高等数学_Part2
 高等数学基础内容简要回顾👉第二部分
高等数学基础内容简要回顾👉第二部分
6 向量代数与空间解析几何
6.1 向量点乘与叉乘
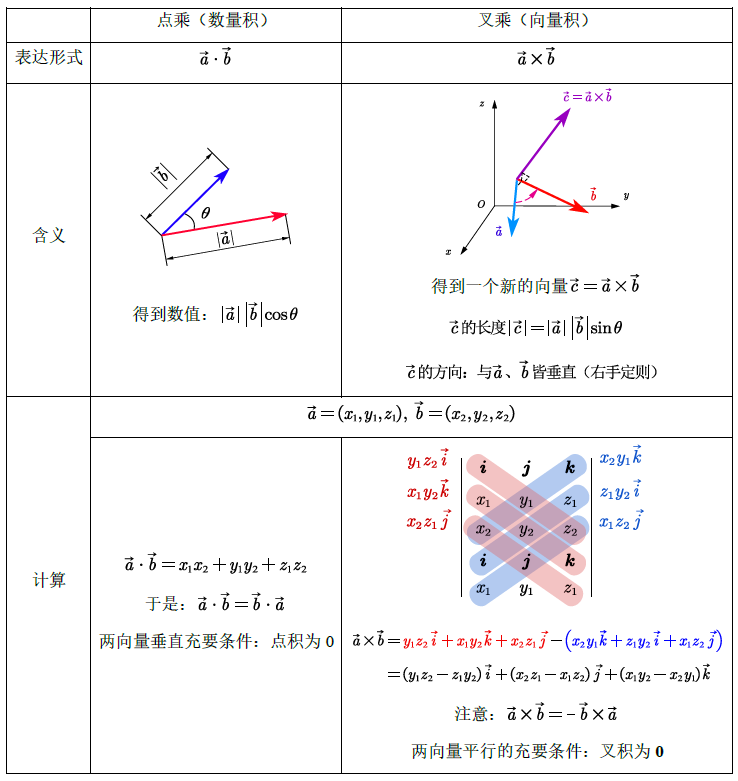
- 矢量的点乘与叉乘能够帮助我们处理空间中的问题:
- 获得向量间的角度信息
- 利用点乘,获得投影
- 利用叉乘,得到垂直的向量,以及两个向量张成的面积
6.2 空间平面与直线
6.2.1 空间平面相关公式
(1) 空间平面的点法式方程:\(A(x-x_0) + B(y-y_0) + C(z-z_0) = 0\)
(2) 空间平面的一般方程:\(Ax + By + Cz +D = 0\)
(3) 空间平面的截距式方程:\(\dfrac{x}{a} + \dfrac{y}{b} + \dfrac{z}{c} = 1\)
(4) 平面间的夹角\(\theta\):\(\cos \theta = \dfrac{|A_1A_2 + B_1B_2 + C_1C_2|}{\sqrt{A_1^2 + B_1^2 + C_1^2}\sqrt{A_2^2 + B_2^2 + C_2^2}}\)
(5) 点到平面的距离:\(d = \dfrac{Ax_0 + By_0 + Cz_0 +D}{\sqrt{A^2 + B^2 + C^2}}\)
6.2.2 空间直线公式
(1) 空间直线的一般方程:\(\left\{\begin{array}{l}A_{1} x+B_{1} y+C_{1} z+D_{1}=0 \\ A_{2} x+B_{2} y+C_{2} z+D_{2}=0\end{array}\right.\)
(2) 空间直线的对称式方程:\(\dfrac{x-x_0}{m} = \dfrac{y-y_0}{n} = \dfrac{z-z_0}{p}\)
(3) 空间直线的参数式方程:\(\left\{\begin{array}{l}x = x_0 + mt \\ y = y_0 + nt
\\ z = z_0 + pt \end{array}\right.\)
(4) 直线与直线间的夹角\(\theta\):\(\cos \theta=\dfrac{\left|\vec{v}_{1} \cdot \vec{v}_{2}\right|}{\left|\vec{v}_{1}\right|\left|\vec{v}_{2}\right|}\)(\(\vec{v}_{1}\)、\(\vec{v}_{2}\)是直线的方向向量)
(5) 直线与平面间的夹角\(\theta\):\(\sin \theta=\dfrac{\left|\vec{n} \cdot \vec{v}\right|}{\left|\vec{n}\right|\left|\vec{v}\right|}\)(\(\vec{n}\)是平面法向量、\(\vec{v}\)是直线的方向向量)
6.3 空间曲面与曲线
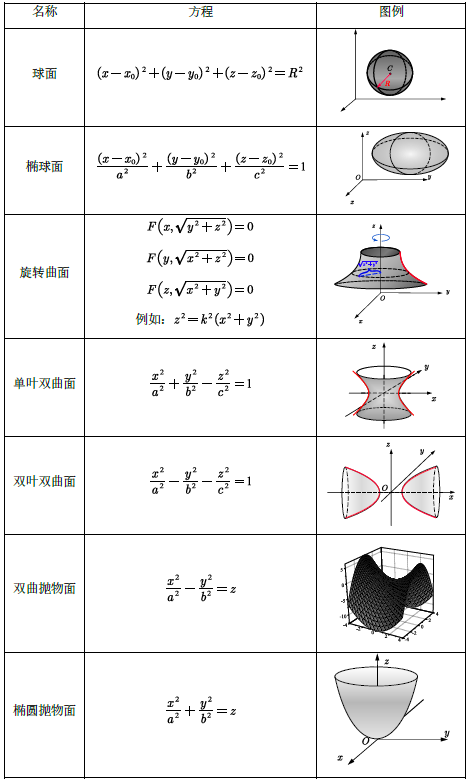
空间曲面:
(1) 球面:\((x-x_0)^2 + (y-y_0)^2 + (z-z_0)^2 = R^2\)
(2) 旋转曲面:\(F(x, \sqrt{y^2 + z^2}) = 0\)、\(F(y, \sqrt{x^2 + z^2}) = 0\)、\(F(z, \sqrt{x^2 + y^2}) = 0\)
(3) 柱面:\(F(x,y) = 0\)、\(F(x,z) = 0\)、\(F(y,z)=0\)
