图论学习笔记
我的博客搬到这里了,以后博客园就不怎么用了
图论学习笔记
最近本蒟蒻在复习图论,发现自己已经基本把图论给忘了,所以就打算写这样一篇学习笔记,用来复习。
一、图的表示#
1.邻接矩阵#
用一个二维数组存边,表示点到点权值为。添边、查边复杂度都是,访问与所有一个点连接的点的复杂度为,占用空间较大,适合稠密图。
模板:
int G[5000][5000], u, v, k, n, m;
scanf("%d%d", &n, &m);
for (int i = 0; i < m; ++i) {
scanf("%d%d%d", &u, &v, &k);
G[u][v] = k;
}
2.邻接表#
用个数组存储每个节点发出的边,占用空间较小,适合稀疏图。
模板(vector方法):
#include<bits/stdc++.h>
using namespace std;
struct Node {
int v, k;
};
vector<Node> head[5000];
int main() {
int n, m, u, v, k;
scanf("%d%d", &n, &m);
for (int i = 0; i < m; ++i) {
scanf("%d%d%d", &u, &v, &k);
head[u].push_back((Node) {v, k});
}
return 0;
}
二、拓扑排序#
三、最小生成树#
1.定义#
一个无向连通图的最小生成树是该图的一个子图,且是一棵树,包含图中的所有顶点,且边权和最小。
2.Prim算法#
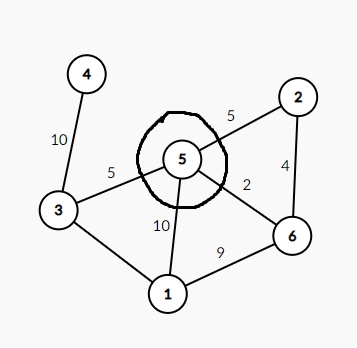
设一个点集中仅包含初始节点(可以是任意节点),寻找一条边,满足点在集合中,点不在集合中,且边权是所有这样的边中最小的,则这条边是最小生成树中的一条边,将点也加入集合中,重复这样的操作,直到集合中包含所有的节点。那么找到的所有的边的集合就是这个图的最小生成树。Prim算法主要利用了贪心的思路。
形象地说,就是在图上选一个点,然后在这个点的周围画一个圈。(如图)
然后在和圈相交的边里面选一条权值最小的(在图中即5与6之间的边),再把这个权值最小的边指向的节点也围到圈里。(如图)
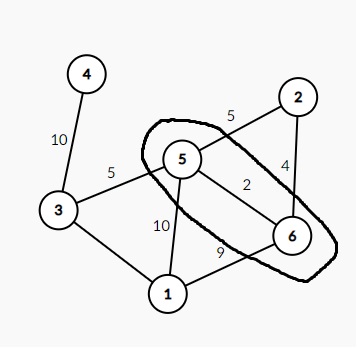
然后再找与圈相交的边权最小的边,并把指向的节点圈到圈里面,以此类推,直到圈里包含了所有的节点,那么所有选过的边就是这棵树的最小生成树。
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Node {
int v, k;
};
vector <Node> head[200002];
int q[200002], n, m, tot = 0; //q[i]表示点i是否在点集q中
priority_queue<pair<int, int> > p; //堆优化,记录节点i与点集q中一点相连的最短的边的权值
void Prim(int root) {
p.push(make_pair(0, root));
memset(q, 0, sizeof(q));
int u, v, k;
while (!p.empty()) {
k = p.top().first, u = p.top().second;
p.pop();
if (q[u]) {
continue;
}//节点u已经在集合q中,直接跳过
tot += k;
q[u] = 1;
for (int j = 0; j < (signed)head[u].size(); ++j) {
v = head[u][j].v, k = head[u][j].k;
if (!q[v]) {
p.push(make_pair(k, v));
}
}//更新p数组
}
}
int main() {
scanf("%d%d", &n, &m);
int x, y, z;
for (int i = 1; i <= m; ++i) {
scanf("%d%d%d", &x, &y, &z);
head[x].push_back((Node) {y, -z});
head[y].push_back((Node) {x, -z});
//由于优先队列是大根堆,就把边权取反,即可变成小根堆
}
Prim(1);
printf("%d\n", -tot);
return 0;
}
3.Kruskal算法#
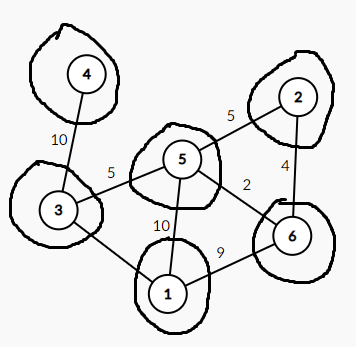
首先将所有的节点放入不同的点集中,每个点集中只有一个节点。然后进行遍历,寻找一条边,满足节点与节点不在同一个集合中,且是满足这个条件的边中权值最小的。那么这条边就是最小生成树中的一条边。将节点与节点所在的集合合并,再进行查找边与合并集合的操作,直到所有的点都在同一个集合中,那么找到的所有的边的集合就是这个图的最小生成树。
