

OpenCV笔记
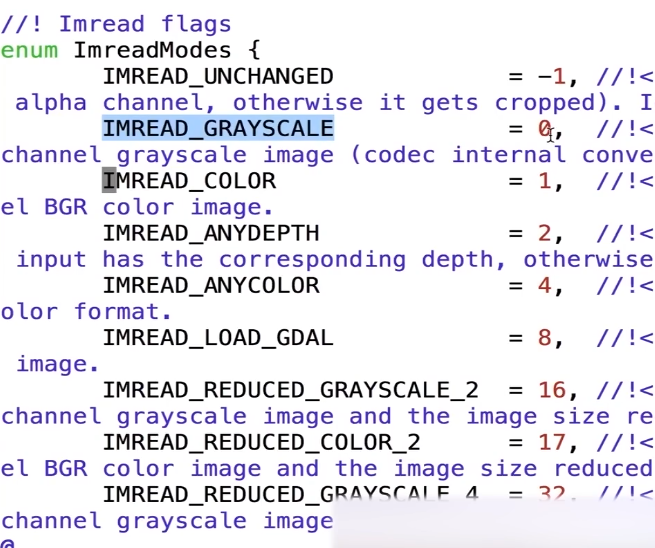
1.imread参数

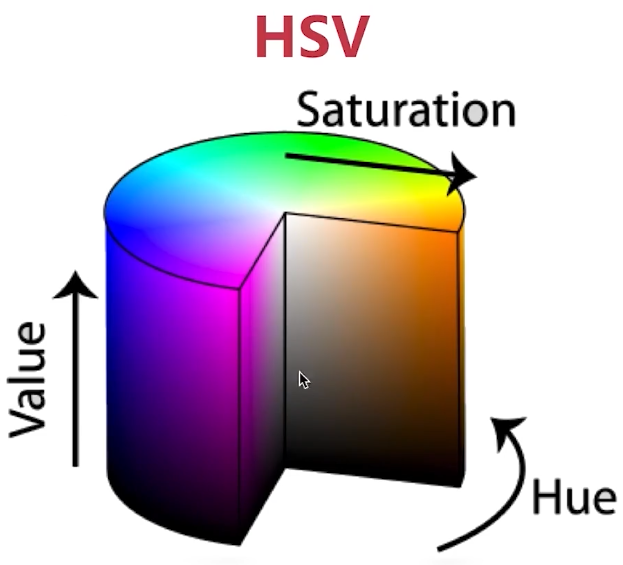
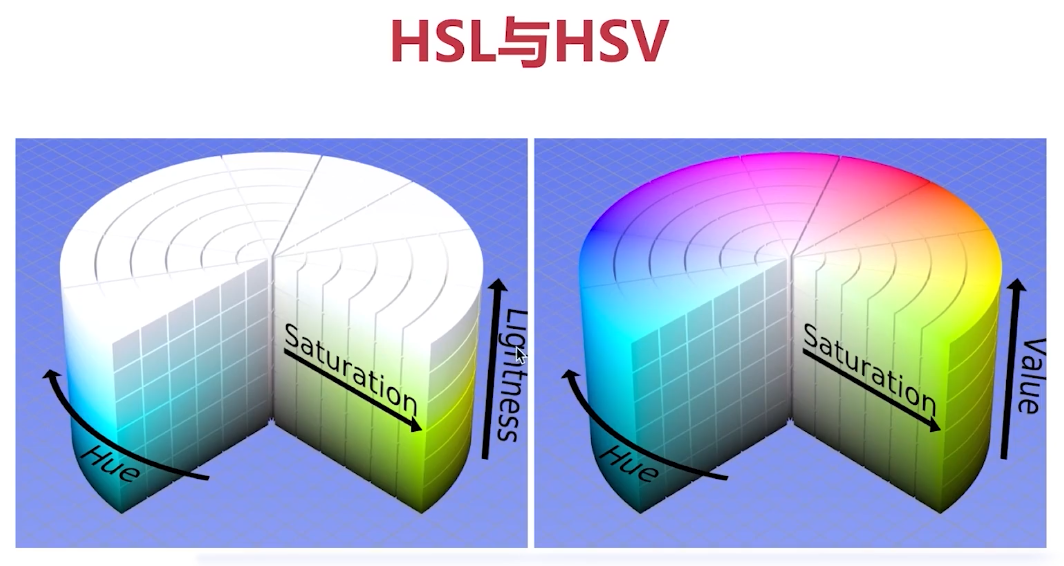
HSV:
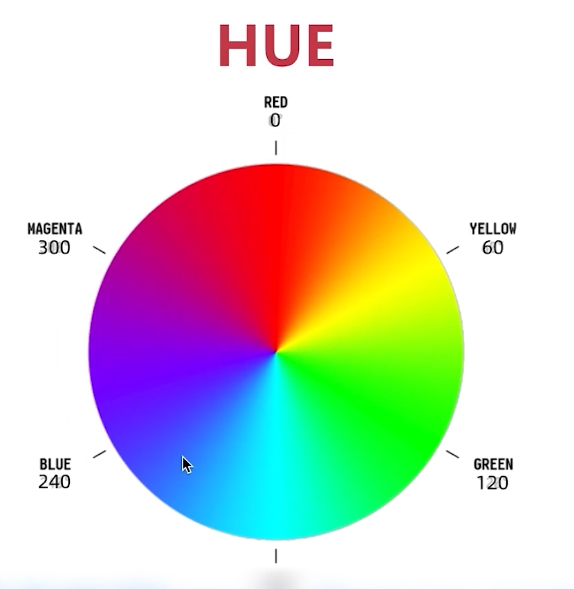
Hue:色相,即色彩,如红色,蓝色
Saturation:饱和度,颜色的纯度
Value:明度
HSL:
Hue:色相,即色彩,如红色,蓝色
Saturation:饱和度,颜色的纯度
Lightness:亮度
OpenCV中使用HSV