(4) 二次曲面:椭球面、椭球抛物面、双曲抛物面
7 多元函数微分法
7.1 多元函数的极限
在下册求解多元函数极限时,我们更加常见的是面对“\(\dfrac{0}{0}\)”型极限,适用的方法是化简或者等价无穷小代换(洛必达不再适用)。
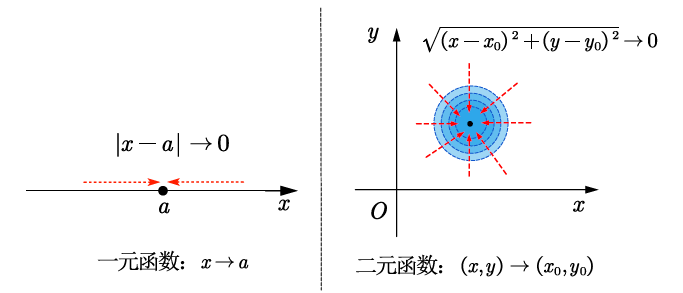
- 多元函数极限与一元函数极限之间的异同:
在一元函数极限\(\lim\limits_{x \to a} f(x)\)中,\(x \to a\)的过程,在一维数轴上只有两种方向(即\(x \to a^+\)与\(x \to a^-\));而在平面空间上,\(P\)向\(p_0\)接近时,两点距离\(\sqrt{(x-x_0)^2+(y-y_0)^2}\)越来越小,这个过程的路径、方向有无数种:
7.2 偏导数、全微分、方向导数、梯度
(1) 偏导数:多元函数\(f(x,y)\)随着其中某个自变量变化而对应的变化率,记作\(\dfrac{\partial f}{\partial x}\)、\(\dfrac{\partial f}{\partial y}\)。
(2) 全微分:多元函数\(z = f(x,y)\)的微变量\(\text{d}z\)与自变量微变量\(\text{d}x\)、\(\text{d}y\)之间的关系:\(\text{d}z = \dfrac{\partial f}{\partial x} \text{d}x + \dfrac{\partial f}{\partial y} \text{d}y\)
(3) 方向导数:多元函数沿着某个特定方向的变化率:\(\dfrac{\partial z}{\partial l}\)
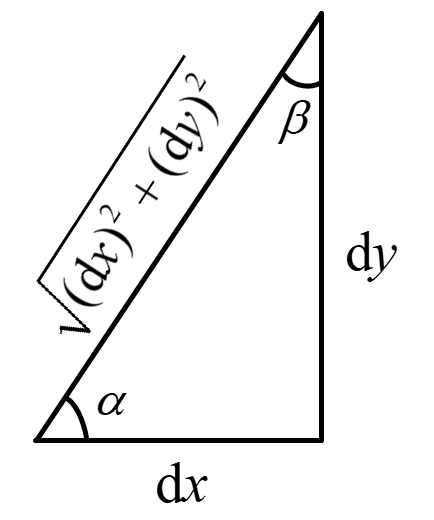
方向导数可以用语言描述为\(\dfrac{函数变化 \partial z}{变换步长 \partial l}\),其中,\(\partial z = \dfrac{\partial z}{\partial x} \text{d}x + \dfrac{\partial z}{\partial y} \text{d}y\),\(\partial l = \sqrt{(\text{d} x)^2 + (\text{d} y)^2}\),所以有:\(\dfrac{\partial z}{\partial l} = \dfrac{\dfrac{\partial z}{\partial x} \text{d}x + \dfrac{\partial z}{\partial y} \text{d}y}{\sqrt{(\text{d} x)^2 + (\text{d} y)^2}} = \dfrac{\partial z}{\partial x} \cos \alpha + \dfrac{\partial z}{\partial y} \cos \beta\),式子中\(\cos \alpha\)和\(\cos \beta\)的来源如下图所示:
(4) 梯度:多元函数\(f(x,y)\)变化率取值最大的方向:\(\vec{n} = (\dfrac{\partial f}{\partial x}, \dfrac{\partial f}{\partial y})\)
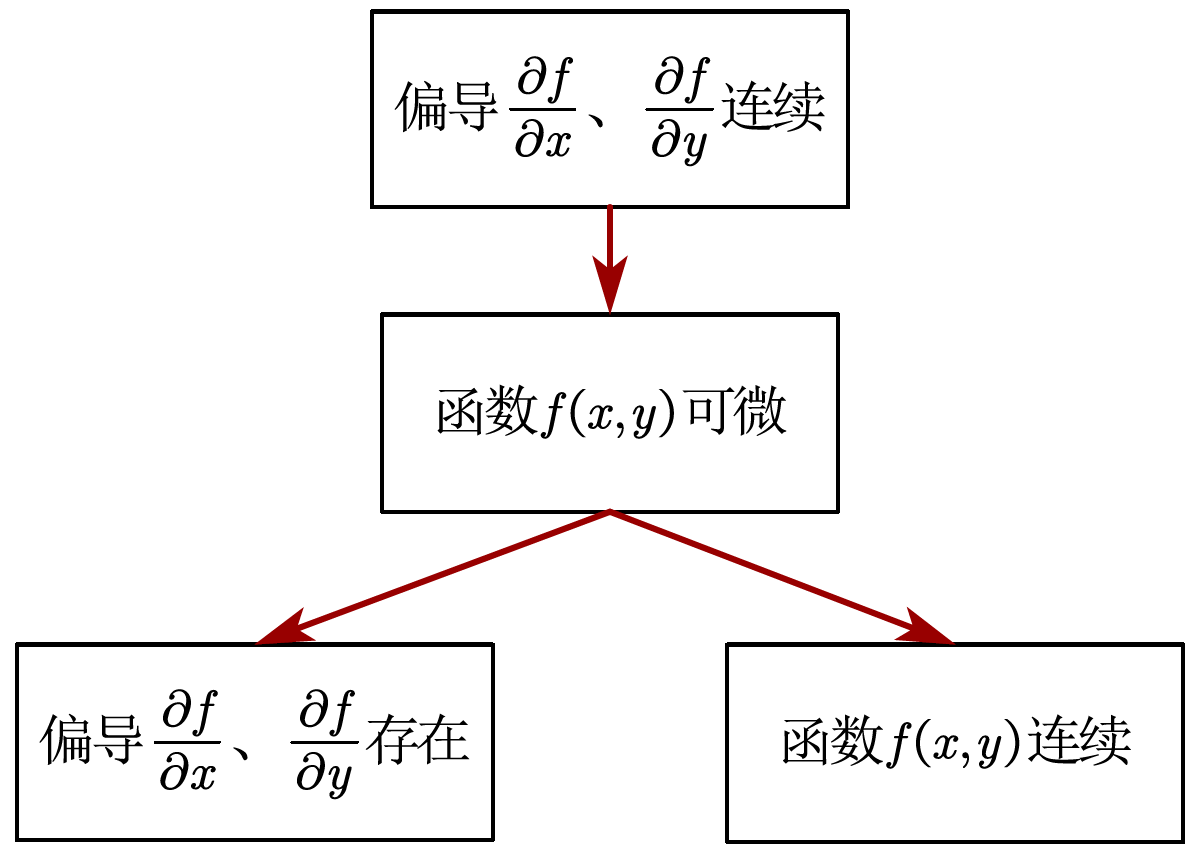
- 多元函数的连续性、偏导存在、可微、偏导连续之间的逻辑关系:
7.3 几何应用
曲面的切平面、法线,曲线的法平面和切线,推导背后的原理:
