周六900C++2022-10-15 深搜
深度优先搜索
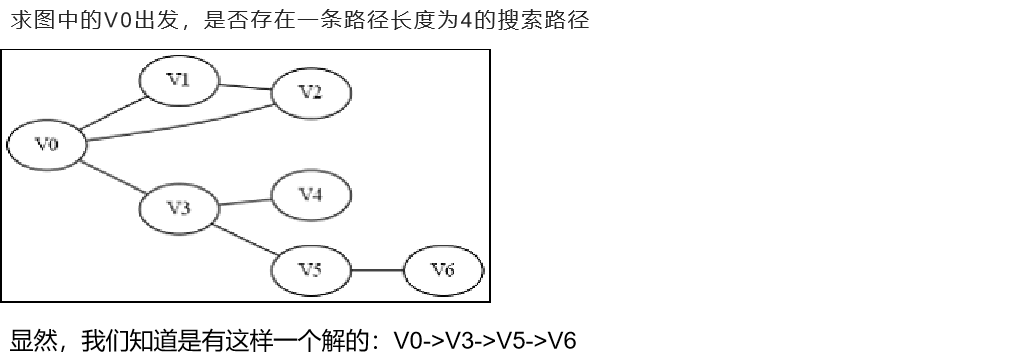
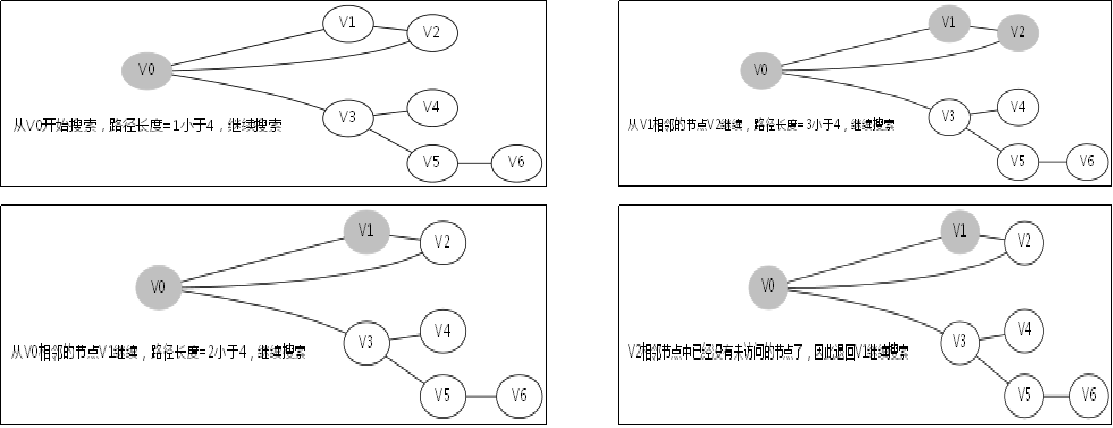
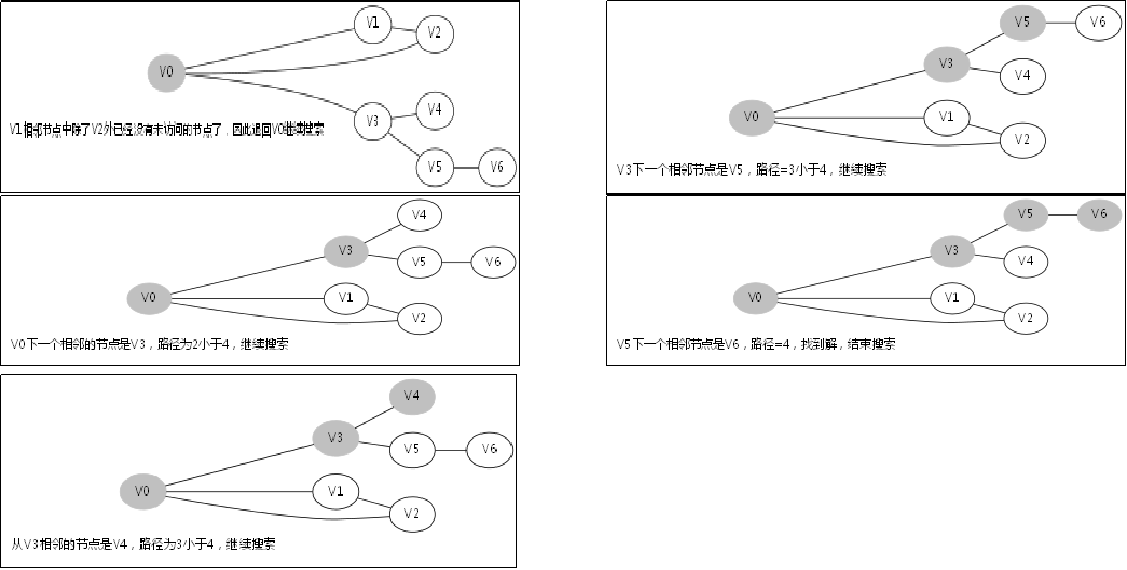
深度优先搜索(缩写DFS)有点类似广度优先搜索,也是对一个连通图进行遍历的算法。它的思想是从一个顶点V0开始,沿着一条路一直走到底,如果发现不能到达目标解,那就返回到上一个节点,然后从另一条路开始走到底,这种尽量往深处走的概念即是深度优先的概念。 属于盲目搜索,最糟糕的情况算法时间复杂度为O(!n)。
深搜的模板:
void dfs(int x,int y) { if(搜索要满足的条件){相应的操作;return; } for(循环搜索的方向,即探寻下一步) { 根据当前的x,y得到下一步的坐标tx,ty if(对tx,ty做越界判断)continue; if(当前坐标vis[tx][ty]==0 && 下一步在地图上是可走的) { vis[tx][ty] = 1; 更新相应数据,如求和、步长等等 dfs(tx,ty); 以tx,ty作为新的起点传入dfs中去寻找符合条件的下一步 vis[tx][ty] = 0; 将更新的数据回溯到未更新前,如步长-1,求和--等 } } }
TZOJ 3286: Lake Counting
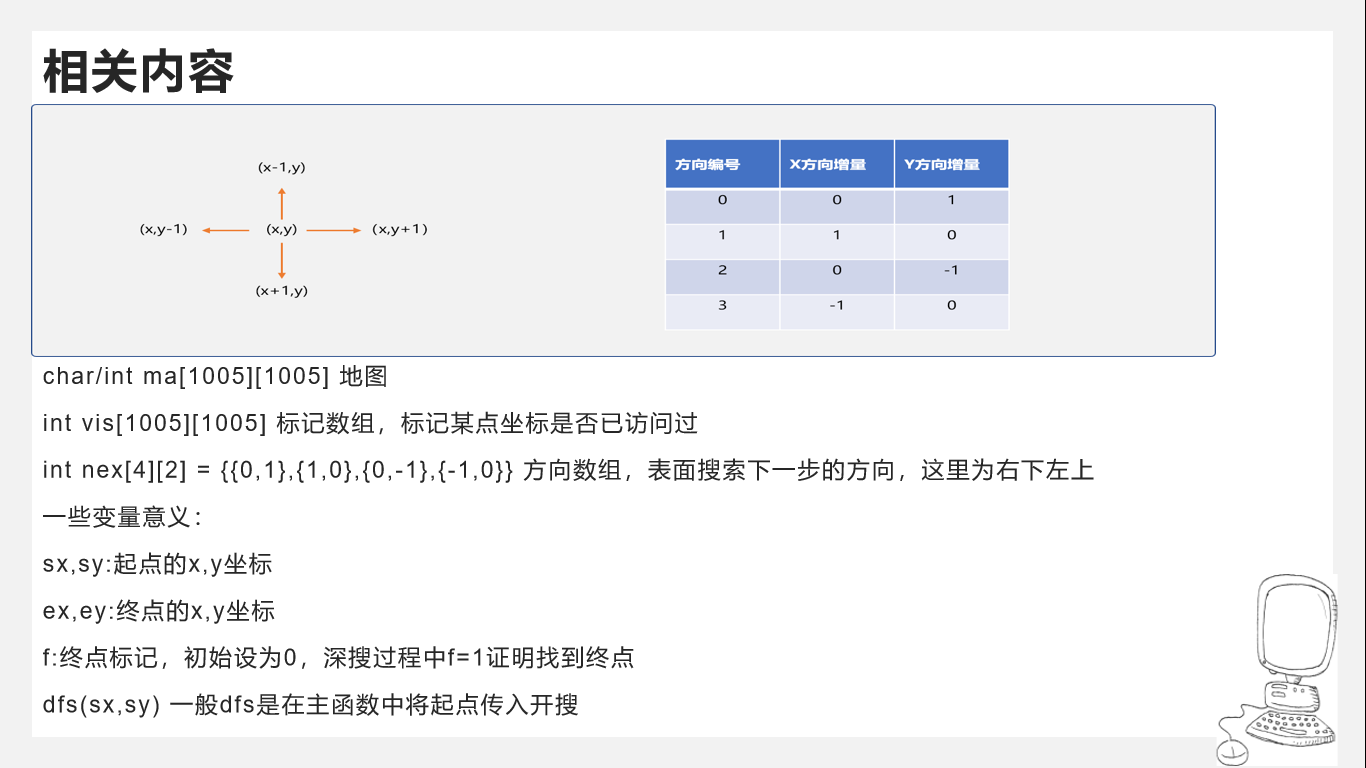
