使用Keras进行多GPU训练 multi_gpu_model
使用Keras训练具有多个GPU的深度神经网络(照片来源:Nor-Tech.com)。
摘要
在今天的博客文章中,我们学习了如何使用多个GPU来训练基于Keras的深度神经网络。
使用多个GPU使我们能够获得准线性加速。
为了验证这一点,我们在CIFAR-10数据集上训练了MiniGoogLeNet。
使用单个GPU,我们能够获得63秒的时间段,总训练时间为74分10秒。
然而,通过使用Keras和Python的多GPU训练,我们将训练时间减少到16秒,总训练时间为19m3s。
使用Keras启用多GPU培训就像单个函数调用一样简单 - 我建议您尽可能使用多GPU培训。在未来,我想象 multi_gpu_model 将演变,让我们进一步定制专门其中的GPU应该用于训练,最终实现多系统的训练也是如此。
方法:使用Keras,Python和深度学习进行多GPU培训
当我第一次开始使用Keras时,我爱上了API。它简单而优雅,类似于scikit-learn。然而它非常强大,能够实施和训练最先进的深度神经网络。
然而,我对Keras的最大挫折之一是在多GPU环境中使用它可能有点不重要。
如果您使用Theano,请忘掉它 - 多GPU培训不会发生。
TensorFlow是一种可能性,但它可能需要大量的样板代码和调整才能使您的网络使用多个GPU进行训练。
我更喜欢在执行多GPU培训时使用mxnet后端(甚至是mxnet库直接)到Keras,但这引入了更多的配置来处理。
所有这一切都与改变弗朗索瓦CHOLLET宣布,使用TensorFlow后端多GPU的支持,现在在烤到Keras V2.0.9。大部分功劳归功于@ kuza55和他们的keras-extras回购。
我已经使用并测试了这个多GPU功能已近一年了,我非常高兴看到它作为官方Keras发行版的一部分。
在今天博客文章的剩余部分中,我将演示如何使用Keras,Python和深度学习训练卷积神经网络进行图像分类。
MiniGoogLeNet深度学习架构
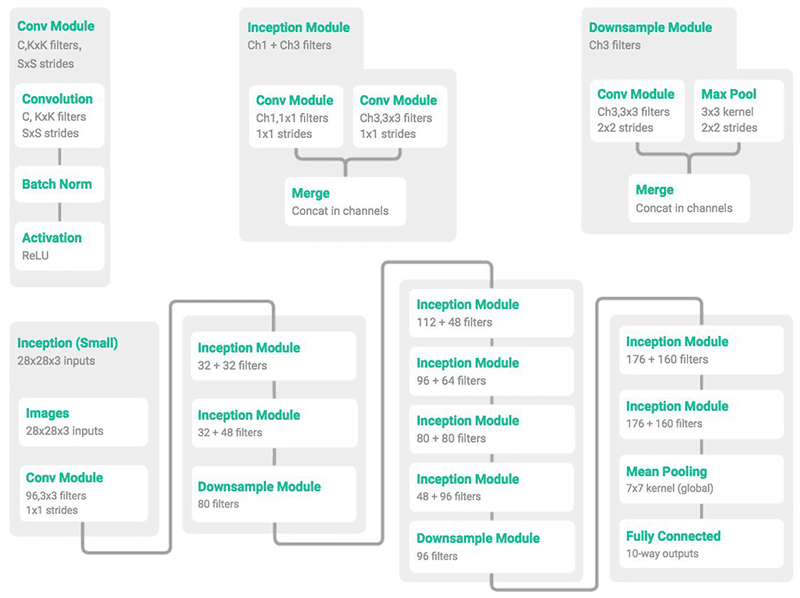
图1: MiniGoogLeNet架构是它的大兄弟GoogLeNet / Inception的一个小版本。图片来自@ ericjang11和@pluskid。
在上面的图1中,我们可以看到单个卷积(左),初始(中)和下采样(右)模块,然后是从这些构建块构建的整体MiniGoogLeNet架构(底部)。我们将在本文后面的多GPU实验中使用MiniGoogLeNet架构。
MiniGoogLenet中的Inception模块是Szegedy等人设计的原始Inception模块的变体。
我首先从@ ericjang11和@pluskid的推文中了解了这个“Miniception”模块,它们可以很好地可视化模块和相关的MiniGoogLeNet架构。
在做了一些研究后,我发现这张图片来自张等人的2017年出版物“ 理解深度学习需要重新思考泛化”。
然后我开始在Keras + Python中实现MiniGoogLeNet架构 - 我甚至将它作为使用Python进行计算机视觉深度学习的一部分。
对MiniGoogLeNet Keras实现的全面审查超出了本博文的范围,因此如果您对网络的工作原理(以及如何编码)感兴趣,请参阅我的书。
否则,您可以使用此博客文章底部的“下载”部分下载源代码。
使用Keras和多个GPU训练深度神经网络
让我们继续使用Keras和多个GPU开始培训深度学习网络。
首先,您需要确保 在虚拟环境中安装和更新Keras 2.0.9(或更高版本)(我们 在本书中使用名为dl4cv的虚拟环境 ):
|
1
2
|
$workon dl4cv
$pip install--upgrade keras
|
从那里,打开一个新文件,将其命名为 train .py ,并插入以下代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
|
# set the matplotlib backend so figures can be saved in the background
# (uncomment the lines below if you are using a headless server)
# import matplotlib
# matplotlib.use("Agg")
# import the necessary packages
frompyimagesearch.minigooglenet importMiniGoogLeNet
fromsklearn.preprocessing importLabelBinarizer
