
方向导数与梯度
方向导数
接着偏导数的基础,我们可以引出方向导数。
方向导数和偏导数的区别就是:方向不同。仅此而已。
我们常说的偏导数无非就是对x轴求偏导,对y求偏导。而方向导数则是对x轴与y轴之间的某一新方向求导数。
还是用一下上次的图,这里我在x轴和y轴之间的平面上自己画了一个方向,并且与x轴夹角为α。
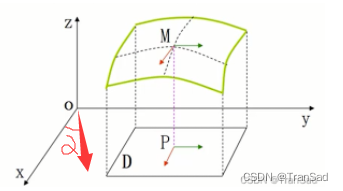
那么我们的z既然可以对x方向或y方向求偏导,自然也能对我新画的这个方向求“偏导”,这个“偏导”就是方向导数。
设这个新方向为l,因为这个方向导数和x与y轴有夹角关系,所以大可以用函数对x的偏导和y的偏导来表达,即:
 (这里的
(这里的![]() 是夹角α)
是夹角α)
这就是对l的方向导数。
梯度
直接上梯度定义公式:

我自己理解成是:对于x求偏导的结果与对y求偏导的结果的“向量和”。这并不一定是45度的,因为虽然两个偏导向量的夹角是90度,但大小不同。假如函数z此时在x方向上上升很快,则梯度会被拉偏至x轴。
某点的梯度,也就是函数在某点上升最快的方向。给了一个函数,其在各个点变化最快的方向就固定了,就是梯度方向。
梯度和方向导数又有什么关系呢?
我们知道方向导数,可以和x轴成意义夹角,可以表示为:

我们可以把它写成一个数量积的形式,即:

我们知道,两个向量相乘,可以写成向量1的模*向量2的模*它们的夹角
所以上式可以写成:

向量1我们直接取模,向量2是一个方向向量(模的值为1),最后cosθ就是这两个向量的夹角,其实也就是当前方向导数和梯度的夹角。
要使这个方向导数最大,只需要cosθ=1,θ=0,即方向导数和梯度方向一致。
所以有结论:方向导数最大的方向,也就是梯度方向。
以前对于这些概念总是模模糊糊的,虽然也知道一个大概的意思但是无法细想,这么整理下来就有条理一些。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号