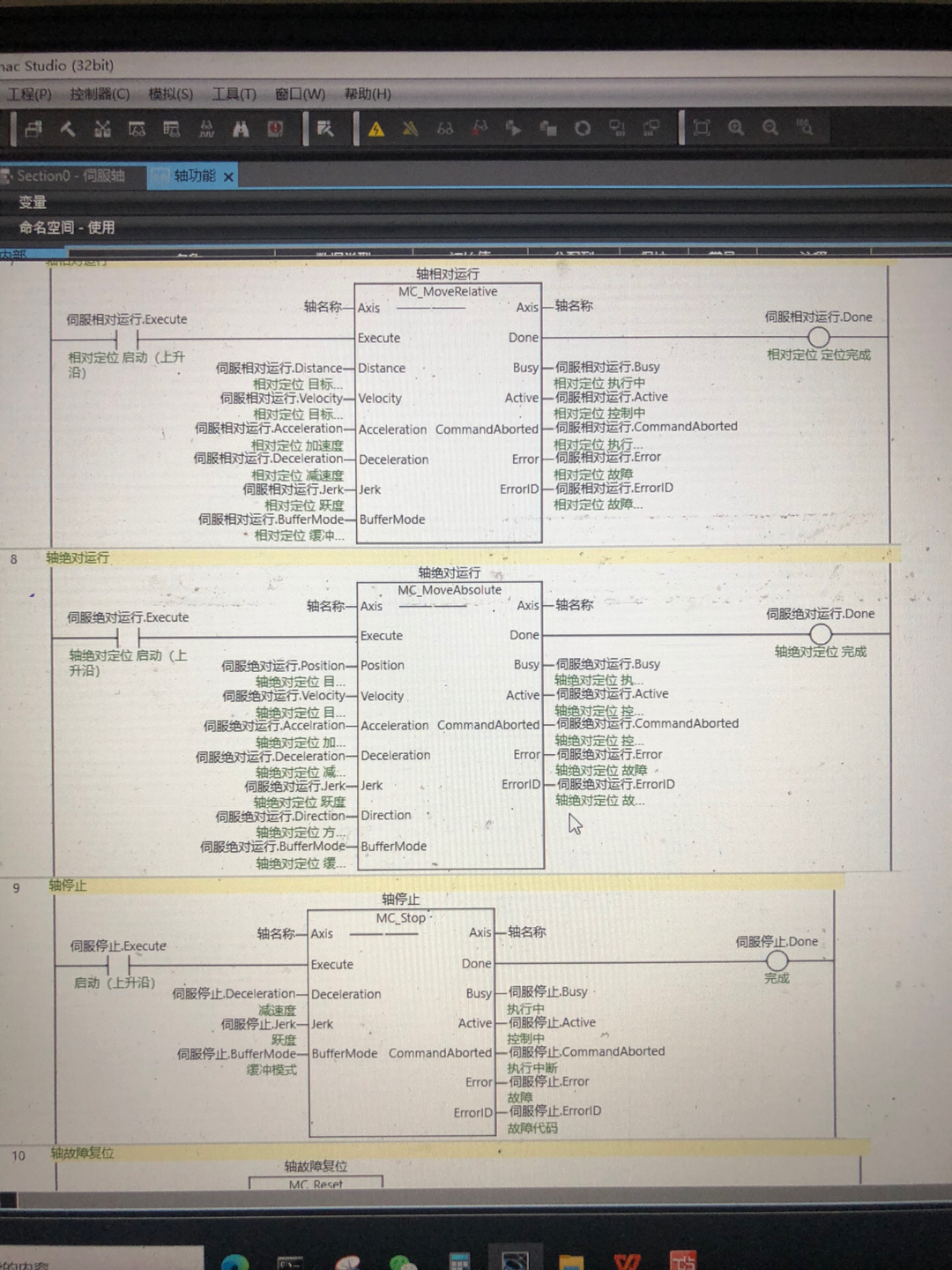
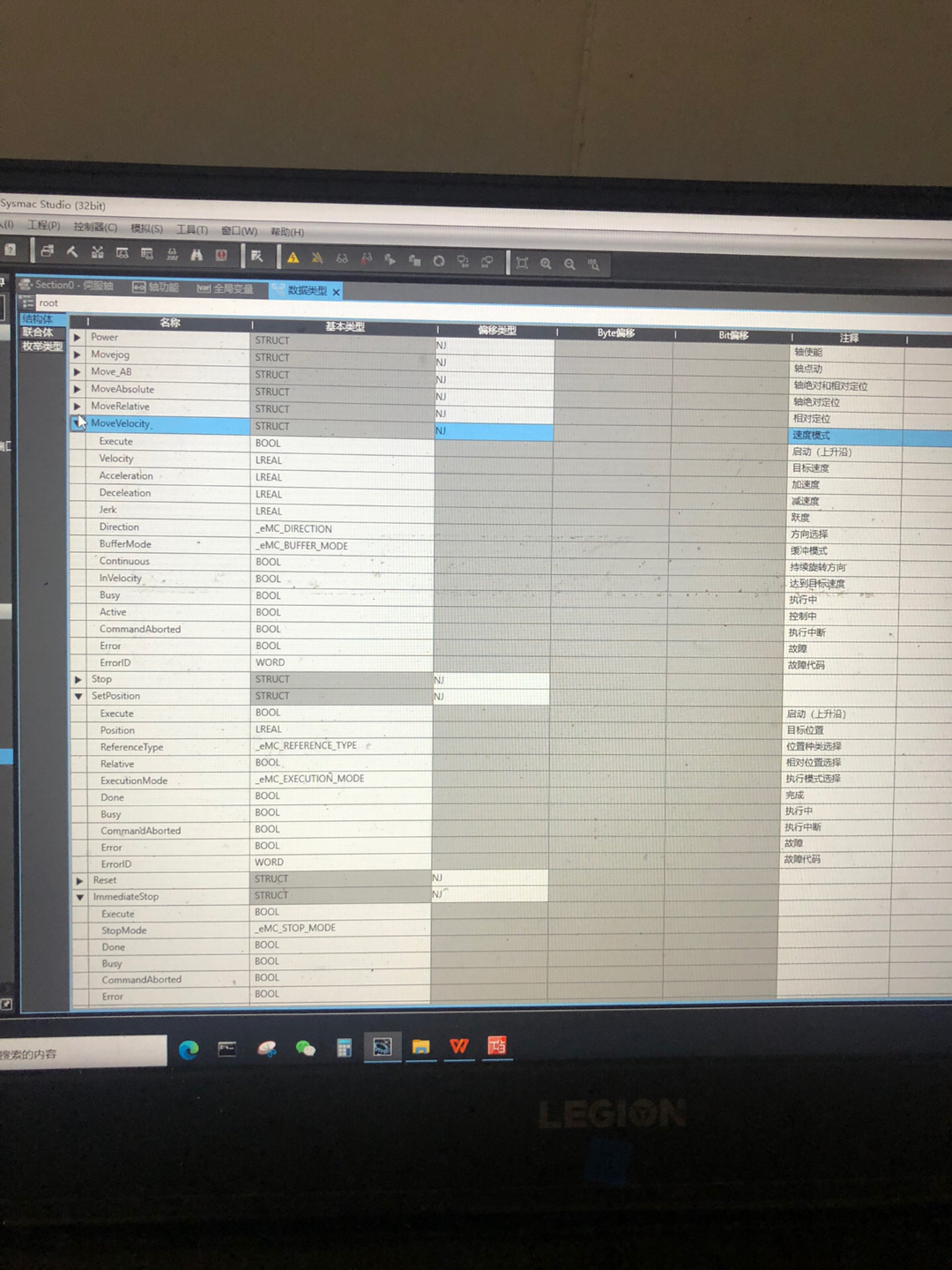
欧姆龙程序,Sysmac Studio伺服程序打包块,直接调用,并实现以下功能:
硬件:NJ101-1000 R88D-KN01H系列伺服
输入信号如下:
1:使能输入和故障复位。
2:点动正转和反转(速度可调)
3:回原点模式,参考图五传感器安装位置,
前极限?原点?后极限。
开始(高速)后退-原点感应或后极限感应-(慢速)前进-离开原点瞬间停止并清零当前位置(原点确认)。
4:绝对运行,必须回原点完成才能执行此模式(速度可调)。
5:上述三种模式有4种速度可设定。
点动速度?原点快速?原点慢速?绝对速度。
6:极限开关信号输入。
信号输出如下:
1:使能状态和故障错误信息。
2:当前速度和当前位置
3:连锁信号输出如下:
1: 点动前进中,不可执行其他模式。
2:点动后退中,不可执行其他模式。
3:原点定位中,不可执行其他模式。
4:绝对定位中,不可执行其他模式。
4:原点完成信号输出。
通过此封装块,直接驱动EherCat伺服
ID:3430655408672845