Kruskal算法可以利用并查集实现。
形象地说,就是在图中所有的节点周围都画一个圈(如图):
再在不被包含在一个圈里的的边(即与两个圈有交点的边)找到权值最小的边(在图中即5到6的边),把这两个圈合并。(如图)
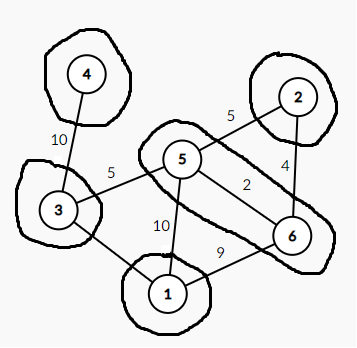
然后重复这样的操作,直到所有的节点都在一个圈里,那么所有选过的边就是这棵树的最小生成树。
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
int n, m, pre[200001], tot = 0, k = 0;
struct Node {
int u, v, k;
};
vector<Node> edge;//edge数组存边
//----------------------------------------并查集
inline int find(int x) {
int y = x, j;
while (x != pre[x])
x = pre[x];
while (y != x) {
j = pre[y];
pre[y] = x;
y = j;
}
return x;
}
inline void join(int x, int y) {
int pre_x = find(x), pre_y = find(y);
if (pre_x != pre_y) {
pre[pre_x] = pre_y;
}
}
//----------------------------------------并查集
bool cmp(Node x, Node y) {
return x.k < y.k;
}
void Kruskal() {
sort(edge.begin(), edge.end(), cmp); //将边按权值从小到大排序
int cnt = 0;
for (int i = 0; i < m; i++) {
if (cnt == n - 1) {
return;
}//边够了
int u = edge[i].u, v = edge[i].v, k = edge[i].k;
if (find(u) != find(v)) { //如果这条边可以选
join(u, v);
cnt++;
tot += k;
}
}
}
int main() {
scanf("%d%d", &n, &m);
int x, y, z;
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &x, &y, &z);
edge.push_back((Node) {x, y, z});
}
for (int i = 1; i <= n; i++) {
pre[i] = i;
}//并查集初始化
Kruskal();
printf("%d\n", tot);
return 0;
}
4.Prim算法与Kruskal算法的区别#
| 算法 | Prim | Kruskal |
|---|---|---|
| 时间复杂度 | ||
| 适用范围 | 稠密图 | 稀疏图 |
| 注:为点数,为边数。 | ||
| Prim算法需要通过堆优化后复杂度才能达到。 |
四、最短路#
1.定义#
最短路问题(short-path problem)是网络理论解决的典型问题之一,可用来解决管路铺设、线路安装、厂区布局和设备更新等实际问题。基本内容是:若网络中的每条边都有一个数值(长度、成本、时间等),则找出两节点(通常是源节点和阱节点)之间总权和最小的路径就是最短路问题。——百度百科
说人话就是在选一条连接两个点的路径,使这条路权值和最小。
2.Dijkstra算法#
Dijkstra算法是一个求单源最短路径的算法,只适用于没有负权边的图。Dijkstra算法与Prim算法有些类似,都是设一个点集,最初只有一个节点,然后不断地添点,直到全部添加。
设点集,最初只包含起点。设为目前找到的点到编号为的节点的最短路径,所有初始化为INF,初始化为。首先寻找不在点集中且值最小的点,将点加入中,并进行松弛操作,即对于所有从点出发的边,.然后再进行找点,加点与松弛的操作,直到所有点都被加入中为止。那么最短路就求出来了。
原理是由于图中没有负边,所以如果为图中最小的,那么它就不可能再被更新,所以就可以被确定,即被加入点集中。
如果需要记录路径,那么就建立一个数组,表示节点的上一个节点。每次进行松弛操作时,如果,那么就将赋值为即可。
与Prim算法相似,Dijkstra算法也可以在找值最大的节点时利用堆进行优化。
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Edge {
