
各种特殊矩阵总结
一般在实际运用中,矩阵本身或者都需要化成特殊的形式。列出一些常用的矩阵形式。
reference: en.wikipedia.org
1. Toeplitz matrix,形如
2. Hankel matix,形如

刚好和就是toeplitz的transpose
3. Degree matrix,这个和拓扑学有关了,此矩阵只有main diagonal上有非零值,代表的是对应edge(node)所连接的vetices的数量(如果自循环则算两个)
 ,
, 
对该图形而言,这个E对应的位置就应该填上n。每个E都算完后,其余位置均为0。
4. Adjacency matrix,也和拓扑学有关,为仅有1或者0的矩阵。
如果两个edge之间有vertex相连,则对应位置填1。因为这个性质,此矩阵为symmetric的,main diagonal上的1表示自循环。
5. Laplacian matix。由上面两位计算得到
L=D-A
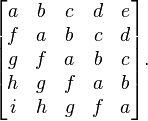
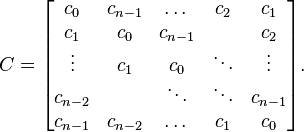
6. Circulant matrix, T的变种,如下
7. Symplectic matrix
指满足这个条件的M(2n*2n)矩阵:
其中,另一个矩阵必须是nonsingular, skew-symmetric matrix.,例如选 
是一个block matrix,I是单位矩阵(identity matix)。
8. Vandermonde matrix,形如

9. Hessenberg matrix
Hessenberg matrix is a special kind of square matrix, one that is "almost" triangular. To be exact, an upper Hessenberg matrix has zero entries below the first subdiagonal, and a lower Hessenberg matrix has zero entries above the first superdiagonal
例如:upper Hessenberg matrix

10. Hessian matrix
对于实数函数  求二阶偏导(second-order partial derivatives),如下
求二阶偏导(second-order partial derivatives),如下
![H(f) = \begin{bmatrix}
\dfrac{\partial^2 f}{\partial x_1^2} & \dfrac{\partial^2 f}{\partial x_1\,\partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_1\,\partial x_n} \\[2.2ex]
\dfrac{\partial^2 f}{\partial x_2\,\partial x_1} & \dfrac{\partial^2 f}{\partial x_2^2} & \cdots & \dfrac{\partial^2 f}{\partial x_2\,\partial x_n} \\[2.2ex]
\vdots & \vdots & \ddots & \vdots \\[2.2ex]
\dfrac{\partial^2 f}{\partial x_n\,\partial x_1} & \dfrac{\partial^2 f}{\partial x_n\,\partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_n^2}
\end{bmatrix}.](http://upload.wikimedia.org/math/f/7/2/f7296865484b39fcbac598a99b7f3dbb.png)

