

RS-485+modbus协议:远程消防检测系统
前期准备
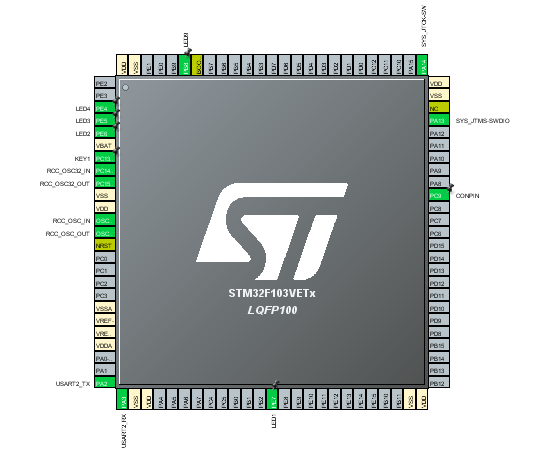
1.cortex-M3主控模块2个
2.火焰传感器1个
实现现象
M3采集端模块上的LED8S闪烁,M3主控模块监测端每两秒查询一次火情,LED9亮0.5秒,灭1.5秒,当有
火情产生时监测端的LED1-LED4开始流水灯显示,按下监测端的按键1(KEY1)流水灯关闭。
一、STM32CubeMX配置
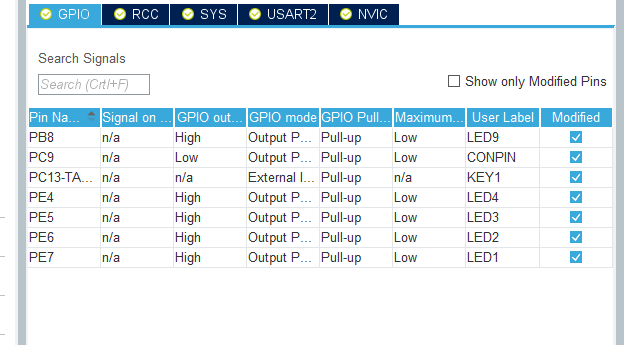
1.1 LED1-LED4(PE7,PE6,PE5,PE4)、KEY1(PC13)、LED9(PB8)所在GPIO的配置
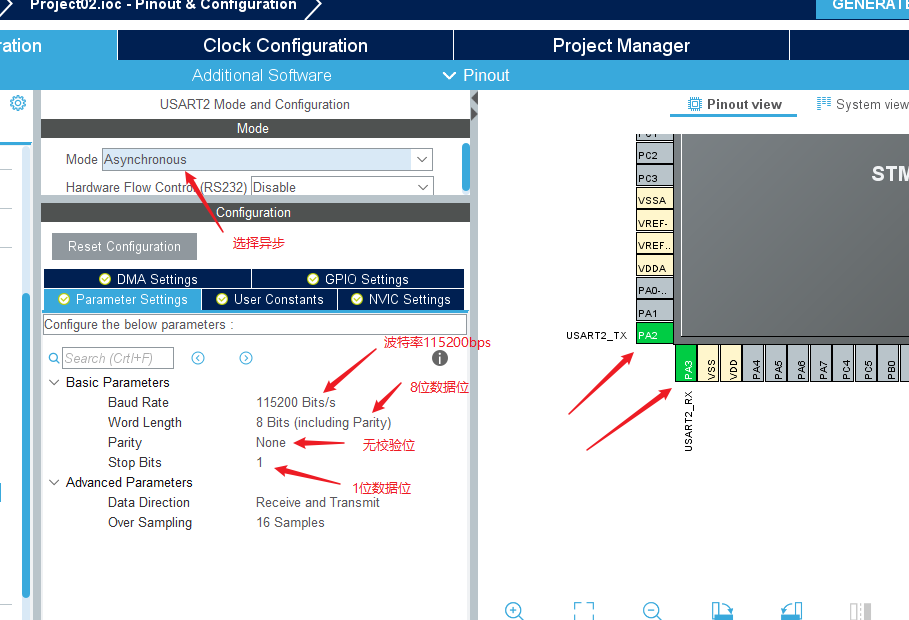
1.2 串口USART2的设置为波特率115200bps,8位数据位,1位停止位,无校验位
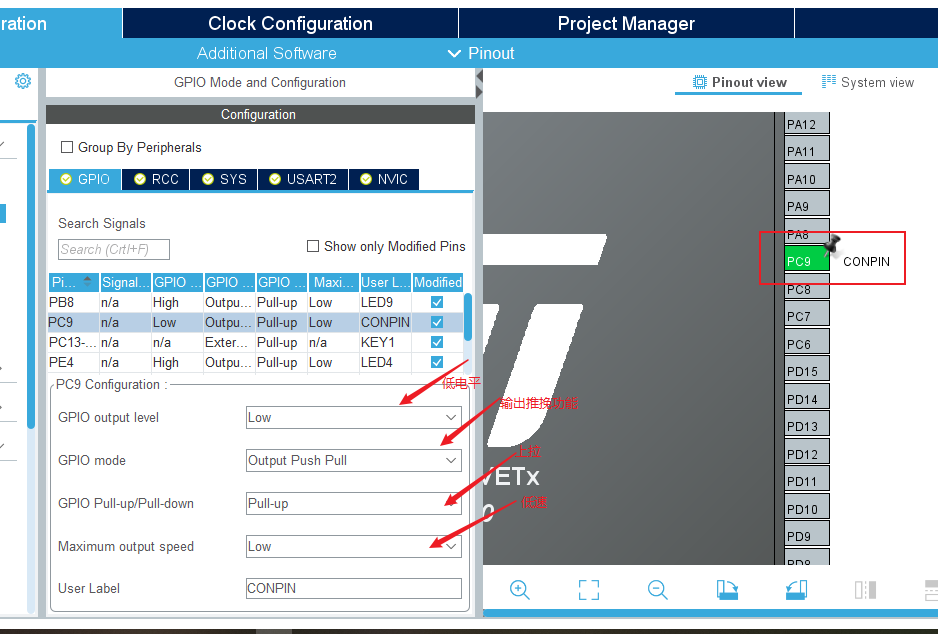
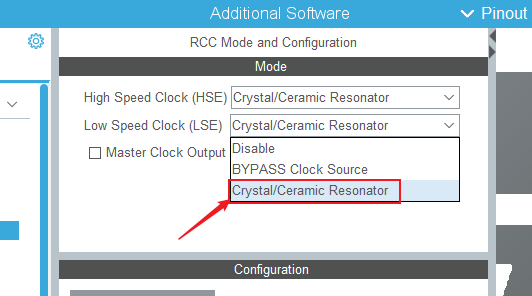
1.3 PC9 引脚控制 485 通信芯片收发转换(低电平接收,高电平发送)
1.4 时钟树配置,主频72M

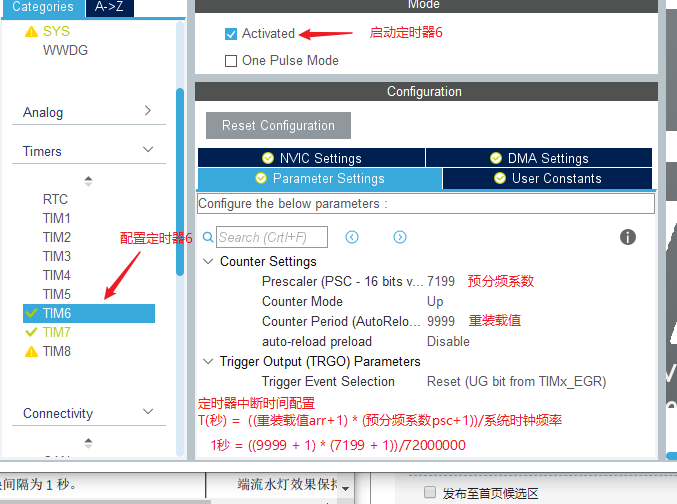
1.5 配置定时器的工作参数

生成代码
三、补充代码
3.1定义变量
/* USER CODE BEGIN PV */ // LED灯的状态 static uint16_t ledState = 0x0000; // 着火标志,默认为0,不着火 static uint8_t flag_fire = 0; // 接受的数据存放 uint8_t rxBuf[20] = {0}; /* USER CODE END PV */
3.2监测端发送命令
/* USER CODE BEGIN 0 */ void SendCmd(void) { // 监测端查询请求的数据格式 uint8_t cmd[8] = {0}; cmd[0] = 0x01; cmd[1] = 0x04; cmd[2] = 0x00; cmd[3] = 0x02; cmd[4] = 0x00; cmd[5] = 0x01; cmd[6] = 0x90; cmd[7] = 0x0A; // 设置PC9引脚为低电平,接受数据
