
梯度下降-Momentum
链接:https://zhuanlan.zhihu.com/p/21475880
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
为了保证完整性,今天再扯一下另外一个在梯度下降中十分重要的东西,那就是冲量——momentum。
这是一个十分神秘的变量,我也只能以最简单的方式理解它,于是在这里班门弄斧了。正如它的中文名字一样,在优化求解的过程中,冲量扮演了对之前优化量的持续发威的推动剂。一个已经完成的梯度+步长的组合不会立刻消失,只是会以一定的形式衰减,剩下的能量将继续发挥余热。我们先不加解释的给出基于冲量的梯度下降的代码:
def momentum(x_start, step, g, discount = 0.7):
x = np.array(x_start, dtype='float64')
pre_grad = np.zeros_like(x)
for i in range(50):
grad = g(x)
pre_grad = pre_grad * discount + grad
x -= pre_grad * step
print '[ Epoch {0} ] grad = {1}, x = {2}'.format(i, grad, x)
if abs(sum(grad)) < 1e-6:
break;
return x
那么冲量究竟有什么作用呢?今天主要扯它其中的一个作用,那就是帮助你穿越“山谷”。怎么来理解穿越“山谷”呢?先来一个待优化函数。这次的问题相对复杂些,是一个二元二次函数:
def f(x):
return x[0] * x[0] + 50 * x[1] * x[1]
def g(x):
return np.array([2 * x[0], 100 * x[1]])
xi = np.linspace(-200,200,1000)
yi = np.linspace(-100,100,1000)
X,Y = np.meshgrid(xi, yi)
Z = X * X + 50 * Y * Y
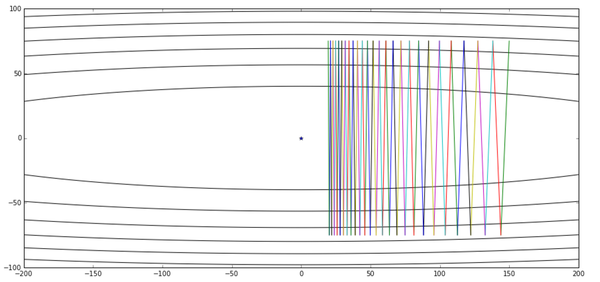
上面这个函数在等高线图上是这样的:
 其中中心的蓝色点表示了最优值。我们根据这个图发挥下想象,这个函数在y轴十分陡峭,在x轴相对平缓些。好了话说完我们赶紧拿朴素梯度下降来尝试下:
其中中心的蓝色点表示了最优值。我们根据这个图发挥下想象,这个函数在y轴十分陡峭,在x轴相对平缓些。好了话说完我们赶紧拿朴素梯度下降来尝试下:
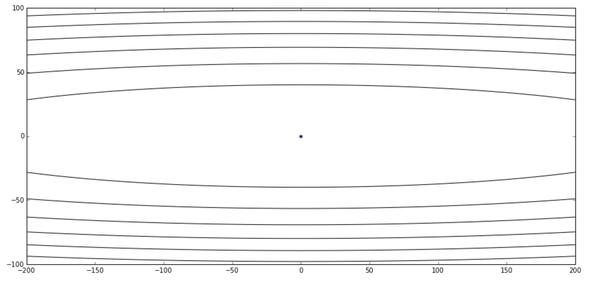
gd([150,75], 0.016, g)
经过50轮的迭代,他的优化过程图如下所示:
 可以看出我们从某个点出发,整体趋势向着最优点前进,这个是没有问题的,但是前进的速度似乎有点乏力,是不是步长又设小了?有了之前的经历,这一回我们在设置步长时变得小心了许多:
可以看出我们从某个点出发,整体趋势向着最优点前进,这个是没有问题的,但是前进的速度似乎有点乏力,是不是步长又设小了?有了之前的经历,这一回我们在设置步长时变得小心了许多:
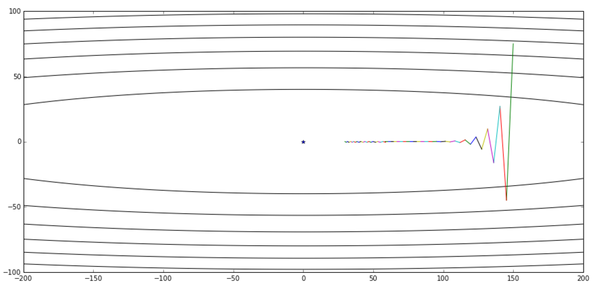
res, x_arr = gd([150,75], 0.019, g)
contour(X,Y,Z, x_arr)
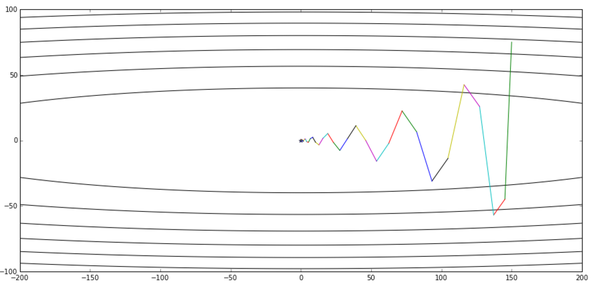
 好像成效不是很明显啊,而且优化的过程中左右来回抖是怎么回事?看着这个曲线让我想起了一个极限运动:
好像成效不是很明显啊,而且优化的过程中左右来回抖是怎么回事?看着这个曲线让我想起了一个极限运动:
 (来自网络,如有侵权立即删除)
(来自网络,如有侵权立即删除)
没错,其实算法眼中的这个函数很这张图很像,而算法也果然没有让大家“失望”,选择了一条艰难的道路进行优化——就像从一边的高台滑下,然后滑到另一边,这样艰难地前进。没办法,这就是梯度下降法。在它的眼中,这样走是最快的,而事实上,每个优化点所对应的梯度方向也确实是那个方向。
大神们这时可能会聊起特征值的问题,关于这些问题以后再说。好吧,现在我们只能继续挑步长,说不定步长再大点,“滑板少年”还能再快点呢!