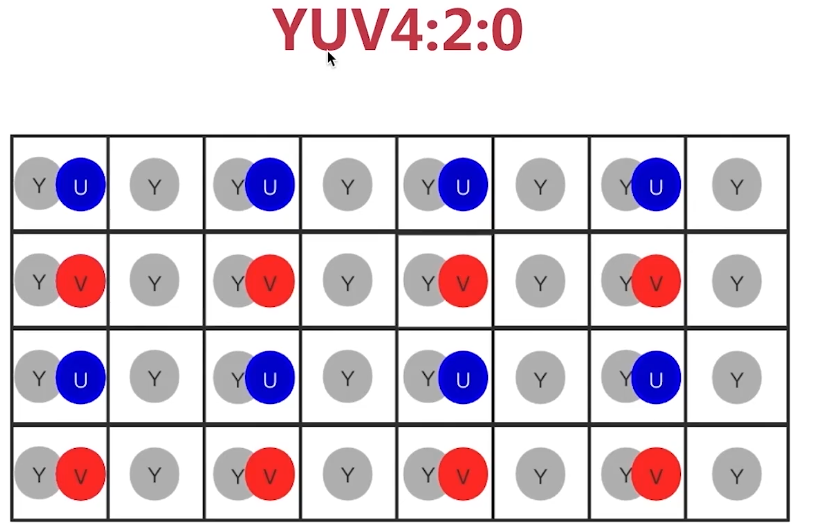
YUV:
主要用于视频中,最早是为了兼容黑白与彩色电视,黑白电视,只播放视频信号中的Y,彩色电视播放YUV
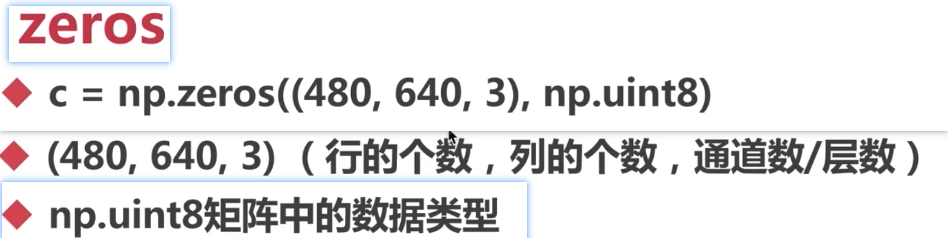
Numpy检索与赋值
[y,x],检索时y在前,x在后
[y,x,channel]
子矩阵: Region of Image (ROI)
Numpy获取子矩阵
[y1:y2,x1:x2]
[:,:]或者[:]为所有矩阵
例:[:,10]为所有x=10的矩阵

通道分离与合并
split(mat)
merge((ch1,ch2,...))
画多边形
polylines(img,点集,是否闭环,颜色,...)
