
RT-Thread 堆区大小设置
一、利用栈区的空间作为堆区
看过我之前的笔记的小伙伴都知道,以前我是通过申请栈区的空间使用的,感兴趣的小伙伴可以看我之前的笔记,RT-Thread移植到stm32。
在board.c文件文件中的代码如下所示:
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
#define RT_HEAP_SIZE 1024
static uint32_t rt_heap[RT_HEAP_SIZE]; // heap default size: 4K(1024 * 4)
RT_WEAK void *rt_heap_begin_get(void)
{
return rt_heap;
}
RT_WEAK void *rt_heap_end_get(void)
{
return rt_heap + RT_HEAP_SIZE;
}
#endif
从上面的代码中可以看出,申请了一个栈空间rt_heap数组,大小为4K。但是这样在使用RT-Thread堆内存的时候就不太友好了。缺点如下:
-
堆内存大小是固定的,使得RT-Thread系统没有最大化的利用STM32的内存空间。
-
在RT-Thread的堆内存中使用了相应的内存算法,容易造成内存碎片化。,所以应将栈剩余的空间全部用于堆内存使用,有关算法可以看RT-Thread内存管理。
-
发生堆栈溢出的时候,不利于问题的查找。
所以我们使用的时候,应该获取堆区与栈区的内存分界地址,以便于给RT-Thread的堆内存使用。
二、STM32内存知识
在获取堆内存与栈内存之前,我们需要简单的理解STM32的内存知识,如果想了解更详细的内容,可以看我之前的笔记,STM32内存知识。
- code:代码存储区,存放函数体的二进制代码
- Ro-data:只读数据存储区,存放字常量数据类型(如const类型)程序结束后有系统自动释放
- RW-data:初始化可读写变量的大小,程序结束后由系统自动释放。
- ZI-data:没有初始化的可读写变量大小,程序结束后由系统自动释放。
- heap:堆区,一般由程序员分配释放,若程序员不释放,程序结束时可能由OS释放。
- stack:栈区,由编译器自动分配释放,存放函数的参数值,局部变量的值等。
- RO Size:包含Code及RO Data,表示只读数据占用Flash空间的大小。
- RW Size:包含RW Data及ZI Data,表示运行时占用的RAM的大小。
- ROM Size包含Code,RO Data及RW Data,表示烧写程序所占用的Flash的大小。
-
STM32程序运行的流程。如下图所示:

