基于pybind11实现Python调用c++编写的CV算法--下 (Linux+Cmake)
C++ 是一种编译型(compiled)语言,设计重点是性能、效率和使用灵活性,偏向于系统编程、嵌入式、资源受限的软件和系统。
Python是一种解释型(interpreted)语言,同样也支持不同的编程范式。Python 内置了常用数据结构(str, tuple, list, dict),简洁的语法、丰富的内置库(os,sys,urllib,...)和三方库(numpy, tf, torch ...),功能强大。最为重要的是和能够和多种服务(flask…)和tensorflow、pytorch等无缝联合,从而方便将你的算法开放出去。
一方面,我们需要编译型语言(C++)性能;一方面,也需要解释型语言(Python)的灵活。这时,pybind11 可以用作 C++ 和 Python 之间沟通的桥梁。
Pybind11 是一个轻量级只包含头文件的库,用于 Python 和 C++ 之间接口转换,可以为现有的 C++ 代码创建 Python 接口绑定。Pybind11 通过 C++ 编译时的自省来推断类型信息,来最大程度地减少传统拓展 Python 模块时繁杂的样板代码, 已经实现了 STL 数据结构、智能指针、类、函数重载、实例方法等到Python的转换,其中函数可以接收和返回自定义数据类型的值、指针或引用。
由于在Windows上和在Linux上使用会有较大不同,所以我这里将分为两个部分来说明问题,本文为下篇,具体说明Linux+Cmake实现。
我认为在Linux上使用python调用c++函数更有现实价值,毕竟许多新的服务、深度运算等都是运行在linux上的。具体步骤可以参考如下。
下载pybind11git clone https://github.com/pybind/pybind11.git
安装pytestpip install pytest
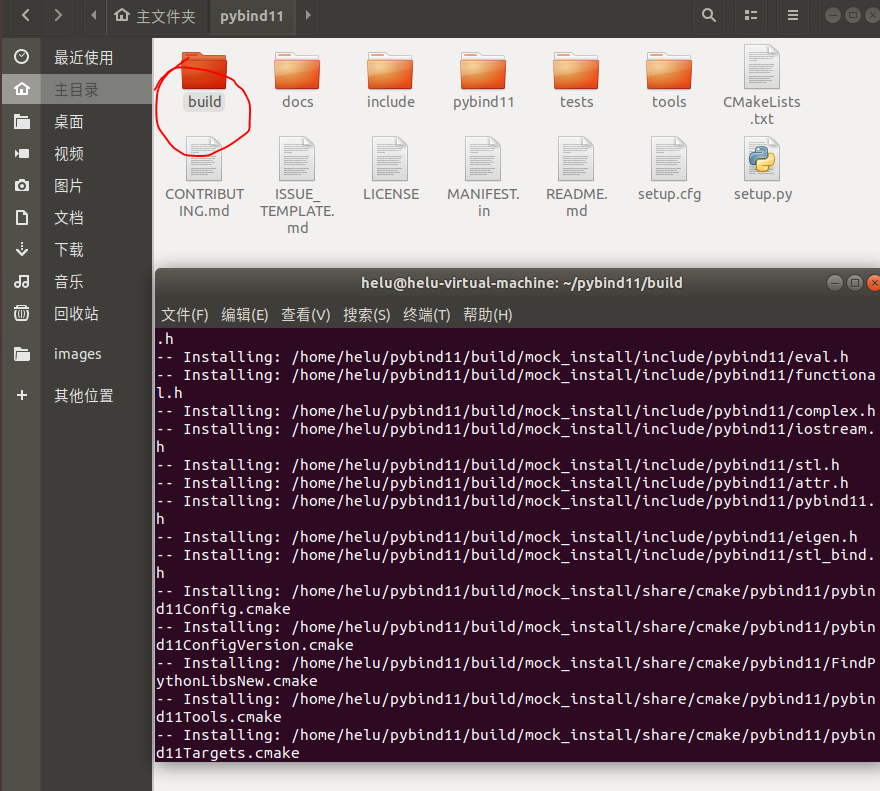
编译安装。这个地方我建议你首先将下载下来的pybind11备份一份
cd pybind11
mkdir build
cd build
cmake ..