(1) 曲面切平面:\(F_x(x_0, y_0, z_0)(x-x_0) + F_y(x_0, y_0, z_0)(y-y_0) + F_z(x_0, y_0, z_0)(z-z_0) = 0\)
(2) 曲面的法线:\(\dfrac{x-x_0}{F_x(x_0, y_0, z_0)} = \dfrac{y-y_0}{F_y(x_0, y_0, z_0)} = \dfrac{z-z_0}{F_z(x_0, y_0, z_0)}\)
(3) 曲线切线:\(\dfrac{x-x_0}{x'(t_0)} = \dfrac{y-y_0}{y'(t_0)} = \dfrac{z-z_0}{z'(t_0)}\)
(4) 曲线法平面:\(x'(t_0)(x-x_0) + y'(t_0)(y-y_0) + z'(t_0)(z-z_0) = 0\)
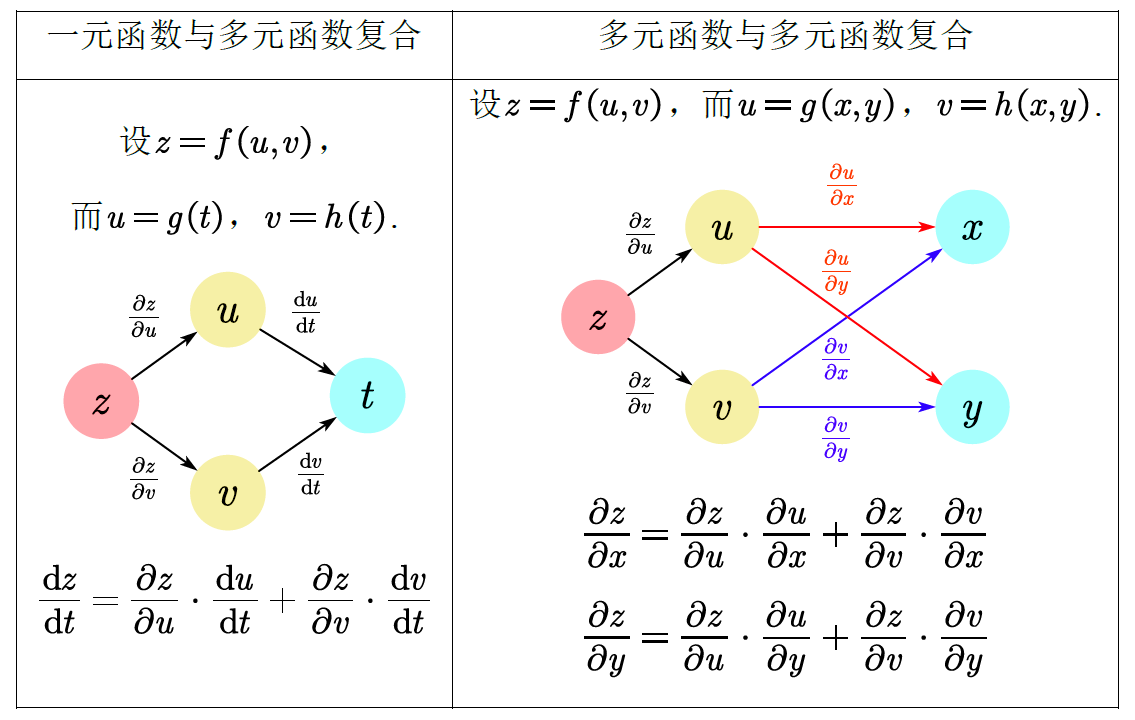
7.5 多元复合函数求导
在多元函数中的链式法则:画出复合关系链路图,同一链路乘起来,不同链路加起来
7.6 多元函数的零点、极值点、驻点、鞍点、拐点
-
零点:函数的零点是使得函数值为0的自变量的值。
- 例如:\(f(x)=x-1,x=1\)就是函数\(f(x)\)的零点。
-
极值点:函数的极值点是函数的单调性发生变化的点或是函数的局部极大值或极小值点。当函数存在导数时,函数的极值点是其导函数的变号零点。
- 例如:\(f(x)=x^2-1,x=0\)就是函数的\(f(x)\)的极小值点。或者说函数在\(x=0\)附近的函数值都比\(x=0\)时的函数值大。且\(x=1\)和\(x=-1\)是函数\(x\)的零点。再如:\(g(x)=|x|, x=0\)是函数的极小值点,但不是函数的驻点。
-
驻点:函数的驻点是函数一阶导数为零的点,即函数的驻点是函数的导函数的零点。但函数的驻点不一定是函数的极值点。当函数存在导数时,极值点一定是驻点,反之不一定正确。
- 例如:\(f(x)=x^3, x=0\)是函数的驻点(也是零点),但不是极值点。我们常常从函数的驻点中找极值点。
极值点与驻点的关系:极值点与驻点没有关系。。。
【(1) 驻点不一定是极值点】如\(f(x)=x^3\),一阶求导\(x=0\)取得驻点,但是这个函数是单增的,0处没有取得极值点。
【(2) 极值点也不一定是驻点】如\(f(x)=|x|\),取得极值点的时候是\(x=0\),但该点不可导,所以也还不是驻点。
『极值点一定是驻点条件要求\(f(x)\)在那点可导』
-
拐点:函数的拐点是函数的凹凸性发生变化的点,或者是函数二阶导数为零,且三阶导数不为零的点。
- 例如:\(f(x)=x^3, x=0\)是函数的拐点(也是驻点和零点,但不是极值点)。再如:\(g(x)=x^4, x=0\)是函数的驻点、极小值点和零点,但不是函数的拐点。
-
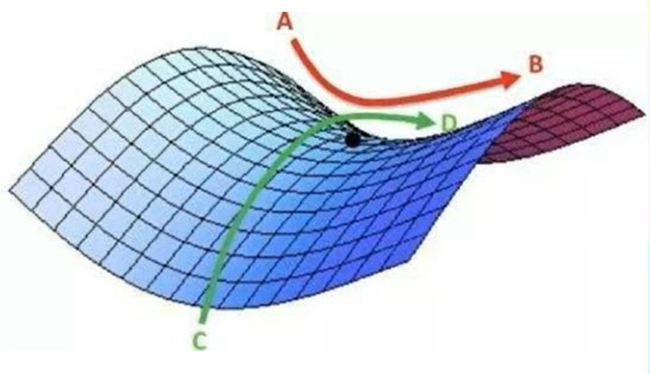
鞍点:目标函数在此点上的梯度(一阶导数)值为0,但从该点出发的一个方向是函数的极大值点,而在另一个方向是函数的极小值点。判断鞍点的一个充分条件是:函数在一阶导数为零处(驻点)的黑塞矩阵为不定矩阵(特征值有正有负)。
- 其他描述:一个不是局部最小值的驻点(一阶导数为0的点_称为鞍点。数学含义是:目标函数在此点上的梯度(一阶导数)值为0,但从改点出发的一个方向是函数的极大值点,而在另一个方向是函数的极小值点。
- 那么对于一个驻点如何判断它是否为鞍点呢?这里给出它的充分条件:判断鞍点的一个充分条件是:函数在一阶导数为零处(驻点)的黑塞矩阵为不定矩阵。