HAL_GPIO_WritePin(CONPIN_GPIO_Port,CONPIN_Pin,GPIO_PIN_SET); // 发送数据 HAL_UART_Transmit(串口,内容,数据大小,延时时间) HAL_UART_Transmit(&huart2,cmd,8,0xffff); // 设置PC9引脚为低电平,接受数据 HAL_GPIO_WritePin(CONPIN_GPIO_Port,CONPIN_Pin,GPIO_PIN_RESET); // 接受数据HAL_UART_Receive_IT(串口,数据,大小) HAL_UART_Receive_IT(&huart2,rxBuf,7); } /* USER CODE END 0 */
3.3启动定时器的中断
/* USER CODE BEGIN 2 */ if(HAL_TIM_Base_Start_IT(&htim6) != HAL_OK) { Error_Handler(); } if(HAL_TIM_Base_Start_IT(&htim7) != HAL_OK) { Error_Handler(); } /* USER CODE END 2 */
3.4实现监测端LED9 每隔 2 秒闪烁一 次(亮 0.5 秒,灭 1.5 秒)
/* USER CODE BEGIN WHILE */ while (1) { HAL_GPIO_WritePin(LED9_GPIO_Port,LED9_Pin,GPIO_PIN_RESET); HAL_Delay(500); HAL_GPIO_WritePin(LED9_GPIO_Port,LED9_Pin,GPIO_PIN_SET); HAL_Delay(1500); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ }
3.5按键中断
/* USER CODE BEGIN 4 */
// 实现按键中的回调函数 void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { // 判断按键按下 if(GPIO_Pin & GPIO_PIN_13) { // 判断火情 if(flag_fire == 1) { // 存在火情,将标志位置0 flag_fire = 0; // LED灯置0 ledState = 0; // 所有引脚置于低电平 HAL_GPIO_WritePin(GPIOE,0xffff,GPIO_PIN_SET); } } }
3.6定时器
