[T] > 0;
}
void EK(int &flow, int &cost)
{
flow = cost = 0;
while(spfa())
{
int t = incf[T];
flow += t, cost += t * d[T];
for(int i = T; i != S; i = e[pre[i] ^ 1])
{
f[pre[i]] -= t;
f[pre[i] ^ 1] += t;
}
}
}
int main()
{
scanf("%d%d%d%d", &n, &m, &S, &T);
memset(h, -1, sizeof(h));
while(m--)
{
int a, b, c, d;
scanf("%d%d%d%d", &a, &b, &c, &d);
add(a, b, c, d);
}
int flow, cost;
EK(flow, cost);
printf("%d %d\n", flow, cost);
return 0;
}
基于 Dinic 算法的实现:
#include<bits/stdc++.h>
using namespace std;
const int N = 5010, M = 200010, INF = 1e16;
int n, m, S, T;
int h[N], e[M], f[M], w[M], ne[M], idx;
int q[N], d[N], cur[N], pre[N], incf[N];
bool st[N];
void add(int a, int b, int c, int d)
{
e[idx] = b, f[idx] = c, w[idx] = d, ne[idx] = h[a], h[a] = idx++;
e[idx] = a, f[idx] = 0, w[idx] = -d, ne[idx] = h[b], h[b] = idx++;
}
bool spfa()
{
int hh = 0, tt = 1;
memset(d, 0x3f, sizeof(d));
memset(incf, 0, sizeof(incf));
memcpy(cur, h, sizeof(h));
q[0] = S, d[S] = 0, incf[S] = INF;
while(hh != tt)
{
int t = q[hh++];
if(hh == N)hh = 0;
st[t] = false;
for(int i = h[t]; ~i; i = ne[i])
{
int ver = e[i];
if((f[i]) && (d[ver] > d[t] + w[i]))
{
d[ver] = d[t] + w[i];
pre[ver] = i;
incf[ver] = min(f[i], incf[t]);
if(!st[ver])
{
q[tt++] = ver;
if(tt == N)tt = 0;
st[ver] = true;
}
}
}
}
return incf[T] > 0;
}
int dfs(int u, int lim)
{
if(u == T)return lim;
int flow = 0;
for(int i = cur[u]; ~i && flow < lim; i = ne[i])
{
cur[u] = i;
int ver = e[i];
if((d[ver] == d[u] + 1) && (f[i]))
{
int t = dfs(ver, min(f[i], lim - flow));
if(!t)d[ver] = -1;
f[i] -= t, f[i ^ 1] += t, flow += t;
}
}
return flow;
}
void dinic(int &flow, int &cost)
{
flow = cost = 0;
int r = 0;
while(spfa())
{
while(r = dfs(S, INF))
{
flow = r;
cost += r * d[T];
}
}
}
int main()
{
scanf("%d%d%d%d", &n, &m, &S, &T);
memset(h, -1, sizeof(h));
for(int i = 1; i <= m; i++)
{
int a, b, c, d;
scanf("%d%d%d%d", &a, &b, &c, &d);
add(a, b, c, d);
}
int flow, cost;
dinic(flow, cost);
printf("%d %d\n", flow, cost);
return 0;
}
(貌似寄了,求调)
常见技巧
拆点
我们经常需要应对一些对点的访问次数或者流量上限有限制的题目。
或者我们有时候需要处理多类点的匹配问题,例如某一个USACO的题目。
对于这种问题,我们可以把一个点拆成两个点,并用一条边连接这两个点。
如果我们对点的最大流量有限制,那么我们就可以将这条边的流量设置为原图中对应的点的最大流量。
如果我们走过点的时候有费用,那么我们就把费用加到边上。
等等等等。
以刚才我们提到的题目为例。
这道题要求我们将食物、饮料与牛进行配对。
为了防止一头牛吃两顿饭,我们将代表牛的点拆成两个,中间连接一条容量为1的边,代表这个点只能被访问一次。
代码:
#include<bits/stdc++.h>
using namespace std;
const int N = 510, M = 200010, INF = 1e8;
int n, f, d;
int h[N], e[M], c[M], ne[M], idx;
int num[N];
int minn, s, t, minflow, maxflow, tot;
queue<int>q;
void add(int u, int v, int a)
{
e[++idx] = v, c[idx] = a, ne[idx] = h[u], h[u] = idx;
e[++idx] = u, c[idx] = 0, ne[idx] = h[v], h[v] = idx;
}
bool add_num()
{
while(!q.empty())q.pop();
for(int i = s; i <= t + n; i++)num[i] = -1;
num[s] = 1;
q.push(s);
while(!q.empty())
{
int now = q.front();
q.pop();
for(int i = h[now]; i; i = ne[i])
{
if(c[i] && num[e[i]] == -1)
{
num[e[i]] = num[now] + 1;
q.push(e[i]);
}
}
}
if(num[t] == -1)return false;
else return true;
}
int dfs(int u, int s)
{
if(u == t)
{
return s;
}
for(int i = h[u]; i; i = ne[i])
{
if(c[i] && num[u] + 1 == num[e[i]] && (minflow = dfs(e[i], min(s, c[i]))))
{
c[i] -= minflow;
c[i ^ 1] += minflow;
return minflow;
}
}
return 0;
}
void dinic()
{
while(add_num())
while((minn = dfs(1, INF)))
maxflow += minn;
}
int main()
{
scanf("%d%d%d", &n, &f, &d);
idx = 1;
s = 1;
t = 1 + f + n + d + 1;
for(int i = 1; i <= f; i++)add(s, 1 + i, 1);
for(int i = 1; i <= d; i++)add(1 + f + n + i, t, 1);
for(int i = 1; i <= n; i++)add(1 + f + i, 1 + f + n + d + 1 + i, 1);
for(int i = 1; i <= n; i++)
{
int dn, fn;
scanf("%d%d", &fn, &dn);
for(int q = 1; q <= fn; q++)
{
int fi;
scanf("%d", &fi);
add(1 + fi, 1 + f + i, 1);
}
for(int q = 1; q <= dn; q++)
{
int di;
scanf("%d", &di);
add(1 + f + n + d + 1 + i, 1 + f + n + di, 1);
}
}
dinic();
printf("%d\n", maxflow);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号