- 例如:对于二维平面,如\(y = x^3\)在\(x=0\)处,该点又称为驻点。对于三维平面,如\(y=x^2-y^2\)在\((0,0,0)\)处就是一个鞍点。
8 重积分
8.1 二重积分
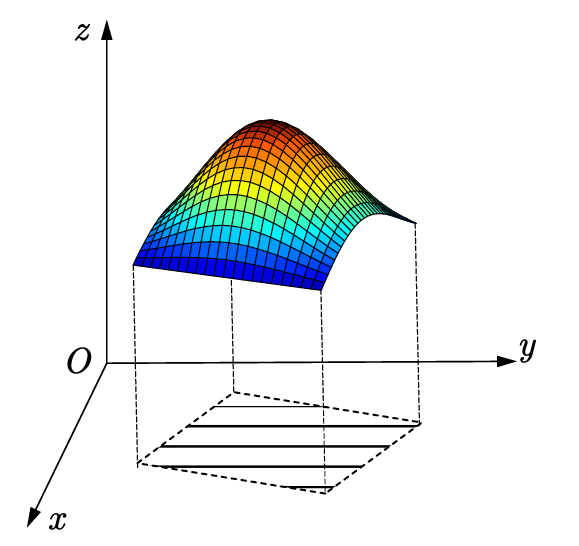
一元函数定积分的基本概念:求曲线下的面积
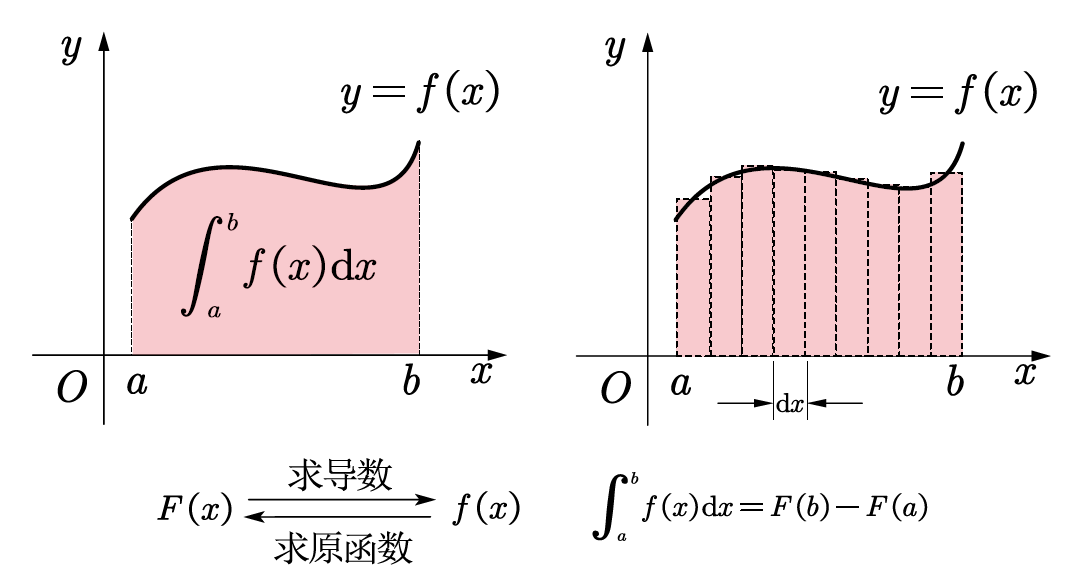
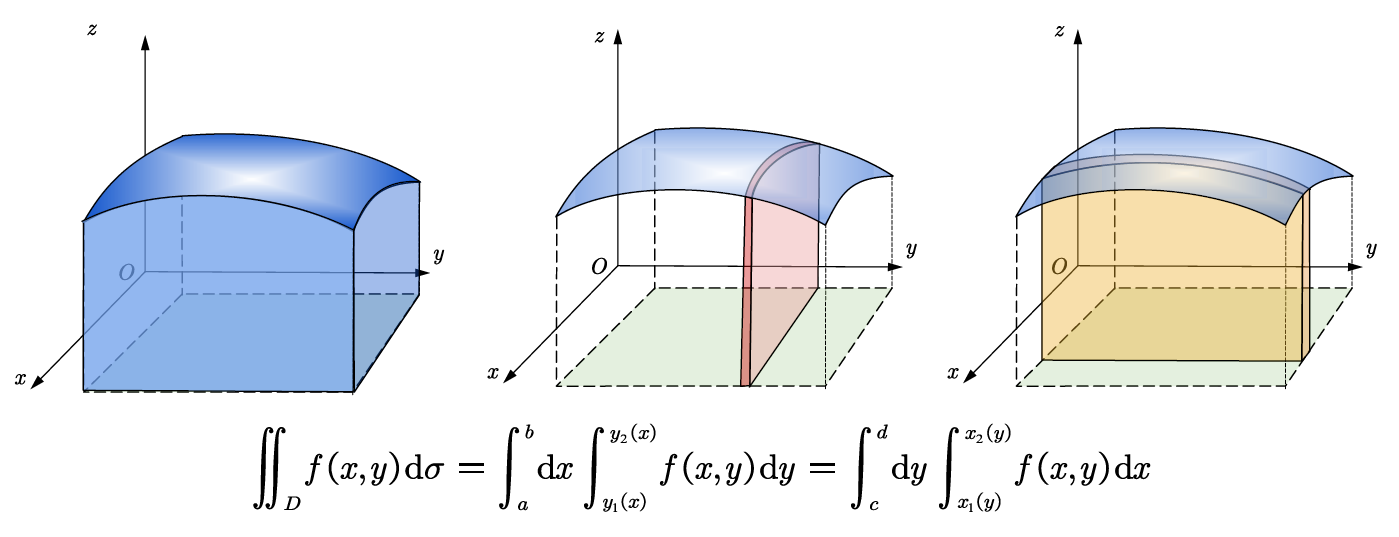
二重积分的基本概念:求曲面下的体积
8.2 三重积分
8.3 重积分的应用
(1) 曲面面积:\(A = \displaystyle\iint_D \sqrt{1+(\dfrac{\partial f}{\partial x})^2 + (\dfrac{\partial f}{\partial y})^2} \text{d}x\text{d}y\)
(2) 质量与质心:\(m = \displaystyle\iint_D \rho(x,y) \text{d}\sigma, \bar{x} = \dfrac{1}{m} \displaystyle\iint_D x \rho(x,y) \text{d}\sigma, \bar{y} = \dfrac{1}{m} \displaystyle\iint_D y \rho(x,y) \text{d}\sigma\)
(3) 转动惯量:\(I_x = \displaystyle\iint_D y^2 \rho(x,y) \text{d}\sigma, I_y = \displaystyle\iint_D x^2 \rho(x,y) \text{d}\sigma\)
9 曲线积分与曲面积分
9.1 曲线积分
9.1.1 第一类曲线积分
对弧长的曲线积分,也叫做第一类曲线积分,解决的问题如下:
一段绳子,其形状为抛物线\(y = x^2(0 \leq x \leq 1)\),其线密度(指单位长度所具有的质量)随发生变化,\(\rho = \sqrt{y}\),求这段绳子的质量。
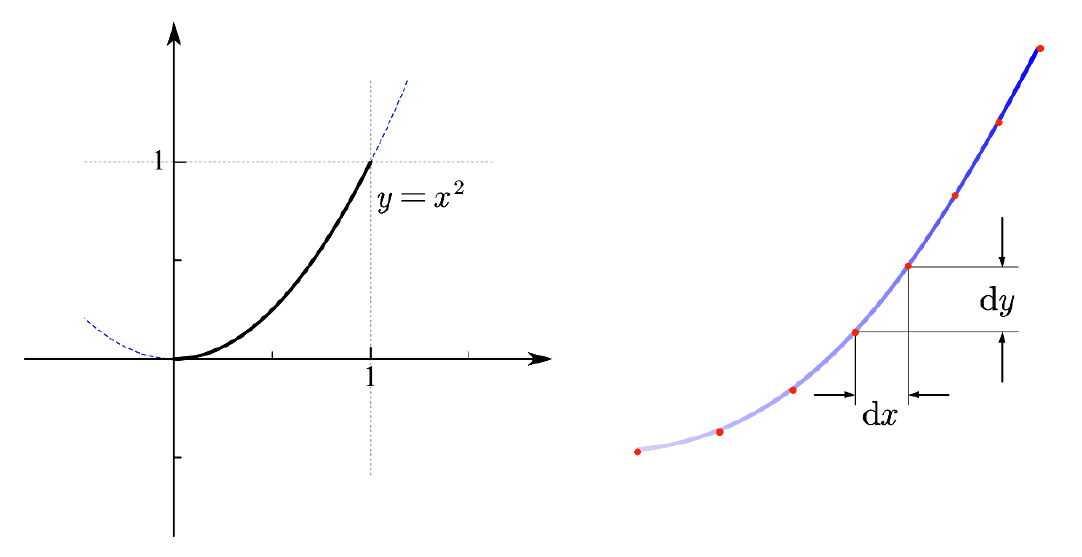
每一个子段的长度:\(\text{d}s = \sqrt{(\text{d}x)^2 + (\text{d}y)^2} = \sqrt{1+(\dfrac{\text{d}y}{\text{d}x})^2}\text{d}x = \sqrt{1+(y')^2} \text{d}x\)
每一个子段的质量:\(\rho \text{d}s = \sqrt{y} \cdot \sqrt{1+(y')^2} \text{d}x\)
曲线段总质量:\(\displaystyle\int_L \rho \text{d}s = \displaystyle\int_0^1 \sqrt{y} \cdot \sqrt{1+(y')^2} \text{d}x\)
在抛物线上,\(y = x^2, y' = 2x\),于是:
“\(\displaystyle\int_L \rho \text{d}s\)”就代表了第一类曲线积分,其特征是:
\(L\)代表着平面上的一段曲线,\(\rho\)代表着被积函数,\(\text{d}s\)是微元曲线段的长度。
对弧长的曲线积分计算分两步走:
-
画出所积曲线,转化为定积分:
