Matlab复现Floyd算法
Floyd算法适用于APSP(All Pairs Shortest Paths,多源最短路径),是一种动态规划算法,稠密图效果最佳,边权可正可负。此算法简单有效,由于三重循环结构紧凑,对于稠密图,效率要高于Dijkstra算法,也要高于SPFA算法。
优点:容易理解,可以算出任意两个节点之间的最短距离,代码编写简单。
缺点:时间复杂度比较高O(n^3),不适合计算大量数据。
算法思想:
Floyd算法是一种在具有正或负边缘权重(但没有负周期)的加权图中找到最短路径的算法。算法的单个执行将找到所有顶点对之间的最短路径的长度(加权)。
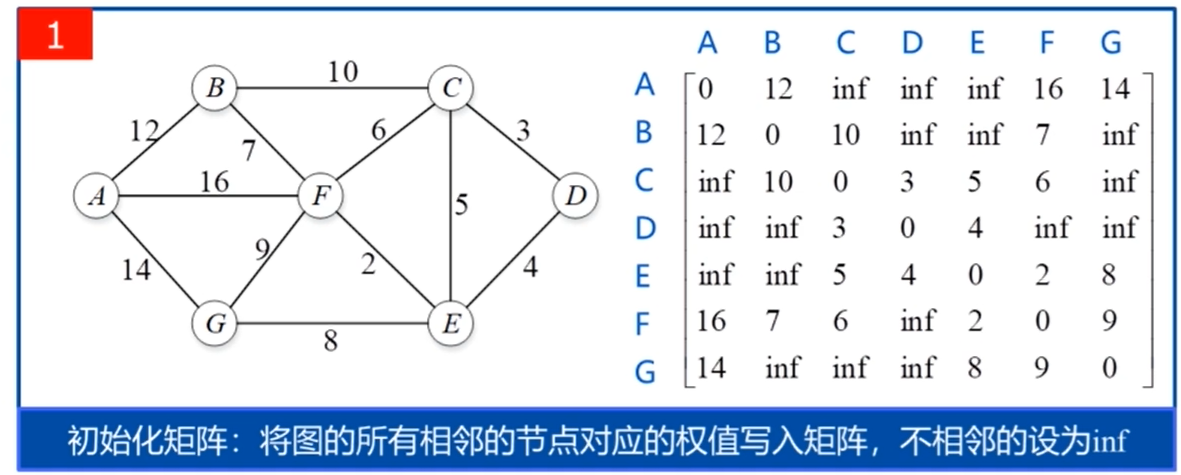
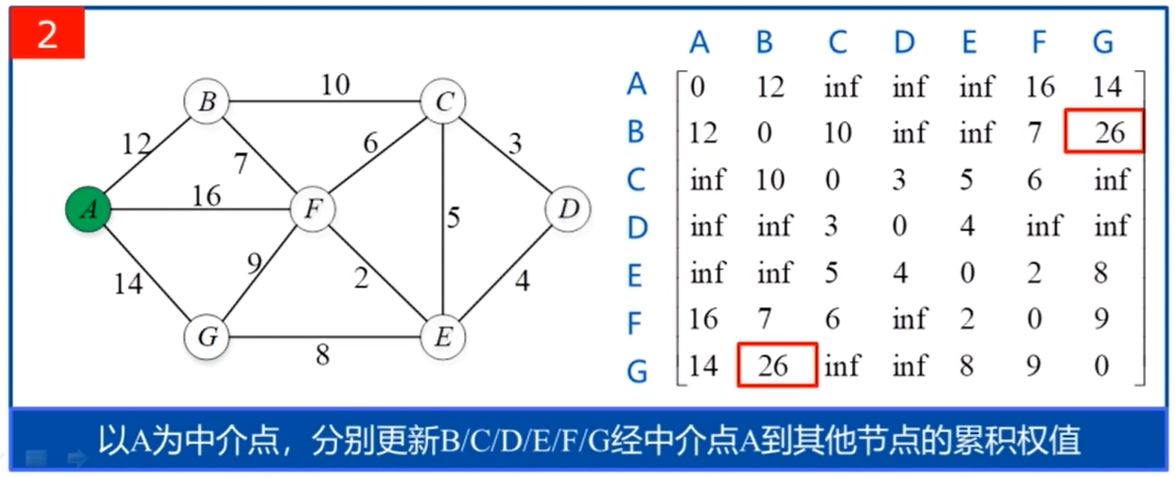
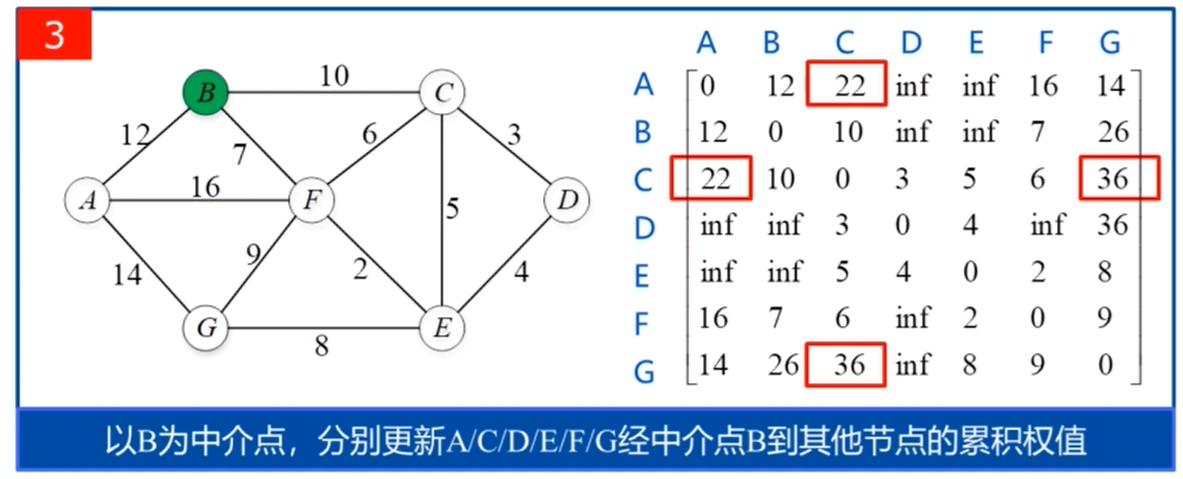
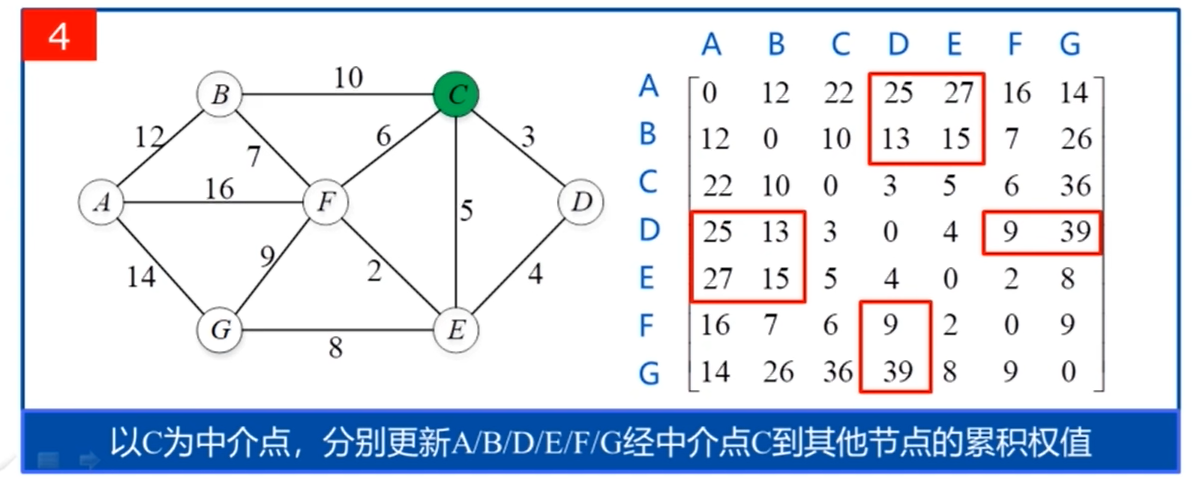
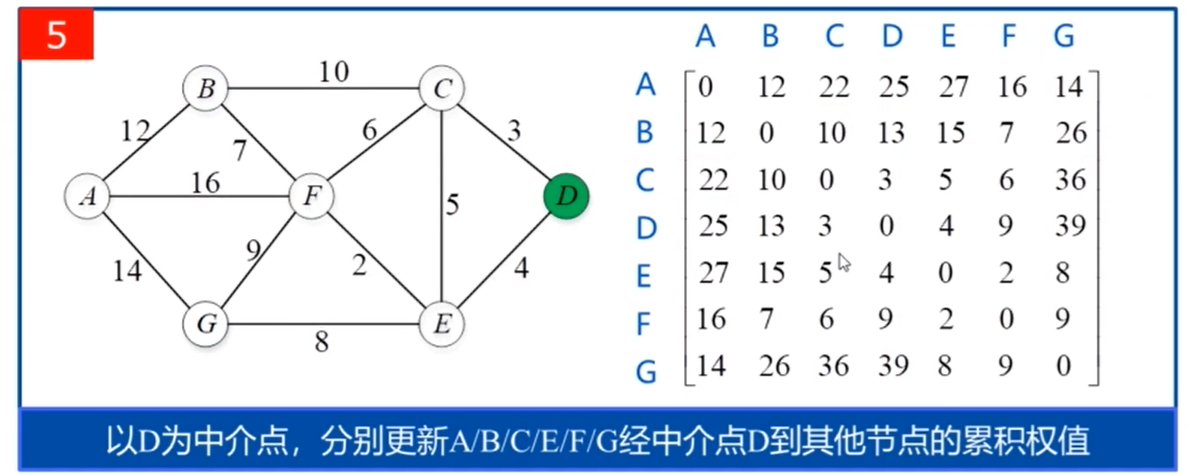
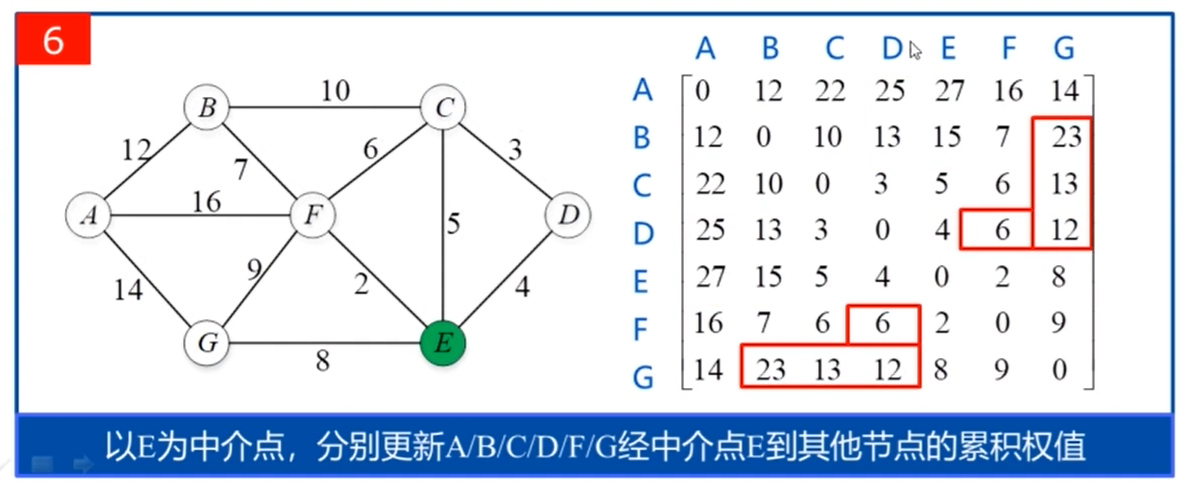
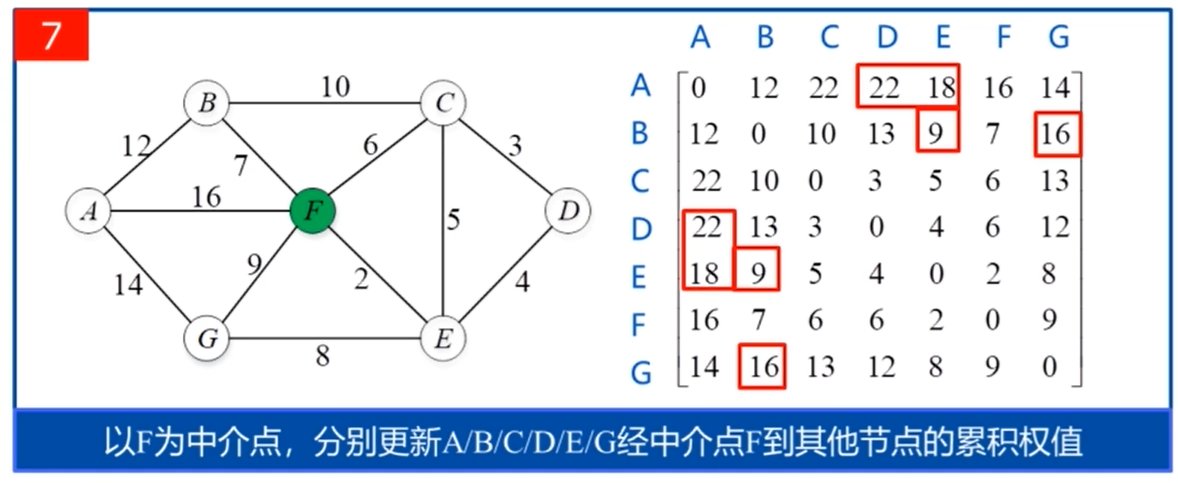
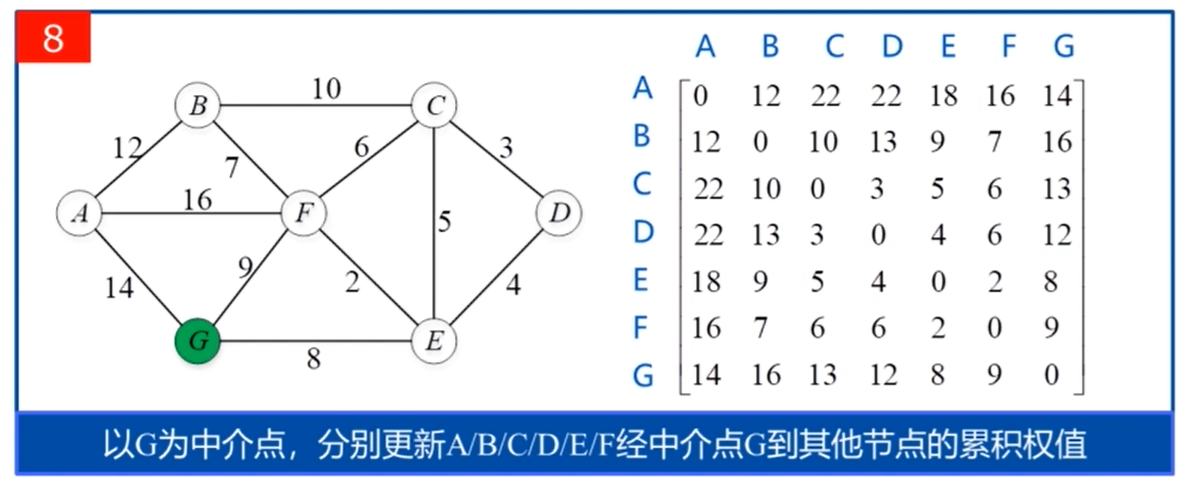
其状态转移方程如下: map[i,j] = min{map[i,k]+map[k,j],map[i,j]};