-
栈向下生长,内存地址由高至低;堆向上,内存地址由低至高,堆栈之间没有固定的界限,如下图所示:
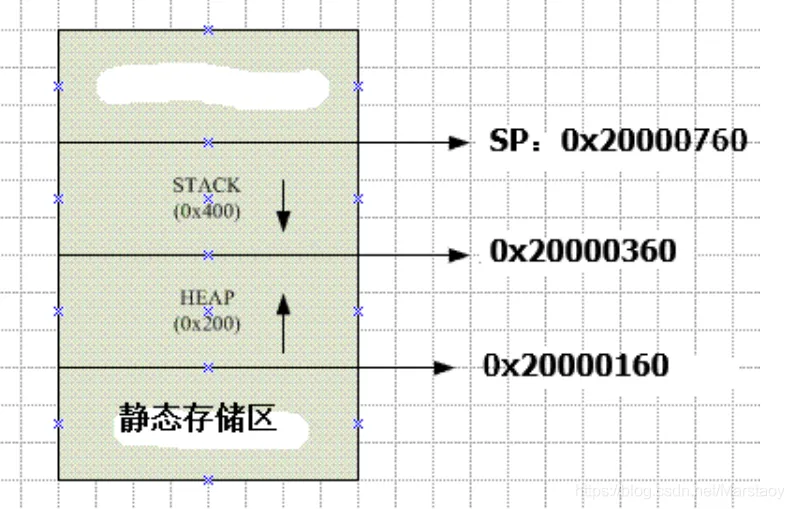
从上面两点可以看出来,RAM是包含堆区和栈区,而堆区与栈区没有明确的界限,所以内存中没有使用的栈空间都可以申请为堆内存。我们只需要找出栈空间接结束地址,也是ZI段和结束地址即可。
三、获取栈空间的结束地址
因为不同编译器的内存标识不一样,所以需要注意一下不同环境下的获取方式。
-
MDK环境下,栈结束地址的获取,如下所示:
extern unsigned char Image$$ER_IROM1$$Limit; // 获取RW段在FLASH中的加载地址 extern unsigned char Image$$RW_IRAM1$$Base; // 获取RW段在RAM中的运行地址 extern unsigned char Image$$RW_IRAM1$$RW$$Limit; // 获取RW段在RAM中的结束地址 extern unsigned char Image$$RW_IRAM1$$ZI$$Limit; // 获取ZI段在RAM中的结束地址所以在MDK中只需要使用Image$$RW_IRAM1$$ZI$$Limit链接便可获得栈空间的结束地址,如下所示:
extern int Image$$RW_IRAM1$$ZI$$Limit; #define HEAP_BEGIN ((void *)&Image$$RW_IRAM1$$ZI$$Limit) -
IAR环境下,栈结束地址的获取,如下所示:
#pragma section="CSTACK" #define HEAP_BEGIN (__segment_end("CSTACK")) -
GCC环境下,栈结束地址的获取,如下所示:
extern int __bss_end; #define HEAP_BEGIN ((void *)&__bss_end)
四、RT-Thread程序更改
只需要在 board.h 文件中定义相关宏即可,然后修改 board.c 文件中rt_system_heap_init函数 的内存获取地址。
board.h 文件
/*
* Change Logs:
* Date Author
* 2022-06-29 jiaozhu
*/
#ifndef __BOARD_H__
#define __BOARD_H__
#include "stm32f10x.h"
#include "drv_gpio.h"
#include "drv_usart.h"
#ifdef __cplusplus
extern "C"
{
#endif
/*-------------------------- ROM/RAM CONFIG BEGIN --------------------------*/
#define ROM_START ((uint32_t)0x08000000)
#define ROM_SIZE (64 * 1024)
#define ROM_END ((uint32_t)(ROM_START + ROM_SIZE))
#define RAM_START (0x20000000)
#define RAM_SIZE (20 * 1024)
#define RAM_END (RAM_START + RAM_SIZE)
#define STM32_SRAM1_END RAM_END
/*-------------------------- GET HEAP SIZE --------------------------*/
#if defined(__CC_ARM) || defined(__CLANG_ARM)
extern int Image$$RW_IRAM1$$ZI$$Limit;
#define HEAP_BEGIN ((void *)&Image$$RW_IRAM1$$ZI$$Limit)
#elif __ICCARM__
#pragma section="CSTACK"
#define HEAP_BEGIN (__segment_end("CSTACK"))
#else
extern int __bss_end;
#define HEAP_BEGIN ((void *)&__bss_end)
#endif
#define HEAP_END STM32_SRAM1_END
#ifdef __cplusplus
}
#endif
#endif /* __BOARD_H__ */
board.C 文件
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2017-07-24 Tanek the first version
* 2018-11-12 Ernest Chen modify copyright
*/
#include <rtthread.h>
#include <board.h>
#define _SCB_BASE (0xE000E010UL)
#define _SYSTICK_CTRL (*(rt_uint32_t *)(_SCB_BASE + 0x0))
#define _SYSTICK_LOAD (*(rt_uint32_t *)(_SCB_BASE + 0x4))
#define _SYSTICK_VAL (*(rt_uint32_t *)(_SCB_BASE + 0x8))
#define _SYSTICK_CALIB (*(rt_uint32_t *)(_SCB_BASE + 0xC))
#define _SYSTICK_PRI (*(rt_uint8_t *)(0xE000ED23UL))
// Updates the variable SystemCoreClock and must be called
// whenever the core clock is changed during program execution.
extern void SystemCoreClockUpdate(void);
// Holds the system core clock, which is the system clock
// frequency supplied to the SysTick timer and the processor
// core clock.
extern uint32_t SystemCoreClock;
void STM32F10x_peripheral_init(void)
{
// Initialize serial port
USART1_Config();
// Initialize LED
LED_GPIO_Config();
}
static uint32_t _SysTick_Config(rt_uint32_t ticks)
{
if ((ticks - 1) > 0xFFFFFF)
{
return 1;
}
_SYSTICK_LOAD = ticks - 1;
_SYSTICK_PRI = 0xFF;
_SYSTICK_VAL = 0;
_SYSTICK_CTRL = 0x07;
return 0;
}
/**
* This function will initial your board.
*/
void rt_hw_board_init()
{
STM32F10x_peripheral_init();
/* System Clock Update */
SystemCoreClockUpdate();
/* System Tick Configuration */
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init((void *) HEAP_BEGIN, (void *) HEAP_END);
#endif
/* Set the shell console output device */
#if defined(RT_USING_DEVICE) && defined(RT_USING_CONSOLE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
/* Board underlying hardware initialization */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
}
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
五、堆区和栈区的空间使用查看
-
栈空间的使用情况查看
因为栈空间的管理直接是由编译管理的,所以编译完成后直接可以看到编译器查看(这里以MDK环境为例),如下图所示:

从图中可知,栈空间的使用等于208+3448(字节)。
-
堆空间的使用情况查看
在RT-Thread 有相应内存管理算法,也提供了堆内存是查看方式,所以只需要在 FinSH 中使用 free 指令查看即可,如下图所示,对于 FinSH 不了解的小伙伴,可以查看STM32 移植 RT-Thread 标准版的 FinSH 组件

参考文献
STM32链接脚本详解:https://blog.csdn.net/qq_27575841/article/details/104373417
本文来自博客园,作者:浇筑菜鸟,转载请注明原文链接:https://www.cnblogs.com/jzcn/p/16427067.html
如本博客的内容侵犯了你的权益,请与以下地址联系,本人获知后,马上删除。同时本人深表歉意,并致以崇高的谢意! cn_jiaozhu@qq.com

 浙公网安备 33010602011771号
浙公网安备 33010602011771号