- \(\text{d}s = \sqrt{(\text{d}x)^2 + (\text{d}y)^2} = \sqrt{1+(\dfrac{\text{d}y}{\text{d}x})^2}\text{d}x = \sqrt{1+(\dfrac{\text{d}x}{\text{d}y})^2}\text{d}y = \sqrt{(\dfrac{\text{d}x}{\text{d}t})^2+(\dfrac{\text{d}y}{\text{d}t})^2}\text{d}t\)
-
计算定积分
9.1.2 第二类曲线积分
对坐标的曲线积分,也叫做第二类曲线积分,解决的问题如下:
9.1.3 两类曲线积分的联系与区别
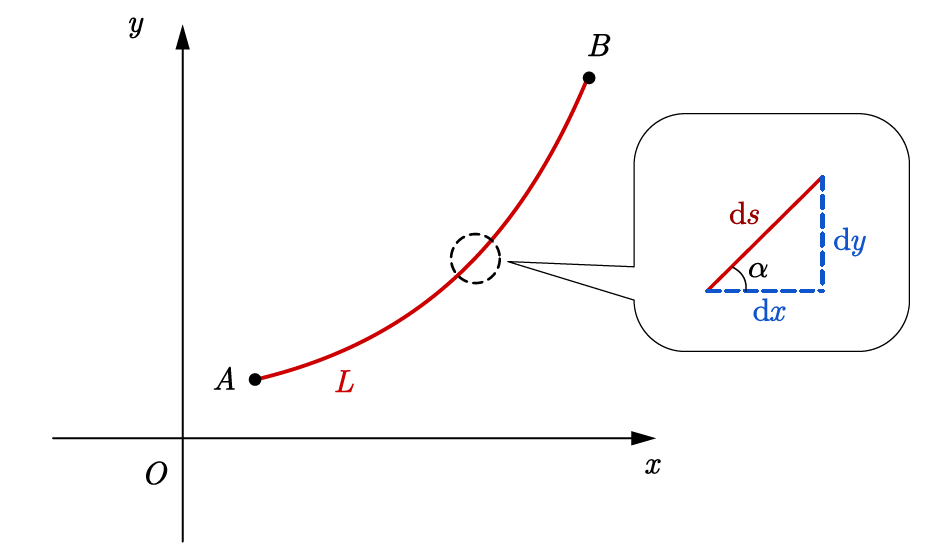
(1) 积分元素之间的差别
对弧长的曲线积分,积分元素为\(\text{d}s\)(上图中的红色元素)
对坐标的曲线积分,积分元素为\(\text{d}x\)、\(\text{d}y\)(上图中的蓝色元素)
从图中我们不难看出两者之间的联系:
所以两种积分之间的关系为:
(2) 积分上下限的区别:
- 对弧长的曲线积分,曲线段不具有方向性;
- 对坐标的曲线积分,曲线段必须具有方向性。
9.2 格林公式
格林公式:设闭区域\(D\)是由分段光滑的曲线\(L\)围成,函数\(P(x,y)\)和\(Q(x,y)\)在\(D\)上具有一阶连续偏导数,则有:
其中\(L\)是的\(D\)的取正向的边界曲线。
所谓的正向边界,可以这样理解:沿着\(L\)移动时,区域\(D\)始终在其左侧。如下图所示,左图为单连通区域,右图为复连通区域:
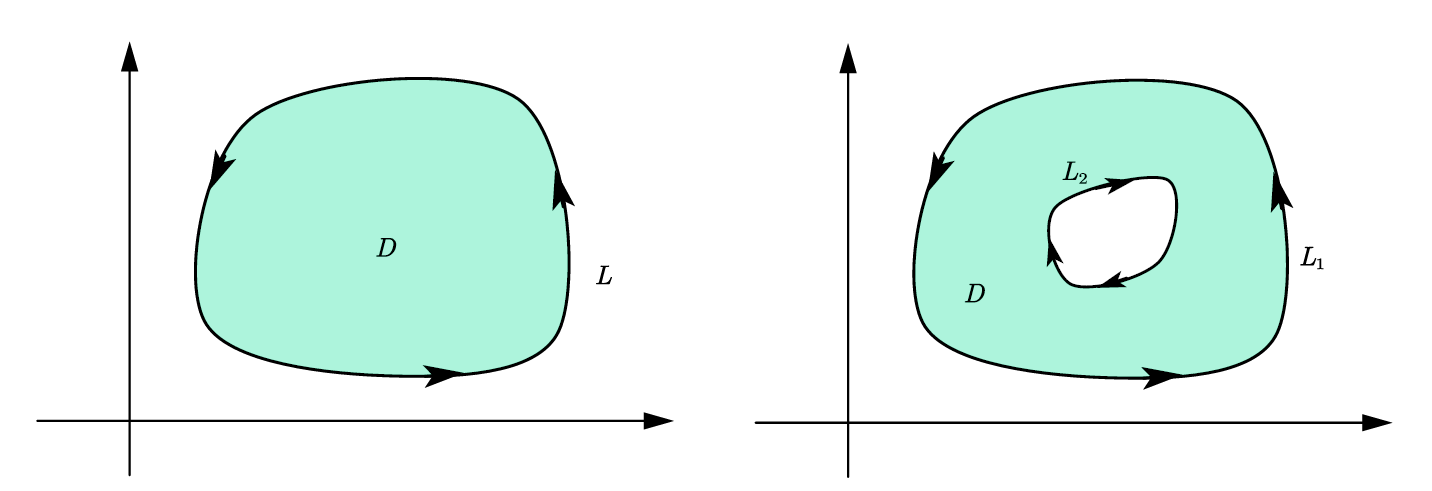
单连通区域:说白了,就是没有“洞”的一块区域,逆时针沿着它的边界就是正向的;
复连通区域:有“洞”,所以边界由两类组成,一个是外侧的边界,一个是“洞”的边界,外侧边界逆时针再加上内侧的顺时针,就形成了其正向的边界曲线。
格林公式架起了一座桥梁,是我们能够实现二重积分与(封闭曲线的)线积分之间的转换。
格林公式的应用:换积分路径,使积分简化
9.3 曲面积分
9.3.1 第一类曲面积分
【求密度不均匀的曲面质量】对面积的曲面积分,也被称为第一类曲面积分,它是用于解决下面这类问题:
空间中有一曲面\(\Sigma\),其方程为\(z = z(x,y)\),该曲面在\(xOy\)平面上的投影为\(D_{xy}\)。该曲面具有一定的质量,且其面密度\(\rho\)(单位为:质量/面积)是随着空间位置而发生改变的,即\(\rho = \rho(x,y,z)\),那么该曲面的质量为:
为了计算上面这个积分,我们需要将其转化为\(xOy\)平面上的二重积分:
- 将积分区域\(\Sigma\)曲面,确定其在\(xOy\)平面上的投影;
- 将被积函数\(\rho(x,y,z)\)表达式中的\(z\)替换为\(x\)、\(y\)的表达式\(z(x,y)\);
- 将\(\mathrm{d}S\)转化为\(\sqrt{1 + (\dfrac{\partial z}{\partial x})^2 + (\dfrac{\partial z}{\partial x})^2} \text{d}x \text{d}y\);
9.3.2 第二类曲面积分
【求通过某一个界面的流量】对坐标的曲面积分,也叫第二类曲面积分。
在空间中有一曲面\(\Sigma\),同时存在物质流动的向量场\(\vec{v} = (v_x, v_y, v_z)\),此时怎样表示流过该界面的流量?