// 定时器回调函数 void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { // 定时器6产生 if(htim->Instance == TIM6) { // 发生火情 if(flag_fire == 1) { // ledState=0x0000 // 0x0000H=0000 0000B // 0000 0000B>>1=0000 0000B ledState = ledState>>1; // 0x0080H=1000 0000B // 1000 0000B | 0000 0000B->1000 0000B
// LED1点亮
ledState |= 0x0080 // 0x00f8H=1111 1000B if(ledState == 0x00f8) ledState = 0; HAL_GPIO_WritePin(GPIOE,0xffff,GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOE,ledState,GPIO_PIN_RESET); } }
//定时器7,每2秒发送一次命令 if(htim->Instance == TIM7) { SendCmd(); } }
3.7串口接受函数
485通信协议,比如
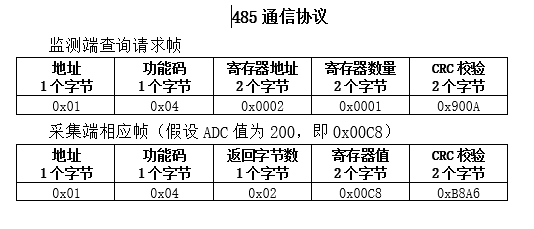
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART2) { // 比对地址码和功能码 if((rxBuf[0] == 0x01) && (rxBuf[1] == 0x04)) { // 定义无符号整型变量temp uint16_t temp = 0; // rxBuf[3]为寄存器的值 // 例如:rxBuf[3]=0x00c8H=1100 1000B // 1100 1000B<<8 ->0000 0000B temp = ((uint16_t)rxBuf[3])<<8; // 0000 0000B | 1000 1011 1010 0110=0000 0000 0000 0000 temp = temp | rxBuf[4]; // 当temp>100时发出报警(flag_fire = 1) if(temp > 100) { flag_fire = 1; } } } } /* USER CODE END 4 */