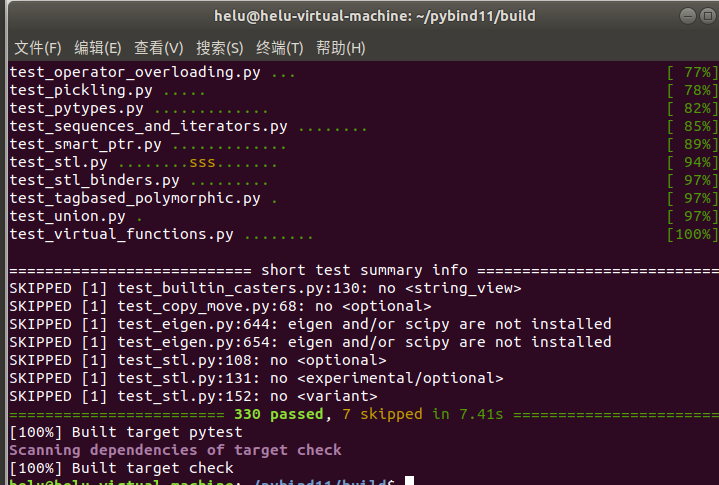
cmake
--
build .
--
config Release
--
target check
$ c
++
-
O3
-
Wall
-
shared
-
std
=
c
++
11
-
fPIC
`
python3
-
m pybind11
--
includes
`
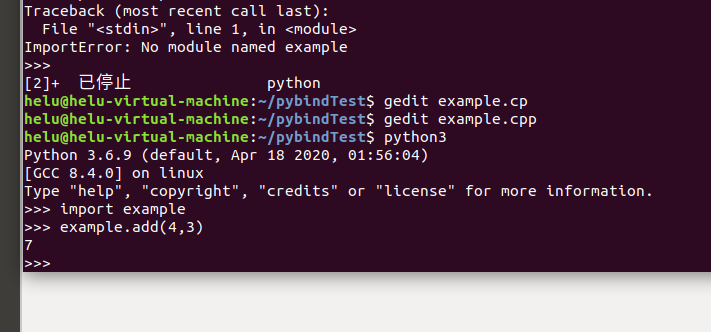
example.cpp
-
o example
`
python3
-
config
--
extension
-
suffix
`

cmake_minimum_required(VERSION
2.
8.
12)
project(example)
add_subdirectory(pybind11)
pybind11_add_module(example example.cpp)

cmake .
make

import example
example.add(
3,
4)
[out]
:
7
project(example)
cmake_minimum_required(VERSION 2.8.12)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_subdirectory(pybind11)
pybind11_add_module(example example.cpp)
target_link_libraries(example PRIVATE ${OpenCV_LIBS})