fromkeras.preprocessing.image importImageDataGenerator
fromkeras.callbacks importLearningRateScheduler
fromkeras.utils.training_utils importmulti_gpu_model
fromkeras.optimizers importSGD
fromkeras.datasets importcifar10
importmatplotlib.pyplot asplt
importtensorflow astf
importnumpy asnp
importargparse
|
如果您使用的是无头服务器,则需要通过取消注释行来配置第3行和第4行的matplotlib后端。这样可以将matplotlib图保存到磁盘。如果您没有使用无头服务器(即,您的键盘+鼠标+显示器已插入系统,则可以将线条注释掉)。
从那里我们导入这个脚本所需的包。
第7行从我的pyimagesearch 模块导入MiniGoogLeNet (包含在“下载”部分中提供的下载)。
另一个值得注意的导入是在 第13行,我们导入CIFAR10数据集。这个辅助函数将使我们能够只用一行代码从磁盘加载CIFAR-10数据集。
现在让我们解析命令行参数:
|
19
20
21
22
23
24
25
26
27
28
|
# construct the argument parse and parse the arguments
ap=argparse.ArgumentParser()
ap.add_argument("-o","--output",required=True,
help="path to output plot")
ap.add_argument("-g","--gpus",type=int,default=1,
help="# of GPUs to use for training")
args=vars(ap.parse_args())
# grab the number of GPUs and store it in a conveience variable
G=args["gpus"]
|
我们使用 argparse 解析一个需要和一个可选的参数线20-25:
- - 输出 :训练完成后输出图的路径。
- - gpus :用于培训的GPU数量。
加载命令行参数后, 为方便起见,我们将GPU的数量存储为 G(第28行)。
从那里,我们初始化用于配置我们的训练过程的两个重要变量,然后定义 poly_decay ,一个等同于Caffe的多项式学习速率衰减的学习速率调度函数:
|
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
# definine the total number of epochs to train for along with the
# initial learning rate
NUM_EPOCHS=70
INIT_LR=5e-3
defpoly_decay(epoch):
# initialize the maximum number of epochs, base learning rate,
# and power of the polynomial
maxEpochs=NUM_EPOCHS
baseLR=INIT_LR
power=1.0
# compute the new learning rate based on polynomial decay
alpha=baseLR*(1-(epoch/float(maxEpochs)))**power
# return the new learning rate
returnalpha
|
我们设置 NUM _ EPOCHS = 70 - 这是我们的训练数据将通过网络的次数(时期)(第32行)。
我们还初始化学习率 INIT_LR = 5e - 3 ,这是在之前的试验(第33行)中通过实验发现的值。
从那里,我们定义 poly_decay 函数,它相当于Caffe的多项式学习速率衰减(第35-46行)。本质上,此功能可在训练期间更新学习速率,并在每个时期后有效地减少学习速度。设置 功率= 1.0 会将衰减从多项式更改为线性。
接下来我们将加载我们的训练+测试数据并将图像数据从整数转换为浮点数:
|
48
49
50
51
52
53
|
# load the training and testing data, converting the images from
# integers to floats
print("[INFO] loading CIFAR-10 data...")