res, x_arr = gd([150,75], 0.02, g)
contour(X,Y,Z, x_arr)
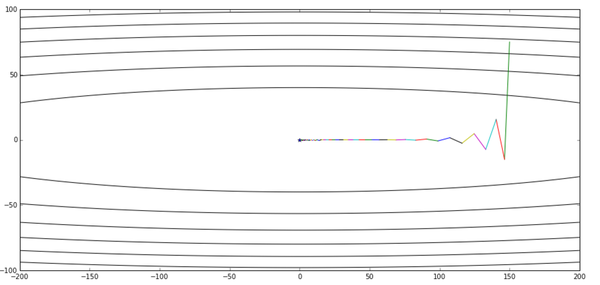
 好吧……我们的滑板少年已经彻底玩脱了……这已经是我们能设的最大的步长了(上一次关于步长和函数之间的关系在这里依然受用),再设大些我们的滑板少年就飞出去了。对于这个问题,由于两个坐标轴方向的函数属性不同,为了防止在优化的过程中发散,步长只能够根据最陡峭的方向设定。当然,解决快速收敛这个问题还有其他的办法,这里我们看看冲量如何搞定这位滑板少年。
好吧……我们的滑板少年已经彻底玩脱了……这已经是我们能设的最大的步长了(上一次关于步长和函数之间的关系在这里依然受用),再设大些我们的滑板少年就飞出去了。对于这个问题,由于两个坐标轴方向的函数属性不同,为了防止在优化的过程中发散,步长只能够根据最陡峭的方向设定。当然,解决快速收敛这个问题还有其他的办法,这里我们看看冲量如何搞定这位滑板少年。
很自然地,我们在想,要是少年能把行动的力量集中在往前走而不是两边晃就好了。这个想法分两个步骤:首先是集中力量向前走,然后是尽量不要在两边晃。这时候,我们的冲量就闪亮登场了。我们发现滑板少年每一次的行动只会在以下三个方向进行:
- 沿-x方向滑行
- 沿+y方向滑行
- 沿-y方向滑行
我们可以想象到,当使用了冲量后,实际上沿-y和+y方向的两个力可以相互抵消,而-x方向的力则会一直加强,这样滑板少年会在y方向打转,但是y方向的力量会越来越小,但是他在-x方向的速度会比之前快不少!
好了,那我们看看加了冲量技能的滑板少年的实际表现:
momentum([150,75], 0.016, g)
 总算没有让大家失望,尽管滑板少年还是很贪玩,但是在50轮迭代后,他还是来到了最优点附近。可以说是基本完成了我们的任务吧。当然由于冲量的问题,前面几轮迭代他在y轴上玩得似乎比以前还欢乐,这个问题我们后面会提。但不管怎么说,总算完成目标了。
总算没有让大家失望,尽管滑板少年还是很贪玩,但是在50轮迭代后,他还是来到了最优点附近。可以说是基本完成了我们的任务吧。当然由于冲量的问题,前面几轮迭代他在y轴上玩得似乎比以前还欢乐,这个问题我们后面会提。但不管怎么说,总算完成目标了。
后来,又有高人发明了解决前面冲量没有解决的问题的算法,干脆不让滑板少年愉快地玩耍了,也就是传说中的Nesterov算法。这里就不细说了,有时间详细聊下。直接给出代码和结果:
def nesterov(x_start, step, g, discount = 0.7):
x = np.array(x_start, dtype='float64')
pre_grad = np.zeros_like(x)
for i in range(50):
x_future = x - step * discount * pre_grad
grad = g(x_future)
pre_grad = pre_grad * 0.7 + grad
x -= pre_grad * step
print '[ Epoch {0} ] grad = {1}, x = {2}'.format(i, grad, x)
if abs(sum(grad)) < 1e-6:
break;
return x
nesterov([150,75], 0.012, g)
 好了,滑板少年已经哭晕在厕所……
好了,滑板少年已经哭晕在厕所……
费了这么多话,我们总算把穿越“山谷”这件事情说完了,下面还要说一个数值上的事情。在CNN的训练中,我们的开山祖师已经给了我们冲量的建议配置——0.9(刚才的例子全部是0.7),那么0.9的冲量有多大量呢?终于要来点公式了……
我们用G表示每一轮的更新量,g表示当前一步的梯度量(方向*步长),t表示迭代轮数,表示冲量的衰减程度,那么对于时刻t的梯度更新量有:
那么我们可以计算下对于梯度g0对从G0到GT的总贡献量为
我们发现它的贡献是一个等比数列,如果=0.9,那么跟据等比数列的极限运算方法,我们知道在极限状态下,它一共贡献了自身10倍的能量。如果
=0.99呢?那就是100倍了。
那么在实际中我们需要多少倍的能量呢?
本文相关代码详见:https://github.com/hsmyy/zhihuzhuanlan/blob/master/momentum.ipynb
那么在实际中我们需要多少倍的能量呢?
本文相关代码详见:https://github.com/hsmyy/zhihuzhuanlan/blob/master/momentum.ipynb
posted on 2016-07-18 20:51 jungel24 阅读(14133) 评论(0) 编辑 收藏 举报