#include<bits/stdc++.h> using namespace std; char ma[1005][1005]; //地图 int vis[1005][1005]; //标记数组,标记某点坐标是否已访问过 int nex[8][2] = {{0,1},{1,0},{0,-1},{-1,0},{-1,1},{1,1},{1,-1},{-1,-1}}; //方向数组,表面搜索下一步的方向,这里为右下左上 int n,m; void dfs(int x,int y) { for(int i=0;i<8;i++) { int tx = x+nex[i][0]; //下一步坐标tx = 当前坐标x+第i个方向的第0个数nex[i][0] int ty = y+nex[i][1]; if(tx<1||tx>n||ty<1||ty>m)continue; //越界判断 if(ma[tx][ty]=='W' && vis[tx][ty]==0)//如果第(tx,ty)个点是湖泊W,且在vis上没访问过 { vis[tx][ty] = 1; //访问 dfs(tx,ty); //继续搜索 } } } int main() { cin>>n>>m; for(int i=1;i<=n;i++) for(int j=1;j<=m;j++) cin>>ma[i][j]; //以上是输入 int ans = 0; //湖泊数 for(int i=1;i<=n;i++) for(int j=1;j<=m;j++) { if(ma[i][j]=='W' && vis[i][j]==0) //如果第(i,j)个点是湖泊W,且在vis上没访问过 { vis[i][j] = 1; //访问 ans++; //湖泊数+1 dfs(i,j);//将i,j相邻的所有湖泊搜索标记 } } cout<<ans; return 0; }
TZOJ 4833: 选数
#include<bits/stdc++.h> using namespace std; int ma[105]; //地图 int vis[105]; //标记数组,标记某点坐标是否已访问过 int n,k,sum,ans,len; void dfs(int x); int prime(int n); int main() { cin>>n>>k; for(int i=1;i<=n;i++) cin>>ma[i]; //以上是输入 dfs(1); //从0开始 cout<<ans; return 0; } void dfs(int x) { if(len==k){ if(prime(sum))ans++; return; } for(int i=x;i<=n;i++) { if(vis[i]==0) { sum+=ma[i]; len++; vis[i] = 1; dfs(i+1); len--; vis[i] = 0; sum-=ma[i]; } } } int prime(int n) { if(n==1)return 0; for(int i=2;i*i<=n;i++) if(n%i==0)return 0; return 1; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号