((trainX,trainY),(testX,testY))=cifar10.load_data()
trainX=trainX.astype("float")
testX=testX.astype("float")
|
从那里我们对数据应用平均减法:
|
55
56
57
58
|
# apply mean subtraction to the data
mean=np.mean(trainX,axis=0)
trainX-=mean
testX-=mean
|
在 第56行,我们计算所有训练图像的平均值,然后是 第57和58行,其中我们从训练和测试集中的每个图像中减去平均值。
然后,我们执行“one-hot encoding”,这是我在本书中更详细讨论的编码方案:
|
60
61
62
63
|
# convert the labels from integers to vectors
lb=LabelBinarizer()
trainY=lb.fit_transform(trainY)
testY=lb.transform(testY)
|
单热编码将分类标签从单个整数转换为向量,因此我们可以应用分类交叉熵损失函数。我们已经在第61-63行处理了这个问题 。
接下来,我们创建一个数据增强器和一组回调:
|
65
66
67
68
69
70
|
# construct the image generator for data augmentation and construct
# the set of callbacks
aug=ImageDataGenerator(width_shift_range=0.1,
height_shift_range=0.1,horizontal_flip=True,
fill_mode="nearest")
callbacks=[LearningRateScheduler(poly_decay)]
|
在67-69行,我们构建了用于数据增强的图像生成器。
数据增强覆盖在里面详细执业捆绑的深度学习计算机视觉与Python ; 然而,暂时理解这是一种在训练过程中使用的方法,我们通过对它们进行随机变换来随机改变训练图像。
由于这些改变,网络不断地看到增强的示例 - 这使得网络能够更好地概括验证数据,同时可能在训练集上表现更差。在大多数情况下,这些权衡是值得的。
我们在第70行创建了一个回调函数, 它允许我们的学习率在每个时代之后衰减 - 注意我们的函数名称 poly_decay 。
我们接下来检查GPU变量:
|
72
73
74
75
76
|
# check to see if we are compiling using just a single GPU
ifG<=1:
print("[INFO] training with 1 GPU...")
model=MiniGoogLeNet.build(width=32,height=32,depth=3,
classes=10)
|
如果GPU计数小于或等于1,我们 通过使用 初始化 模型。构建 函数(第73-76行),否则我们将在训练期间并行化模型:
|
78
79
80
81
82
83
84
85
86
87
88
89
90
|
# otherwise, we are compiling using multiple GPUs
else:
print("[INFO] training with {} GPUs...".format(G))
# we'll store a copy of the model on *every* GPU and then combine
# the results from the gradient updates on the CPU
withtf.device("/cpu:0"):
# initialize the model
model=MiniGoogLeNet.build(width=32,height=32,depth=3,
classes=10)
# make the model parallel
model=multi_gpu_model(model,gpus=G)
|
在Keras中创建一个多GPU模型需要一些额外的代码,但不多!
首先,您将在第84行注意到我们已指定使用CPU(而不是GPU)作为网络上下文。
为什么我们需要CPU?