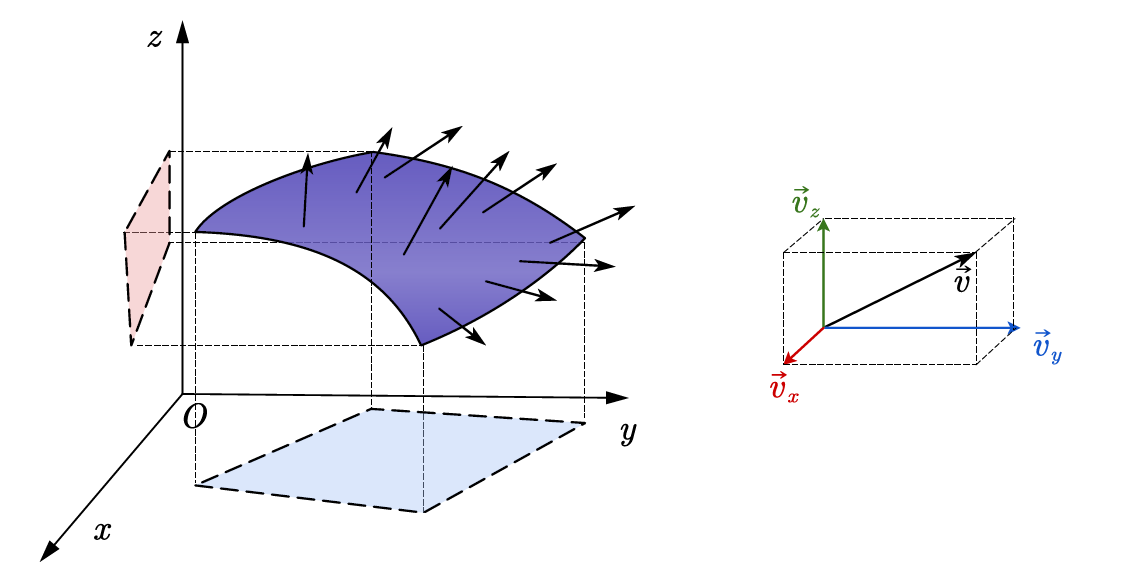
此时流过该界面的流量为:
注意:流量是具有方向性的(从一侧到另一侧),所以在解决问题时,需要点明该界面的正方向。
解决对坐标曲面积分的步骤:
- 确定积分曲面在坐标面上的投影区域;
- 根据曲面的指定方向,来确定正负号;
- 转化并计算投影区域上的二重积分。
9.5 高斯公式
高斯公式:将封闭曲面上对坐标的曲面积分,转化为体积分。
空间闭区域\(\Omega\)是由分片光滑的闭曲面\(\Sigma\)所围成,如果函数\(P(x,y,z),Q(x,y,z),R(x,y,z)\)在上具有一阶连续偏导数,则有:
注意,右侧是对\(\Omega\)的外侧曲面积分(如果是内侧,则取相反数)。
10 无穷级数
10.1 常数项级数
常见的级数:
- 等比级数:\(\sum\limits_{n=0}^{\infty}a_0 q^n(a_0q \neq 0)\),收敛条件:\(|q|<1\)
- 调和级数(发散):\(\sum\limits_{n=1}^{\infty} \dfrac{1}{n} = \dfrac{1}{1} + \dfrac{1}{2} + \dfrac{1}{3} + \cdots\)
- \(p\)级数:\(\sum\limits_{n=1}^{\infty} \dfrac{1}{n^p}\),当\(p>1\)时收敛,当\(p \leq 1\)时发散。
10.2 正项级数常用的审敛方法
(1) 极限审敛法
设正项级数\(\sum\limits_{i=1}^{\infty} u_i\)
- 如果\(\lim\limits_{n \to \infty} nu_n = l>0\),那么级数\(\sum\limits_{i=1}^{\infty} u_i\)发散;
- 如果\(\lim\limits_{n \to \infty} n^pu_n = l,(0\leq l <+\infty,p>1)\),那么级数收敛。
极限审敛法的本质就是判断在\(n \to \infty\)时,\(u_n\)的大小与\(\dfrac{1}{n}\)相比是高阶无穷小还是同/低阶无穷小。
(2) 比值审敛法(又称:达朗贝尔判别法)
设正项级数\(\sum\limits_{i=1}^{\infty} u_i\),令\(\lim\limits_{n \to \infty} \dfrac{u_{n+1}}{u_n} = \rho\)
- 当\(\rho < 1\)时,该级数收敛;
- 当\(\rho > 1\)时,该级数发散;
- 当\(\rho = 1\)时,那么级数可能发散也可能收敛,需要利用其他方法判定。
(3) 比较审敛法
设正项级数\(\sum\limits_{i=1}^{\infty} u_i\)、\(\sum\limits_{i=1}^{\infty} v_i\),有\(u_n \leq v_n\)
- 如果级数\(\sum\limits_{i=1}^{\infty} v_i\)收敛,则级数\(\sum\limits_{i=1}^{\infty} u_i\)也收敛;
- 如果级数\(\sum\limits_{i=1}^{\infty} u_i\)收敛发散,则级数级数\(\sum\limits_{i=1}^{\infty} v_i\)收敛也发散。
我们常拿调和级数和\(p\)级数来作为比较对象。
10.3 3类级数
10.3.1 正项级数
如果\(u_n \geq 0\),则\(\sum\limits_{i = 1}^{\infty}u_i\)为正项级数;
10.3.2 交错级数
(一) 交错级数的定义
如果\(u_n \geq 0\),则\(\sum\limits_{i = 1}^{\infty}(-1)^n u_i\)或\(\sum\limits_{i = 1}^{\infty}(-1)^{n+1} u_i\)称为交错级数。
(二) 交错级数的收敛性
我们刚才探讨的都是正项级数,接下来看一下如果判断交错级数的收敛性:
如果交错级数满足条件\(u_n \geq u_{n+1}\),\(\lim\limits_{n \to \infty} u_n = 0\),那么该级数收敛。
(三) 绝对收敛和条件收敛
绝对收敛:如果交错级数各项均取绝对值,级数收敛,那么称该级数绝对收敛;
条件收敛:如果交错级数级数不满足绝对收敛,但是原级数本身是收敛的,那么称该级数条件收敛。
10.3.3 幂级数
(一) 幂级数
阿贝尔定理:对于幂级数\(\sum\limits_{n=1}^{\infty} a_n x^n\),当\(x = x_0\)时收敛,那么当\(|x| < |x_0|\)时该幂级数一定是绝对收敛的;反之当\(|x| = |x_0|\)时发散,那么当\(|x| > |x_0|\)时该幂级数一定是发散的。
阿贝尔定理给我们的启示:幂级数收敛对应的开区间应是关于0点对称的,而在区间的边界上则有可能出现绝对收敛、条件收敛、发散。
(二) 幂级数收敛半径
定义幂级数的收敛半径为\(R(R\geq 0)\),即意味着当\(x \in (-R, R)\)时,该幂级数收敛。
结合正项技术的比值审敛法,我们可以利用下面的极限式快速求出一个幂级数的收敛半径:
对于幂级数\(\sum\limits_{n=1}^{\infty} a_n x^n\),则有收敛半径:
需要注意的是,如果求得\(R = 0\),则意味着该幂级数仅当\(x = 0\)时才收敛;如果求得\(R = +\infty\),则意味着实数范围内皆可以使该幂级数收敛。
注意:主流教材中采用的过程是\(\rho = \lim_{n\to \infty}\left|\dfrac{a_{n+1}}{a_{n}} \right|\),\(R = \dfrac{1}{\rho}\),其本质上没有什么区别。
(三) 常见函数的幂级数展开(泰勒展开)
我们需要把握下列常见函数的泰勒级数,需要留意该级数的适用条件,即对应的收敛区间:
- 如何方便记忆上面这些常见的泰勒公式:
- (1) 利用奇偶性:如果左侧函数为奇函数,则右侧仅含有的奇次项;如果左侧函数为偶函数,则右侧仅含有的偶次项。
- (2) 利用拓展性:已知\(\dfrac{1}{1-x}=1+x+x^{2}+x^{3}+\cdots+x^{n}+\cdots\), 则令式中的\(x\)换成\(-x\),就可以得到\(\dfrac{1}{1+x}=1-x+x^{2}-x^{3}+\cdots+(-x)^{n}+\cdots\)
- (3) 利用导数和原函数的关系:例如\(\cos x = (\sin x)'\),所以两者的展开式也是导数的关系。
11 微分方程
11.1 微分方程概述
要了解微分方程,得从微分说起,微分的核心是变化率。就比如速度\(v = \dfrac{\text{d}x}{\text{d}t}\),即每一时刻距离的变化;而加速度\(a = \dfrac{\text{d}v}{\text{d}t}\),即每一时刻速度的变化。
有了这个概念后,我们再来看微分方程,简单来说就是由变化率构成的一个方程。其使用场景为:描述相对变量比绝对量更容易时。
微分方程分为两部分:
- 常微分方程(Ordinary Differential Equations, ODE):函数自变量只有一个,如:\(y'(x) = py + q\);
- 偏微分方程(Partial Differential Equations, PDE):函数有多个自变量,如:\(\dfrac{\partial T}{\partial t}(x, y, t)=\dfrac{\partial^{2} T}{\partial x^{2}}(x, y, t)+\dfrac{\partial^{2} T}{\partial y^{2}}(x, y, t)\)
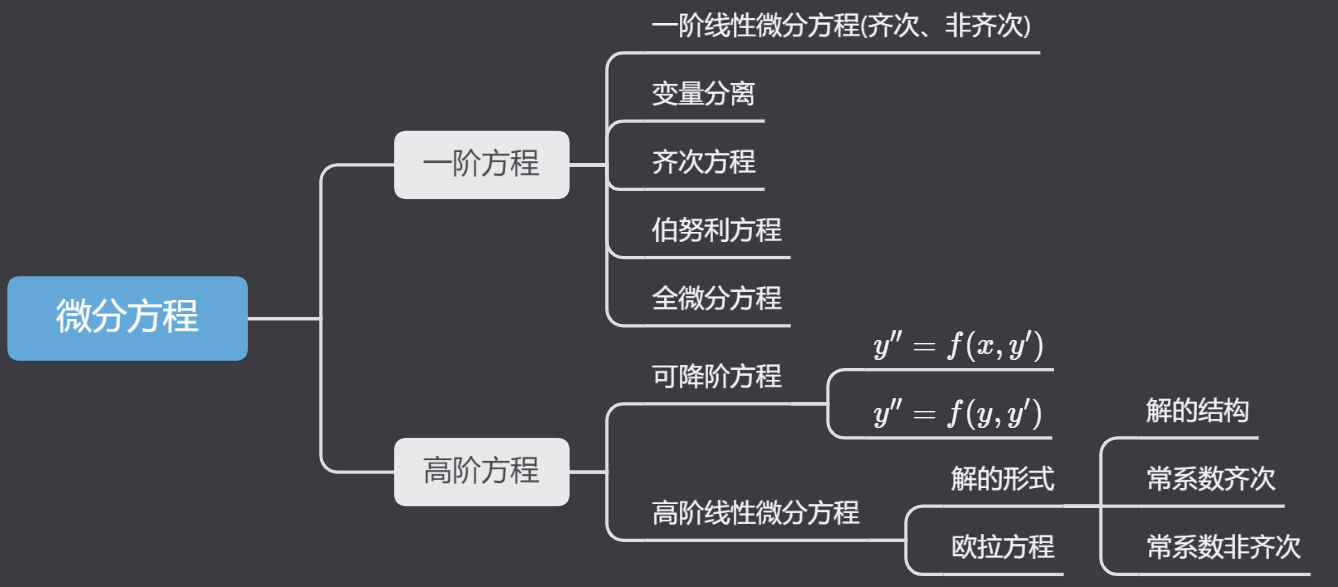
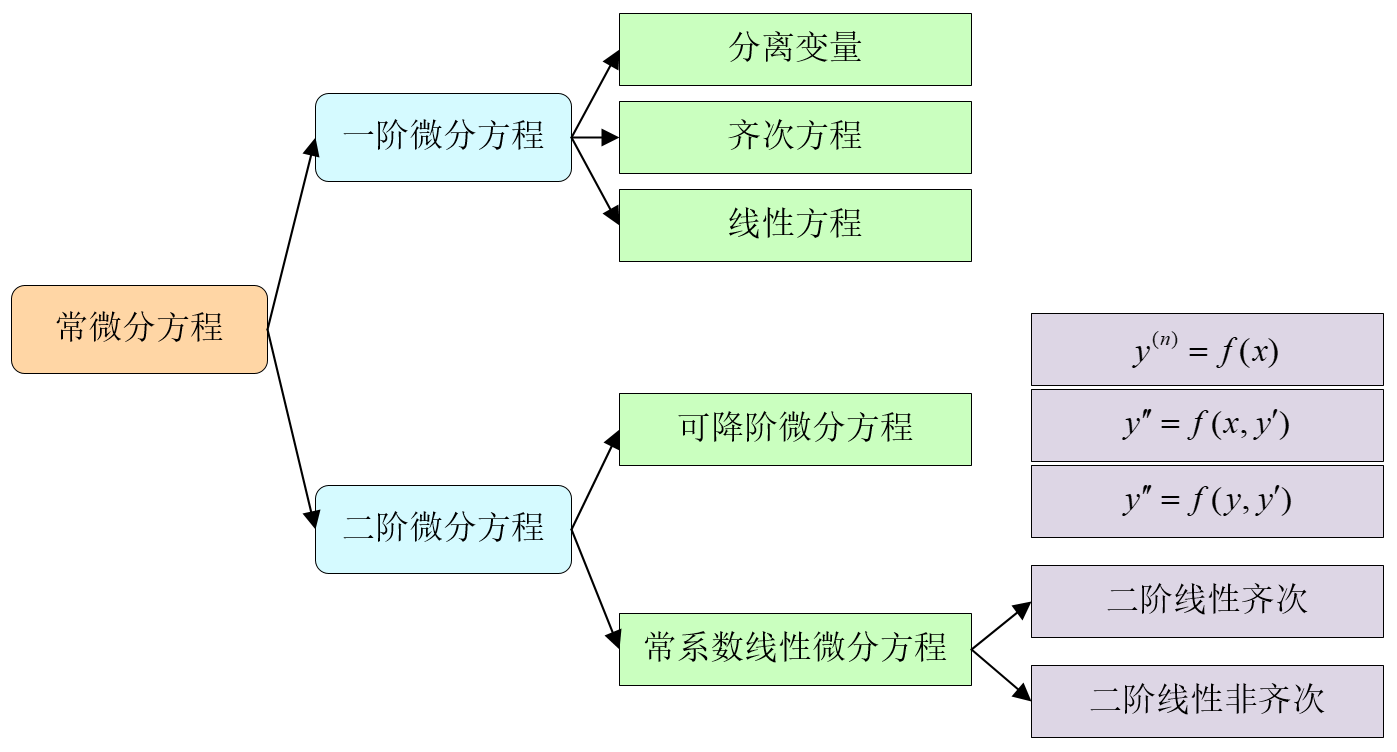
微分方程也可以分为一阶方程和高阶方程,具体的组成(解法)如下图:
11.2 一阶方程
11.2.1 一阶线性微分方程
形如:
- 当\(q(x) = 0\)时,为一阶线性齐次微分方程;
- 当\(q(x) \neq 0\)时,为一阶线性非齐次微分方程。
通解为:
11.2.2 变量可分离
形如:
解法:
就是将\(\text{d}y\)与\(\text{d}x\)移到一边,其余的移动到另外一边。
11.2.3 齐次方程
形如:
解法:
- STEP1:令\(\dfrac{y}{x} = u\),则\(\text{d}y = u\text{d}x + x\text{d}u\)
- STEP2:代入原方程。
11.2.4 伯努利方程
形如:
解法:
- STEP1:等式两边同时除\(y^n\),得到:\(y^{-n}y' + y^{1-n}p(x) = q(x)\)
- STEP2:令\(y^{1-n} = u\)
- STEP3:对第二步得到的结果求导:\((1-n)y^{-n}y' = \dfrac{\text{d}u}{\text{d}x} \to y^{-n}y' = \dfrac{u'}{1-n} = \dfrac{1}{1-n} \dfrac{\text{d}u}{\text{d}x}\)
- STEP4:将STEP3结果与STEP2结果代入STEP1:\(\dfrac{1}{1-n} \dfrac{\text{d}u}{\text{d}x} + up(x) = q(x)\)
- STEP5:接着依据STEP4的情况来选择使用什么通解公式求解。
11.2.5 全微分方程
形如:
就是说函数\(P\)和函数\(Q\)都是包含了\(x\)和\(y\)的。
解法:
(1) 线积分法:\(\Phi(x,y) = \displaystyle\int_{x_0}^x P(x,y) \text{d}x + \displaystyle\int_{y_0}^y Q(x,y) \text{d}y\)或者\(\Phi(x,y) = \displaystyle\int_{(x_0, y_0)}^{(x,y)} P(x,y) \text{d}x + Q(x,y) \text{d}y\)