project(example)
cmake_minimum_required(VERSION
2.
8.
12)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_subdirectory(pybind11)
SET(SOURCES
${CMAKE_CURRENT_SOURCE_DIR}
/example.cpp
)
pybind11_add_module(example ${SOURCES})
target_link_libraries(example
PRIVATE
${OpenCV_LIBS})
简单分析一下这段Cmake,除了必须的项目名称等以外,就是简单地去寻找OpenCV等的地址,而后将lib输入进去。
pybind11_add_module相当于建立项目,使用Set方法方便批量处理。
其中注意两点:
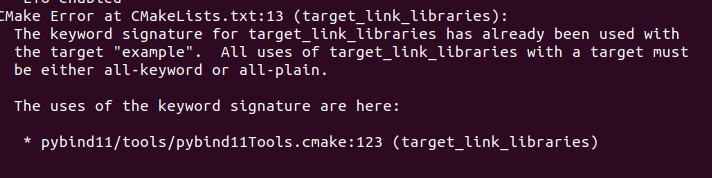
1、target_link_libraries(example PRIVATE ${OpenCV_LIBS}) 放最后
2、xample PRIVATE 不可缺少,否则报这个错
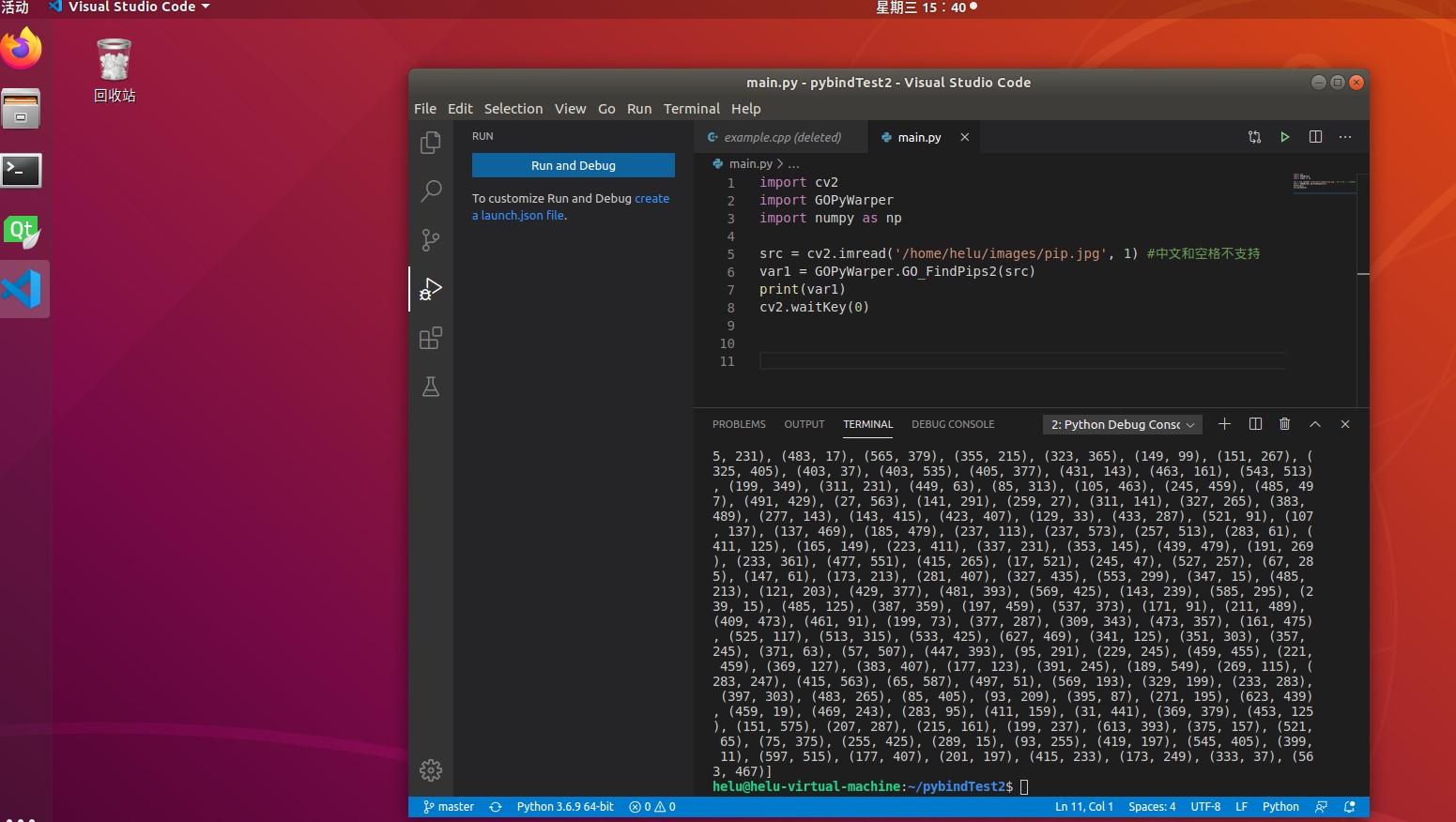
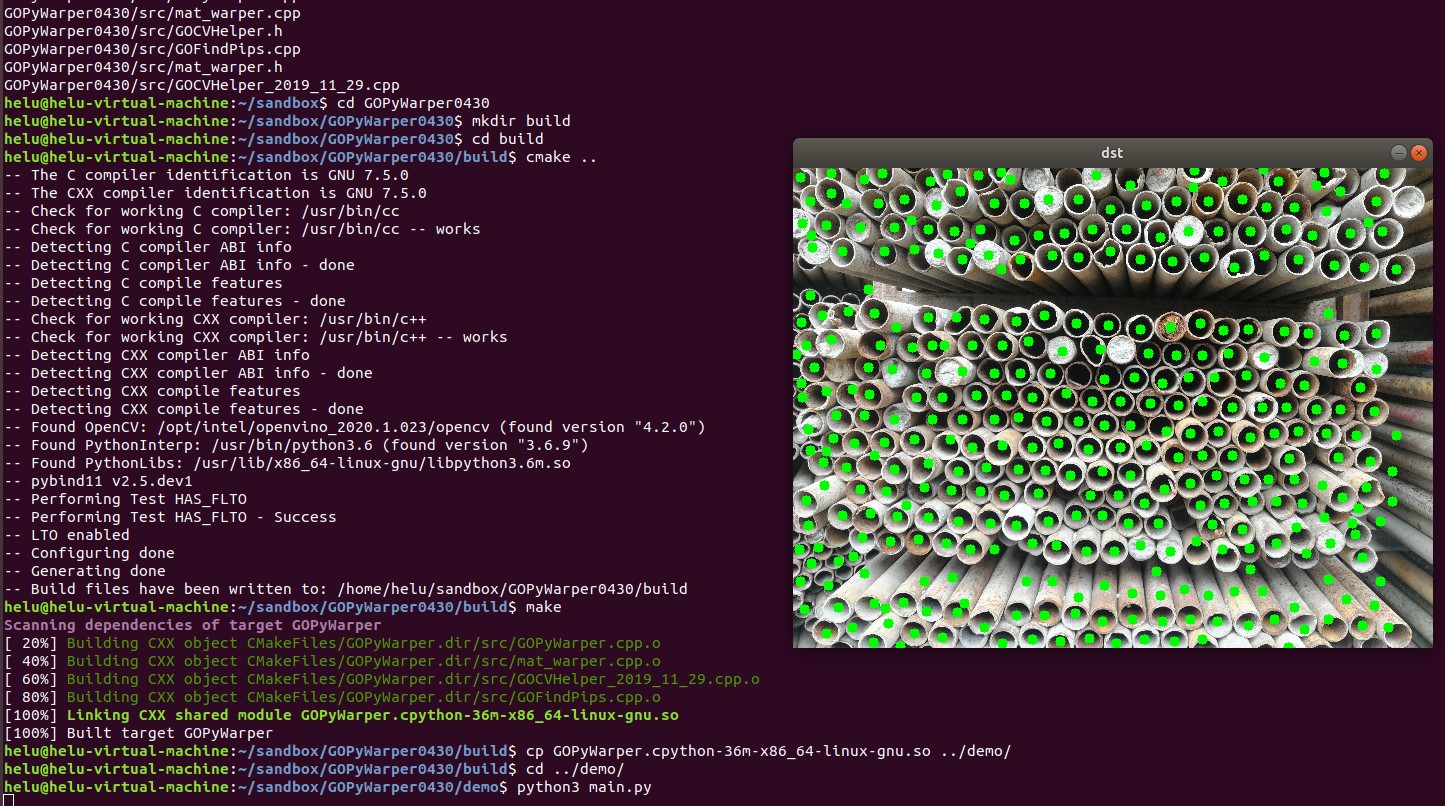
 成功调用结果,
注意绝对地址。
成功调用结果,
注意绝对地址。


project(example)
cmake_minimum_required(VERSION
2.
8.
12)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
add_subdirectory(pybind11)
SET(SOURCES
${CMAKE_CURRENT_SOURCE_DIR}
/example.cpp
${CMAKE_CURRENT_SOURCE_DIR}
/mat_warper.h
${CMAKE_CURRENT_SOURCE_DIR}
/mat_warper.cpp
)
pybind11_add_module(example ${SOURCES})
target_link_libraries(example PRIVATE ${OpenCV_LIBS})

tar
-xvf GOPyWarper0429.tar
mkdir build
cd build
cmake ..
make
cp GOPyWarper.cpython
-
36m
-x86_64
-linux
-gnu.so ../demo
cd ../demo
python3 main.py
import cv2
import GOPyWarper
import numpy as np
#获取图片,彩色3通道。
#中文和空格不支持
src
= cv2.imread(
'pip.jpg',
1)
#GO_FindPips
#输入mat,输出为list(point1,point2,……),其中point代表一个找到的圆心。.