好吧,CPU负责处理任何开销(例如在GPU内存上移动和移动训练图像),而GPU本身则负担繁重。
在这种情况下,CPU实例化基本模型。
然后我们可以 在第90行调用 multi_gpu_model。此功能将模型从CPU复制到我们所有的GPU,从而获得单机,多GPU数据并行性。
在训练我们的网络时,图像将被批量分配到每个GPU。CPU将从每个GPU获得梯度,然后执行梯度更新步骤。
然后我们可以编译我们的模型并启动培训过程:
|
92
93
94
95
96
97
98
99
100
101
102
103
104
105
|
# initialize the optimizer and model
print("[INFO] compiling model...")
opt=SGD(lr=INIT_LR,momentum=0.9)
model.compile(loss="categorical_crossentropy",optimizer=opt,
metrics=["accuracy"])
# train the network
print("[INFO] training network...")
H=model.fit_generator(
aug.flow(trainX,trainY,batch_size=64*G),
validation_data=(testX,testY),
steps_per_epoch=len(trainX)//(64*G),
epochs=NUM_EPOCHS,
callbacks=callbacks,verbose=2)
|
在 第94行,我们构建了一个随机梯度下降(SGD)优化器。
随后,我们使用SGD优化器和分类的交叉熵损失函数编译模型。
我们现在准备训练网络了!
为了启动培训过程,我们打电话给 模型。fit_generator 并提供必要的参数。
我们希望每个GPU上的批量大小为64,因此由batch_size = 64 * G 指定 。
我们的培训将持续70个时期(我们之前指定)。
梯度更新的结果将在CPU上组合,然后在整个训练过程中应用于每个GPU。
现在培训和测试已经完成,让我们绘制损失/准确度,以便我们可以看到培训过程:
|
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
|
# grab the history object dictionary
H=H.history
# plot the training loss and accuracy
N=np.arange(0,len(H["loss"]))
plt.style.use("ggplot")
plt.figure()
plt.plot(N,H["loss"],label="train_loss")
plt.plot(N,H["val_loss"],label="test_loss")
plt.plot(N,H["acc"],label="train_acc")
plt.plot(N,H["val_acc"],label="test_acc")
plt.title("MiniGoogLeNet on CIFAR-10")
plt.xlabel("Epoch #")
plt.ylabel("Loss/Accuracy")
plt.legend()
# save the figure
plt.savefig(args["output"])
plt.close()
|
最后一个块仅使用matplotlib绘制训练/测试损失和准确度(第112-121行),然后将数字保存到磁盘(第124行)。
如果您想了解有关培训过程(以及内部工作原理)的更多信息,请参阅使用Python进行计算机视觉深度学习。
Keras多GPU结果
让我们检查一下我们辛勤工作的结果。
首先,使用本文底部的“下载”部分从本课程中获取代码。然后,您就可以按照结果进行操作
让我们在单个GPU上训练以获得基线:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
$python train.py--output single_gpu.png
[INFO]loading CIFAR-10data...
[INFO]training with1GPU...
[INFO]compiling model...
[INFO]training network...
Epoch1/70
-64s-loss:1.4323-acc:0.4787-val_loss:1.1319-val_acc:0.5983
Epoch2/70
-63s-loss:1.0279-acc:0.6361-val_loss:0.9844-val_acc:0.6472
Epoch3/70
-63s-loss:0.8554-acc:0.6997-val_loss:1.5473-val_acc:0.5592
...
Epoch68/70
-63s-loss:0.0343-acc:0.9898-val_loss:0.3637-val_acc:0.9069
Epoch69/70
-63s-loss:0.0348-acc:0.9898-val_loss:0.3593-val_acc:0.9080
Epoch70/70
-63s-loss:0.0340-acc:0.9900-val_loss:0.3583-val_acc:0.9065
Using TensorFlow backend.