map[i,j] 表示i到j的最短距离,k是i到j的中介点,map[n,n] 初值应该为0,或者按照题目意思来做。
当然,如果这条路没有通的话就直接将 map[i,j] 设置为inf
源代码:
init.m:初始化栅格地图
function [field,cmap] = init(rows, cols)
cmap = [1 1 1; ... % 1-白色-空地
0 0 0; ... % 2-黑色-静态障碍
1 0 0; ... % 3-红色-动态障碍
1 1 0;... % 4-黄色-起始点
1 0 1;... % 5-品红-目标点
0 1 0; ... % 6-绿色-到目标点的规划路径
0 1 1]; % 7-青色-动态规划的路径
% 构建颜色MAP图
colormap(cmap);
% 定义栅格地图全域,并初始化空白区域
field = ones(rows, cols);
% 障碍物区域
obsRate = 0.3;
obsNum = floor(rows*cols*obsRate);
obsIndex = randi([1,rows*cols],obsNum,1);
field(obsIndex) = 2;
getNeighborNodes.m: 获得给定点的8个邻接点以及距离矩阵
function neighborNodes = getNeighborNodes(rows, cols, lineIndex, field)
[row, col] = ind2sub([rows,cols], lineIndex);
neighborNodes = inf(8,2);
%% 查找当前父节点临近的周围8个子节点
neighborIndex = 1;
for i = -1 : 1
for j = -1 : 1
nx = row + i;
ny = col + j;
if (i == 0 && j == 0) || nx <= 0 || nx > rows || ny <= 0 || ny > cols
continue
end
child_node_line = sub2ind([rows,cols], nx, ny);
neighborNodes(neighborIndex,1) = child_node_line;
if field(nx, ny) ~= 2
cost = norm([nx, ny] - [row, col]);
neighborNodes(neighborIndex,2) = cost;
end
neighborIndex = neighborIndex + 1;
end
end
Floyd.m:得到任何两点间的最短路径并存储,将起点到终点的最短路径绘制出来
% 基于栅格地图的机器人路径规划算法
% 第3节:Floyd算法
clc
clear
close all
%% 栅格界面、场景定义
% 行数和列数
rows = 10;
cols = 20;