int v, k;
};
vector<Edge> head[100001];
int dis[100001], q[100001];
struct Node {
int dis, u; //u:节点编号 dis:dis值
bool operator<(const Node& a) const { //运算符重载,以使用STL优先队列
return dis > a.dis;
}
};
int n, m;
void Dijkstra(int s) {
priority_queue<Node> que;//堆优化
bool vis[100001] = {0}; //是否被访问过
memset(dis, 0, sizeof(dis));
dis[s] = 0;
que.push((Node) {0, s});
while (!que.empty()) {
int u = que.top().u;
que.pop();
if (vis[u]) { //如果已经被访问过了,那么这个节点的dis值就是在松弛操作之前的dis值了,直接删除即可。
//由于松弛后的dis值一定小于松弛前的dis值,所以不用担心出错。
continue;
}
vis[u] = 1;
q[u] = 1;
for (int i = 0; i < (signed)head[u].size(); i++) {
int v = head[u][i].v, k = head[u][i].k;
if (!q[v] && dis[v] > dis[u] + k) { //松弛操作
dis[v] = dis[u] + k;
que.push((Node) {dis[v], v});
}
}
}
}
int main() {
int u, v, k, s;
scanf("%d%d%d", &n, &m, &s);
for (int i = 0; i < m; i++) {
scanf("%d%d%d", &u, &v, &k);
head[u].push_back((Edge) {v, k});
}
Dijkstra(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
3.Bellman-Ford算法#
Bellman-Ford算法可以求有负权边的图的单源最短路径。算法是对数组进行(n 为节点个数)轮松弛操作。
原理是最短路一定经过个节点(起点不算),即有个值需要更新。每更新一个节点的值,其他的节点也可能会受到影响。故进行轮松弛操作后可以保证求出最短路。
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
struct Node {
int u, v, k;
};
vector <Node> edge;
int dis[100001];
int n, m;
void Bellman_Ford(int s) {
memset(dis, 0, sizeof(dis));
dis[s] = 0;
for (int i = 0; i < n - 1; i++) {
for (int j = 0; j < m; j++) {
int u = edge[j].u, v = edge[j].v, k = edge[j].k; //遍历每一条边,进行松弛
if (dis[v] > dis[u] + k) {
dis[v] = dis[u] + k;
}
}
}
}
int main() {
int u, v, k, s;
scanf("%d%d%d", &n, &m, &s);
for (int i = 0; i < m; i++) {
scanf("%d%d%d", &u, &v, &k);
edge.push_back((Node) {u, v, k}); //edge数组存边
}
Bellman_Ford(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
另外值得一提的是Bellman-Ford算法还可以判断图中是否存在负环(即权值和为负的环),只需要在进行n-1次操作后再进行一轮松弛操作,如果还有节点的值被更新,说明图中存在负环。
4.SPFA算法#
它不是死了吗
Shortest Path Fast Algorithm 算法是Bellman-Ford算法的队列优化版本。
我们可以发现,如果一个点的值更新了 ,那么与这个节点相邻的节点的值都可能会受到影响。所以我们可以建一个队列,存放等待更新的节点,并每次对队首的节点进行松弛操作并把所有与队首相连的节点入队,并把队首pop出去,重复进行这样的操作,直到队列为空。
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 10e9;
