4.18团队开发报告
1.昨天遇到的问题
昨日发现一个通病问题,就是不管使用视频还是用实时摄像头时,对于画面的帧率有很高的要求,帧率如果超过25帧,画面就会卡,我猜测的问题是因为我人脸识别算法的反应时间太长,算法跟不上每帧画面的速度。
2.今天的目标
今天决定调试视频和摄像头的帧率,保证程序稳定性,同时开始课堂专注度算法的设计。
3.代码
import time
import cv2
from pipeline_module.core.base_module import BaseModule, TASK_DATA_CLOSE, TASK_DATA_OK, TaskData, TASK_DATA_SKIP, \
TASK_DATA_IGNORE
class VideoModule(BaseModule):
def __init__(self, source=0, fps=25, skippable=False):
super(VideoModule, self).__init__(skippable=skippable)
self.task_stage = None
self.source = source
self.cap = None
self.frame = None
self.ret = False
self.skip_timer = 0
self.set_fps(fps)
self.loop = True
def process_data(self, data):
if not self.ret:
if self.loop:
self.open()
return TASK_DATA_IGNORE
else:
return TASK_DATA_CLOSE
data.source_fps = self.fps
data.frame = self.frame
self.ret, self.frame = self.cap.read()
result = TASK_DATA_OK
if self.skip_timer != 0:
result = TASK_DATA_SKIP
data.skipped = None
skip_gap = int(self.fps * self.balancer.short_stab_interval)
# skip_gap = 1
# print(self.balancer.short_stab_module, self.balancer.short_stab_interval)
if self.skip_timer > skip_gap:
self.skip_timer = 0
else:
self.skip_timer += 1
time.sleep(self.interval)
return result
def product_task_data(self):
return TaskData(self.task_stage)
def set_fps(self, fps):
self.fps = fps
self.interval = 1 / fps
def open(self):
super(VideoModule, self).open()
if self.cap is not None:
self.cap.release()
self.cap = cv2.VideoCapture(self.source)
if self.cap.isOpened():
self.set_fps(self.cap.get(cv2.CAP_PROP_FPS))
self.ret, self.frame = self.cap.read()
print("视频源帧率: ", self.fps)
pass
import cv2
from pipeline_module.core.base_module import BaseModule, TASK_DATA_CLOSE, TASK_DATA_OK, TaskData, TASK_DATA_SKIP, \
TASK_DATA_IGNORE
class VideoModule(BaseModule):
def __init__(self, source=0, fps=25, skippable=False):
super(VideoModule, self).__init__(skippable=skippable)
self.task_stage = None
self.source = source
self.cap = None
self.frame = None
self.ret = False
self.skip_timer = 0
self.set_fps(fps)
self.loop = True
def process_data(self, data):
if not self.ret:
if self.loop:
self.open()
return TASK_DATA_IGNORE
else:
return TASK_DATA_CLOSE
data.source_fps = self.fps
data.frame = self.frame
self.ret, self.frame = self.cap.read()
result = TASK_DATA_OK
if self.skip_timer != 0:
result = TASK_DATA_SKIP
data.skipped = None
skip_gap = int(self.fps * self.balancer.short_stab_interval)