[field,cmap] = init(rows, cols);
% 起点、终点、障碍物区域
startPos = 3;
goalPos = rows*cols-2;
field(startPos) = 4;
field(goalPos) = 5;
%% 算法初始化
n = rows*cols; % 栅格节点总个数
map = inf(n,n); % 所有节点间的距离map, 邻接矩阵
path = cell(n, n); % 存放对应的路径
% 初始化邻接矩阵和路径矩阵
for startNode = 1:n
if field(startNode) ~= 2 % 如果不是障碍物
neighborNodes = getNeighborNodes(rows, cols, startNode, field);
for i = 1:8
if ~(isinf(neighborNodes(i,1)) || isinf(neighborNodes(i,2)))
neighborNode = neighborNodes(i,1);
map(startNode, neighborNode) = neighborNodes(i,2);
path{startNode, neighborNode} = [startNode, neighborNode];
end
end
end
end
%% 进入三层主循环
for k = 1 : n % 中介点
for i = 1 : n
if i ~= k
for j = 1 : n
if j ~= i && j ~= k
if map(i,k) + map(k,j) < map(i,j)
map(i,j) = map(i,k) + map(k,j);
path{i,j} = [path{i,k}, path{k,j}(2:end)];
end
end
end
end
end
end
%% 画栅格界面
% 找出目标最优路径
path_target = path{startPos,goalPos};
field(path_target(2:end-1)) = 6;
% 画栅格图
image(1.5,1.5,field);
grid on;
set(gca,'gridline','-','gridcolor','k','linewidth',2,'GridAlpha',0.5);
set(gca,'xtick',1:cols+1,'ytick',1:rows+1);
axis image;
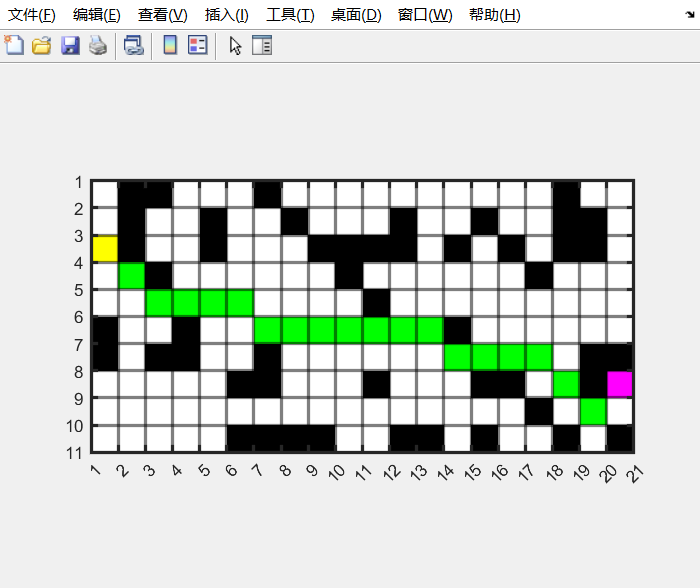
运行结果:
起点到终点的最短路径:
>> path{3,198}
ans =
3 14 25 35 45 55 66 76 86 96 106 116 126 137 147 157 167 178 189 198
>>
你只管出发,旅途自有风景~~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号