填充多边形
fillPoly(img,点集,颜色)
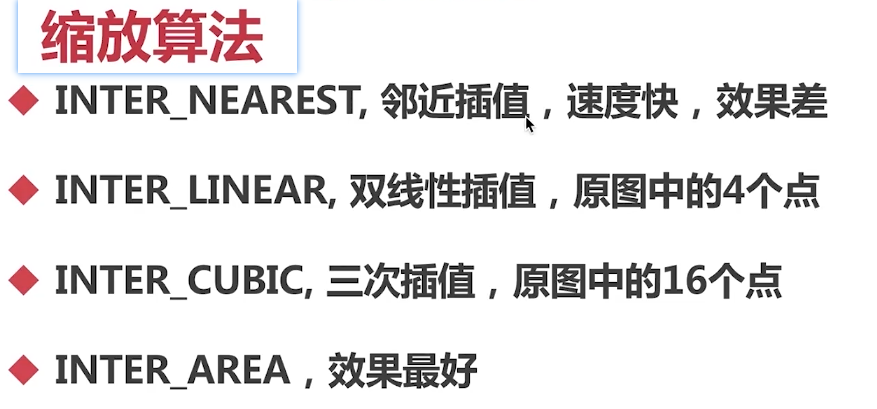
图像缩放算法参数
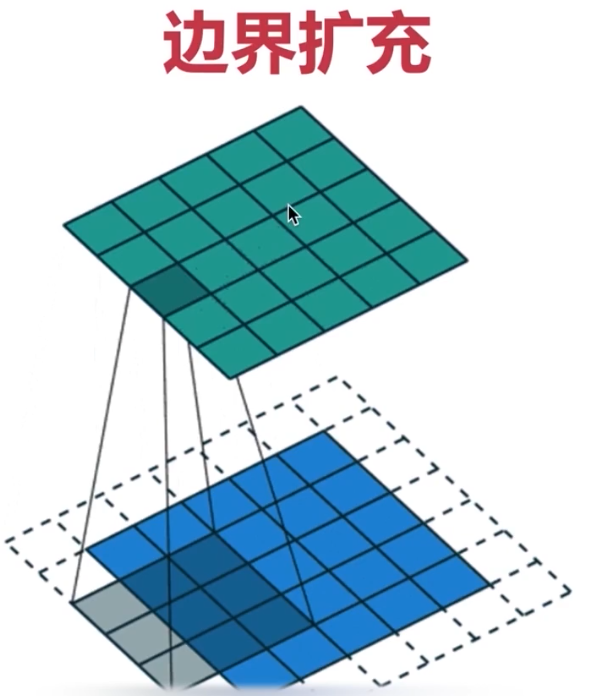
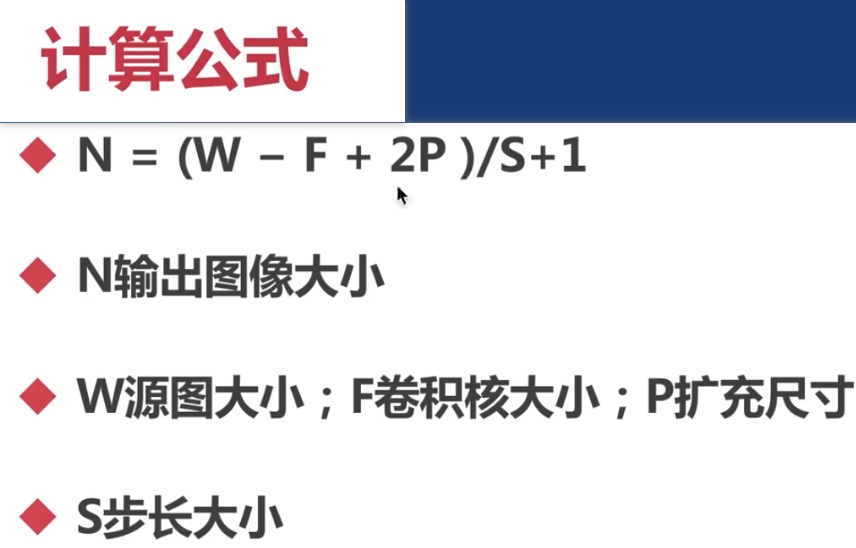
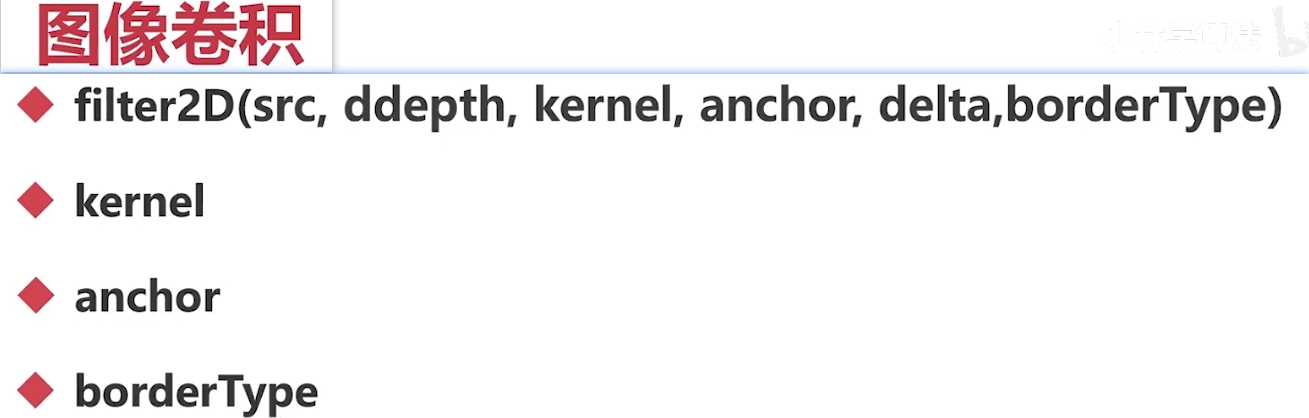
卷积:
中值滤波,主要对胡椒面噪音




低通滤波(均值,中值,方盒,双边,高斯...),主要作用是去噪。
高通滤波(Sobel,Scharr,Laplacian)主要作用是检测边缘。