int n, m, dis[100001];
struct Node {
int v, k;
};
vector<Node>head[100001];
void SPFA(int s) {
bool vis[100001];//vis数组记录是否在队列中
queue<int> que;
que.push(s);
for (int i = 0; i <= n; i++) {
dis[i] = INF;
vis[i] = 0;
}
vis[s] = 1;
dis[s] = 0;
while (!que.empty()) {
int num = que.front();
que.pop();
vis[num] = 0;
for (int i = 0; i < head[num].size(); i++) { //对队首进行松弛操作
if (dis[head[num][i].v] > dis[num] + head[num][i].k) {
dis[head[num][i].v] = dis[num] + head[num][i].k;
if (!vis[head[num][i].v]) { //如果队首更新,就把与队首相邻的节点入队
que.push(head[num][i].v);
vis[head[num][i].v] = 1;
}
}
}
}
}
int main() {
int s, x, y, z;
Node a;
scanf("%d%d%d", &n, &m, &s);
for (int i = 1; i <= m; i++) {
scanf("%d%d%d", &x, &y, &z);
head[x].push_back((Node) {y, z});
}
SPFA(s);
for (int i = 1; i <= n; i++) {
printf("%d ", dis[i]);
}
return 0;
}
5.Floyd-Warshall算法#
Floyed-Warshall算法可以求出多源最短路径,即求出任意两点之间的最短路径。Floyd-Warshall算法的本质是动态规划。设表示节点和节点之间的一条仅经过编号最大不超过的节点最短路径的长度,那么显然,因为=0,所以路径中不能经过其他节点。
那么如何从推出呢?我们需要分两种情况:
- 是一条不经过节点的路径的长度,那么.
- 是一条经过节点的路径的长度,那么 (将这条路径分为两部分)
由此我们可以得到状态转移方程:
模板:
#include<bits/stdc++.h>
using namespace std;
const int INF = 1e9;
int n, dis[1001][1001];
void Floyd_Warshall() {
for (int k = 1; k <= n; k++) { //循环k的值
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
if (dis[i][k] != INF && dis[k][j] != INF && dis[i][k] + dis[k][j] < dis[i][j]) { //状态转移
dis[i][j] = dis[i][k] + dis[k][j];
}
}
}
}
}
int main() {
scanf("%d", &n);
int x, y, z;
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
scanf("%d", &dis[i][j]);
if (dis[i][j] == -1) {
dis[i][j] = INF;
}
}
}//邻接矩阵存图
Floyd_Warshall();
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
if (dis[i][j] == INF)
printf("-1 ");
else
printf("%d ", dis[i][j]);
}
printf("\n");
}
return 0;
}
update on 2019/11/12:改变了码风,修改了一些错误,Prim算法增加了堆优化。#
作者: _逃离地球
出处:https://www.cnblogs.com/juruoyqr/p/11286320.html
版权:本站使用「CC BY 4.0」创作共享协议,转载请在文章明显位置注明作者及出处。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 地球OL攻略 —— 某应届生求职总结
· 周边上新:园子的第一款马克杯温暖上架
· Open-Sora 2.0 重磅开源!
· 提示词工程——AI应用必不可少的技术
· .NET周刊【3月第1期 2025-03-02】