# skip_gap = 1
# print(self.balancer.short_stab_module, self.balancer.short_stab_interval)
if self.skip_timer > skip_gap:
self.skip_timer = 0
else:
self.skip_timer += 1
time.sleep(self.interval)
return result
def product_task_data(self):
return TaskData(self.task_stage)
def set_fps(self, fps):
self.fps = fps
self.interval = 1 / fps
def open(self):
super(VideoModule, self).open()
if self.cap is not None:
self.cap.release()
self.cap = cv2.VideoCapture(self.source)
if self.cap.isOpened():
self.set_fps(self.cap.get(cv2.CAP_PROP_FPS))
self.ret, self.frame = self.cap.read()
print("视频源帧率: ", self.fps)
pass
class DrawModule(BaseModule):
def __init__(self):
super(DrawModule, self).__init__()
self.last_time = time.time()
def process_data(self, data):
current_time = time.time()
fps = 1 / (current_time - self.last_time)
frame = data.frame
pred = data.detections
preds_kps = data.keypoints
preds_scores = data.keypoints_scores
for det in pred:
show_text = "person: %.2f" % det[4]
cv2.rectangle(frame, (det[0], det[1]), (det[2], det[3]), box_color, 2)
cv2.putText(frame, show_text,
(det[0], det[1]),
cv2.FONT_HERSHEY_COMPLEX,
float((det[2] - det[0]) / 200),
box_color)
if preds_kps is not None:
draw_keypoints136(frame, preds_kps, preds_scores)
# 记录fps
cv2.putText(frame, "FPS: %.2f" % fps, (0, 52), cv2.FONT_HERSHEY_COMPLEX, 0.5, (0, 0, 255))
# 显示图像
cv2.imshow("yolov5", frame)
cv2.waitKey(40)
self.last_time = current_time
return TASK_DATA_OK
def open(self):
super(DrawModule, self).open()
pass
def __init__(self):
super(DrawModule, self).__init__()
self.last_time = time.time()
def process_data(self, data):
current_time = time.time()
fps = 1 / (current_time - self.last_time)
frame = data.frame
pred = data.detections
preds_kps = data.keypoints
preds_scores = data.keypoints_scores
for det in pred:
show_text = "person: %.2f" % det[4]
cv2.rectangle(frame, (det[0], det[1]), (det[2], det[3]), box_color, 2)
cv2.putText(frame, show_text,
(det[0], det[1]),
cv2.FONT_HERSHEY_COMPLEX,
float((det[2] - det[0]) / 200),
box_color)
if preds_kps is not None:
draw_keypoints136(frame, preds_kps, preds_scores)
# 记录fps
cv2.putText(frame, "FPS: %.2f" % fps, (0, 52), cv2.FONT_HERSHEY_COMPLEX, 0.5, (0, 0, 255))
# 显示图像
cv2.imshow("yolov5", frame)
cv2.waitKey(40)
self.last_time = current_time
return TASK_DATA_OK
def open(self):
super(DrawModule, self).open()
pass
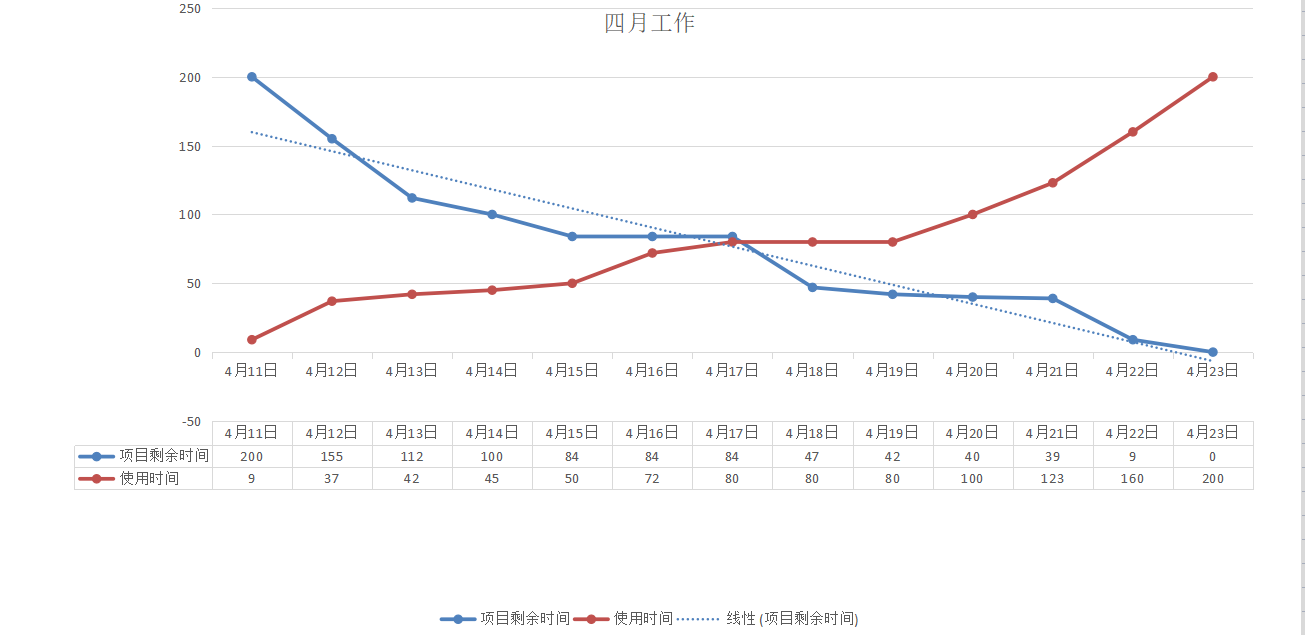
4.燃尽图
5.对应任务索引卡

 浙公网安备 33010602011771号
浙公网安备 33010602011771号