(2) 偏积分法:\(\dfrac{\partial \Phi}{\partial x} = P(x,y), \dfrac{\partial \Phi}{\partial y} = Q(x,y)\),第一个等式对\(x\)积分得到:\(\Phi(x,y) = \displaystyle\int P(x,y) \text{d}x + \psi(y)\),代入第二个等式求\(\psi(y)\),即可得\(\Phi(x,y)\)
(3) 凑微分法:凑微分得到\(\Phi(x,y)\)
11.3 高阶方程
11.3.1 可降阶方程
(一) \(y'' = f(x, y')\)
解法:
- STEP1:令\(y' = P(x)\),则\(y'' = P'(x)\)
- STEP2:代入原方程:\(P'(x) = f(x, P(x))\),求得\(P(x)\)
- STEP3:将\(P(x)\)积分求得通解
(二) \(y'' = f(y, y')\)
解法:
- STEP1:令\(y' = P(y)\),则\(y'' = \dfrac{\text{d} P}{\text{d} y} \dfrac{\text{d} y}{\text{d} x} = P \dfrac{\text{d} P}{\text{d} y}\)
- STEP2:代入原方程:\(P\dfrac{\text{d} P}{\text{d} y} = f(y, P(y))\),求得\(P(y)\)
- STEP3:将\(P(y)\)积分求得通解
11.3.2 高阶常系数微分方程
定义:
- 若\(f(x) = 0\),则为齐次方程
- 若\(f(x) \neq 0\),则为非齐次方程
11.1 一阶微分方程
11.1.1 分离变量法
将变量分离到等号两侧,两侧分别进行积分。
11.1.2 齐次方程变量替换法
题目特征:无法直接分离变量,但是方程中每项变量次数相同。
设\(u = \dfrac{y}{x}\),将\(y = ux, \text{d}y = u\text{d}x + x\text{d}u\)代入方程中,再分离变量求解。
11.1.3 线性微分方程
分为齐次线性方程和非齐次方程
形如\(\dfrac{\text{d}y}{\text{d}x} + P(x)y = Q(x)\)的均为一阶线性微分方程,如果\(Q(x) = 0\)则为齐次型,否则就是非齐次的。
求解线性齐次方程比较容易,直接利用分离变量法即可:
而求解非齐次方程,可以用下列两种方法:
-
公式法
- \(\dfrac{\text{d}y}{\text{d}x} + P(x)y = Q(x)\),解为:\(y = e^{\int P(x) \text{d}x} \left[\int Q(x) e^{\int P(x) \text{d}x} \text{d}x + C\right]\)
-
常数变易法
先将非齐次方程看作为齐次方程(将\(Q(x)\)看作0),得到齐次方程的解后,将常数\(C\)变为\(C(x)\),再代回原非齐次方程,进而求解(具体步骤见例题)。
11.2 二阶微分方程
二阶微分方程,方程中涉及二阶导数\(y''\),求\(y = f(x)\)
(一) 最简单的二阶微分方程:\(y'' = f(x)\),方程中没有\(y\)和\(y'\),对\(f(x)\)求两次不定积分就可以;
(二)可降阶的二阶微分方程:
- ① 方程中没有\(y\),表达式为\(y'' = f(x, y')\),则设\(y' = p, y'' = \dfrac{\text{d}p}{\text{d}x}\);
- ② 方程中没有\(x\),表达式为\(y'' = f(y, y')\),则设\(y' = p, y'' = p\dfrac{\text{d}p}{\text{d}y}\)。
(三) 齐次线性微分方程:
方程形式为:\(y'' + p y' + qy = 0\),\(p,q\)皆为常数。求解时,需要求解一个特征方程:\(r^2 + pr + q = 0\),根据该二次方程的解存在情况分类讨论:
| 特征方程\(r^2 + pr + q = 0\)的根 | 微分方程\(y'' + py' + qy = 0\)的解 |
|---|---|
| 两个不相等实数根:\(r_1, r_2\) | \(y = C_1 e^{r_1 x} + C_2 e^{r_2 x}\) |
| 两个相等实数根:\(r_1 = r_2\) | \(y = (C_1 + C_2 x)e^{r_1 x}\) |
| 两个复数根:\(r_1 = \alpha + \beta i, r_2 = \alpha - \beta i\) | \(y = e^{ax}(C_1 \cos \beta x + C_2 \sin \beta x)\) |
(四) 非齐次线性微分方程
化为齐次,然后使用常数易变法。
微分方程的相关资料:
本文资料链接
课程链接:https://www.bilibili.com/video/BV1ZK4y1u7WU?spm_id_from=333.999.0.0
PDF资料链接:链接:https://pan.baidu.com/s/1z_c5CXrbCEdfsTktG-x6lw 提取码:41vd

 浙公网安备 33010602011771号
浙公网安备 33010602011771号