varCircles
= GOPyWarper.GO_FindPips(src)
#print(varCircles)
#GO_Resize
#输入mat,输出为规则化后文件大小
varResize
= GOPyWarper.GO_Resize(src)
#绘图
dst
=cv2.resize(src,((
int)(varResize[
0]),(
int)(varResize[
1])),interpolation
=cv2.INTER_CUBIC)
for i
in varCircles[
:]
:
cv2.circle(dst,(i[
0],i[
1]),
5,(
0,
255,
0),
-
1)
cv2.imshow(
"dst",dst)
cv2.waitKey(
0)
helu@helu
-virtual
-machine
:
~
/sandbox$ tar
-cvf GOPyWarper0430.tar GOPyWarper0430
......
helu@helu
-virtual
-machine
:
~
/sandbox$ cd GOPyWarper0430
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430$ mkdir build
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430$ cd build
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430
/build$ cmake ..
......
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430
/build$ make
Scanning dependencies of target GOPyWarper
[
20
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOPyWarper.cpp.o
[
40
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/mat_warper.cpp.o
[
60
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOCVHelper_2019_11_29.cpp.o
[
80
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOFindPips.cpp.o
[
100
%] Linking CXX shared module GOPyWarper.cpython
-
36m
-x86_64
-linux
-gnu.so
[
100
%] Built target GOPyWarper
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430
/build$
cp GOPyWarper.cpython
-
36m
-x86_64
-linux
-gnu.so ..
/demo
/
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430
/build$ cd ..
/demo
/
helu@helu
-virtual
-machine
:
~
/sandbox
/GOPyWarper0430
/demo$ python3 main.py

helu@helu
-virtual
-machine
:
~
/workstation
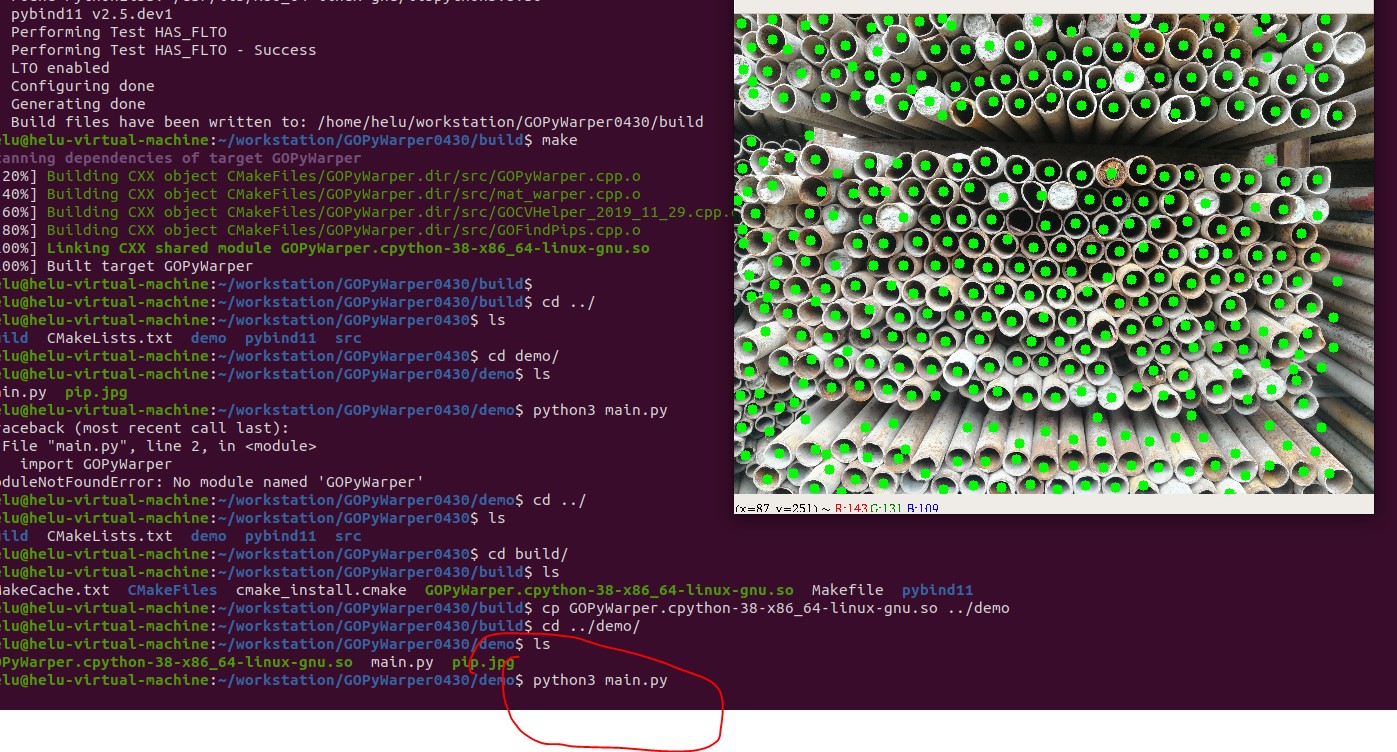
/GOPyWarper0430$ cd build
/
helu@helu
-virtual
-machine
:
~
/workstation
/GOPyWarper0430
/build$ cmake ..