real 74m10.603s
user 131m24.035s
sys 11m52.143s
|
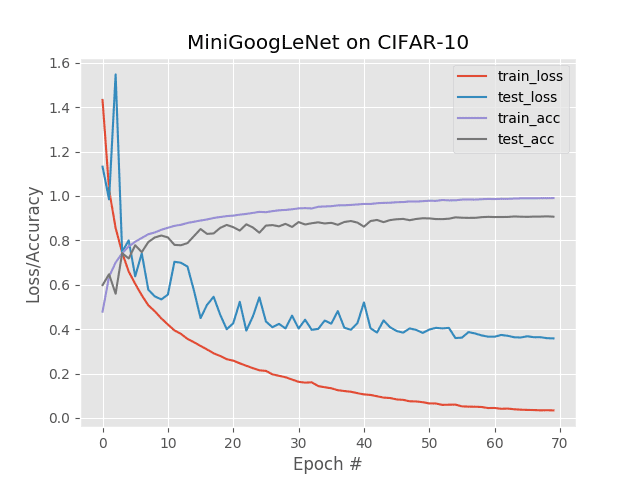
图2:在单个GPU上使用Keras在CIFAR-10上训练和测试MiniGoogLeNet网络架构的实验结果。
对于这个实验,我在我的NVIDIA DevBox上使用单个Titan X GPU进行了训练。每个时期花费约63秒,总训练时间为74分10秒。
然后我执行以下命令来训练 我的所有四个Titan X GPU:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
$python train.py--output multi_gpu.png--gpus4
[INFO]loading CIFAR-10data...
[INFO]training with4GPUs...
[INFO]compiling model...
[INFO]training network...
Epoch1/70
-21s-loss:1.6793-acc:0.3793-val_loss:1.3692-val_acc:0.5026
Epoch2/70
-16s-loss:1.2814-acc:0.5356-val_loss:1.1252-val_acc:0.5998
Epoch3/70
-16s-loss:1.1109-acc:0.6019-val_loss:1.0074-val_acc:0.6465
...
Epoch68/70
-16s-loss:0.1615-acc:0.9469-val_loss:0.3654-val_acc:0.8852
Epoch69/70
-16s-loss:0.1605-acc:0.9466-val_loss:0.3604-val_acc:0.8863
Epoch70/70
-16s-loss:0.1569-acc:0.9487-val_loss:0.3603-val_acc:0.8877
Using TensorFlow backend.
real 19m3.318s
user 104m3.270s
sys 7m48.890s
|
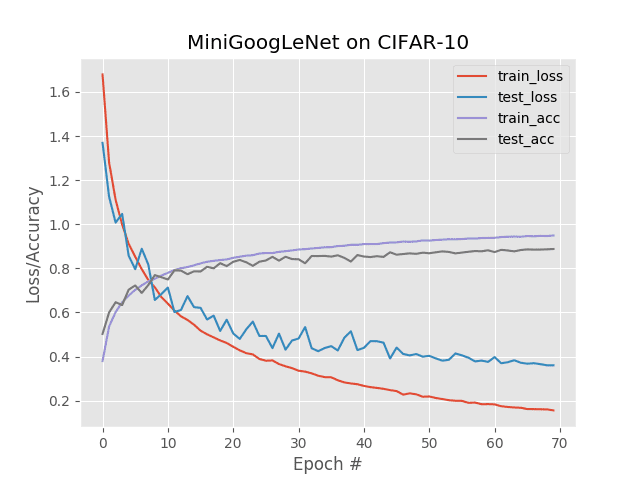
图3:在CIFAR10数据集上使用Keras和MiniGoogLeNet的多GPU培训结果(4个Titan X GPU)。训练结果类似于单GPU实验,而训练时间减少了约75%。
在这里你可以看到训练中的准线性加速:使用四个GPU,我能够将每个时期减少到只有 16秒。整个网络在19分3秒内完成了培训 。
正如您所看到的,不仅可以轻松地训练具有Keras和多个GPU的深度神经网络 ,它也是 高效的!
注意:在这种情况下,单GPU实验获得的精度略高于多GPU实验。在训练任何随机机器学习模型时,会有一些差异。如果你要在数百次运行中平均这些结果,它们将(大致)相同。
欢迎转载,转载请保留页面地址。帮助到你的请点个推荐。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号