Sobel(索贝尔),卷积核大小可以改变,卷积核大小设为-1时,就是沙尔滤波,所以在实际使用中索贝尔可以代替沙尔
Scharr(沙尔),卷积核尺寸固定为3*3,相比索贝尔,可以检测出更细的边缘
Laplacian(拉普拉斯)
Sobel和Scharr是分别对X,Y方向检测边缘, 检测后需要进行一次加操作;
Laplacian是同时对X,Y方向检测边缘,但是Laplacian没有噪音处理,所以降噪效果差。
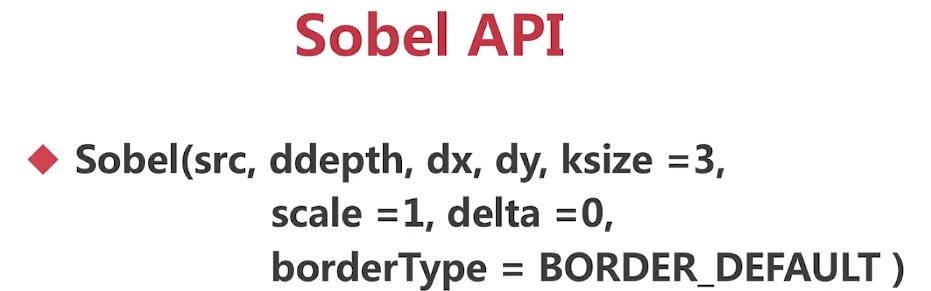
dx=1,求y的边缘
dy=1,求x的边缘

Canny边缘检测:

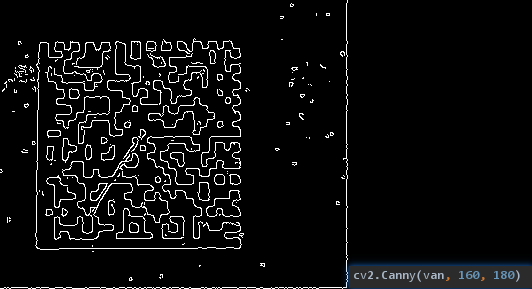