-- Found OpenCV
:
/usr
/local (found version
"4.3.0")
-- Found PythonInterp
:
/usr
/bin
/python3.
8 (found version
"3.8.2")
-- Found PythonLibs
:
/usr
/lib
/x86_64
-linux
-gnu
/libpython3.
8.so
-- pybind11 v2.
5.dev1
-- Performing Test HAS_FLTO
-- Performing Test HAS_FLTO
- Success
-- LTO enabled
-- Configuring
done
-- Generating
done
-- Build files have been written to
:
/home
/helu
/workstation
/GOPyWarper0430
/build
helu@helu
-virtual
-machine
:
~
/workstation
/GOPyWarper0430
/build$ make
Scanning dependencies of target GOPyWarper
[
20
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOPyWarper.cpp.o
[
40
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/mat_warper.cpp.o
[
60
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOCVHelper_2019_11_29.cpp.o
[
80
%] Building CXX object CMakeFiles
/GOPyWarper.dir
/src
/GOFindPips.cpp.o
[
100
%] Linking CXX shared module GOPyWarper.cpython
-
38
-x86_64
-linux
-gnu.so
[
100
%] Built target GOPyWarper
helu@helu
-virtual
-machine
:
~
/workstation
/GOPyWarper0430
/build$
| GaussBlur | windows实体机 c++原生 | ubuntu虚拟机 opencv_python | ubuntu虚拟机 pbind11 |
| 1次 | 32 | 34 | 40 |
| 重复100次 | 2819 | 3740 | 3891 |
int main() {
string path
=
"e:/template/lena.jpg";
cv
:
:Mat src
= cv
:
:imread(path);
Mat dst;
//开始计时
double dstart
= (
double)cv
:
:getTickCount();
for (
int i
=
0;i
<
=
100;i
++)
{
cv
:
:GaussianBlur(src, dst, cv
:
:Size(
101,
101),
1.
0,
1.
0);
printf(
"%d times %f ms\n", i,
1000
* (getTickCount()
- dstart)
/ getTickFrequency());
}
cv
:
:waitKey(
0);
return
0;
}
import cv2
import GOPyWarper
import numpy as np
src
= cv2.imread(
'/home/helu/images/lena.jpg',
1)
dstart
= cv2.getTickCount()
for i
in
range(
100)
:
blur
= cv2.GaussianBlur(src,(
101,
101),
1.
0,
None,
1.
0,borderType
=
4)
print(
1000
* ( cv2.getTickCount()
- dstart)
/cv2.getTickFrequency())
import cv2
import GOPyWarper
import numpy as np
#获取图片,彩色3通道。
#中文和空格不支持
src
= cv2.imread(
'/home/helu/images/lena.jpg',
1)
dstart
= cv2.getTickCount()
for i
in
range(
100)
:
blur
= GOPyWarper.test_gaussblur(src)
print(
1000
* ( cv2.getTickCount()
- dstart)
/cv2.getTickFrequency())



 浙公网安备 33010602011771号
浙公网安备 33010602011771号