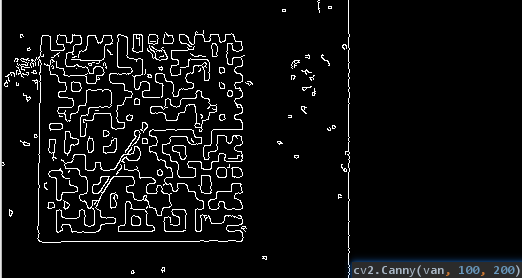
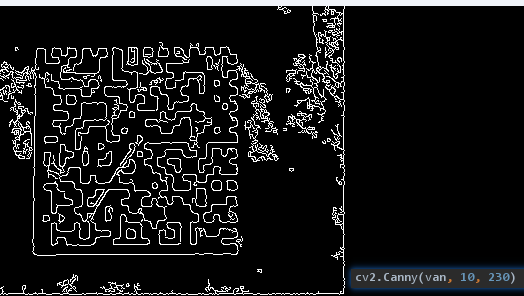
最大值最小值区间小,检测的边缘比较少,区间大,检测的边缘多
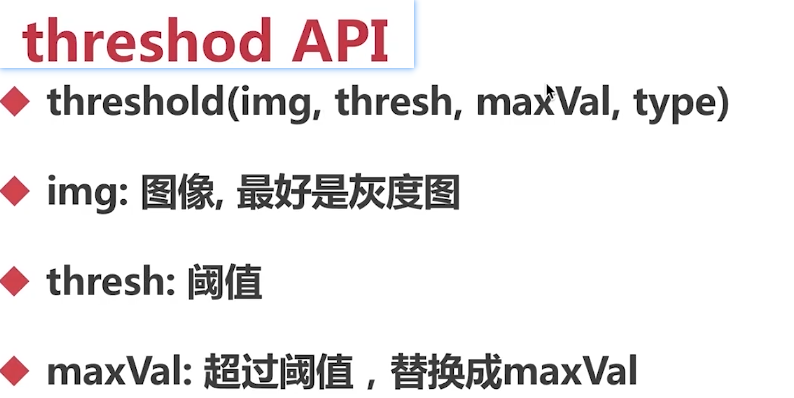
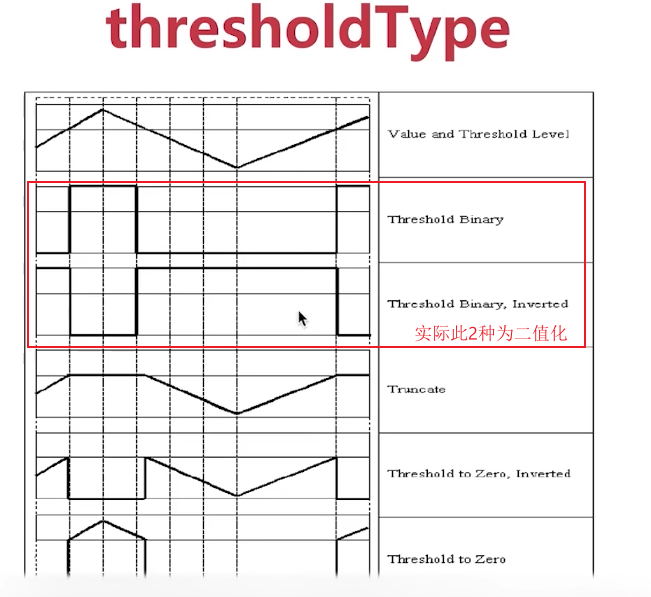
全局二值化
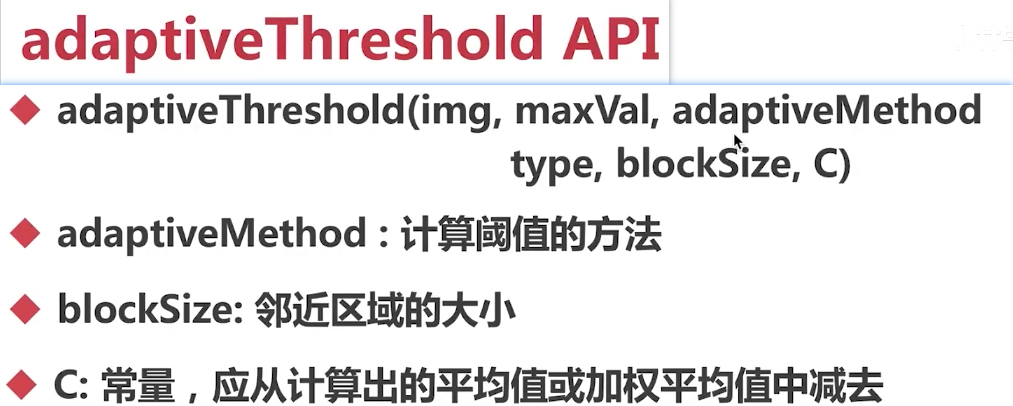
自适应阈值二值化


 浙公网安备 33010602011771号
浙公网安备 33010602011771号