win10配置gym、mujoco环境。
本文所用包:链接: https://pan.baidu.com/s/1fkx90AHY6CZ596T72qq05Q 提取码: vvj2
本文使用python3.7,后续的包都是3.7版本的,为防止出错,尽量保持一致。
step1:安装SWIG。
解压压缩包swigwin-4.1.0.zip,文件夹中的swig.exe创建环境变量,创建结束后重启电脑使之生效。
step2:创建虚拟环境并激活。
conda create -n jqn python=3.7 # jqn是虚拟环境名称
conda activate jqn # 激活虚拟环境
step3:安装包ffmpeg,numpy,Cython,imageio
conda install pip # 安装pip之后,可在虚拟环境下使用pip安装包
pip install numpy
pip install ffmpeg
pip install Cython
pip install imageio
step4:安装atari-py,这一步可能因网络的问题失败,要访问github。
pip install --no-index -f https://github.com/Kojoley/atari-py/releases atari_py
如果这样安装失败,cd到文件atari_py-1.2.2-cp37-cp37m-win_amd64.whl所在目录下,使用如下命令进行安装。
pip install atari_py-1.2.2-cp37-cp37m-win_amd64.whl
step5:安装BoX2d,cd到文件Box2D-2.3.2-cp37-cp37m-win_amd64.whl所在目录下。
pip install Box2D-2.3.2-cp37-cp37m-win_ amd64.whl
step6:安装Mujoco。
在C盘用户目录下创建文件夹:.mujoco 然后在该文件夹下创建文件夹:mjpro150,解压压缩包 mjpro150_win64.zip至文件夹mjpro150下,然后将密钥文件mjkey.txt分别放置在mujoco和mjpro150文件夹下。目录结构如下所示。
为mujoco设置环境变量,并在path添加变量。


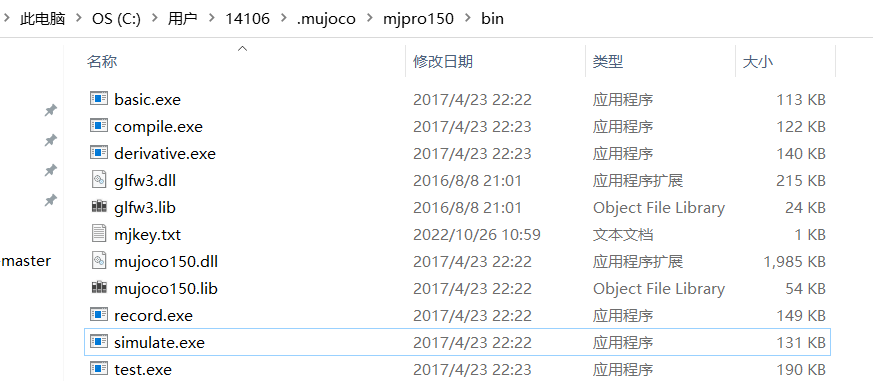
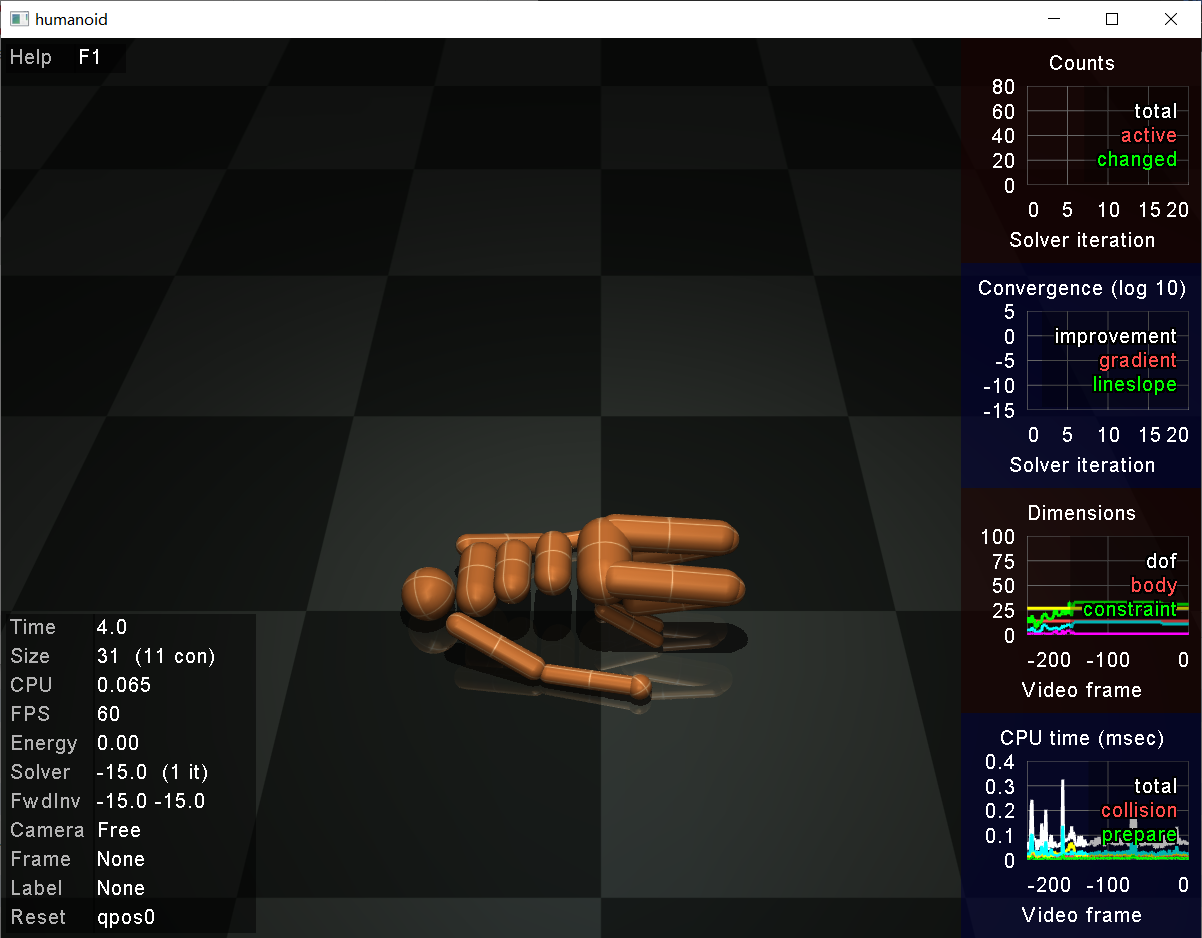
验证mujoco是否安装成功,在mjpro150\bin文件夹下找到simulate.exe双击,并将mjpro150/model下的xml文件拖入到弹出的窗口中,可以观察到结果。
step7:安装mujoco-py。
将压缩包mujoco-py-1.50.1.0.zip解压缩,然后将其中的mujoco_py文件夹放置到conda虚拟环境安装包的位置下。具体是在miniconda/envs/jqn/Lib/site-packages/下。
step8:安装gym。
pip install gym==0.12.0
step9:验证。
在txt当中输入如下代码,并将后缀名改为.py,然后激活虚拟环境使用python进行编译。

import gym
env = gym.make('CartPole-v0')
state = env.reset()
for i in range(100000):
print(i)
for t in range(100):
print(t)
# i = i + 1
env.render()
print(state)
action = env.action_space.sample()
state, reward, done, info = env.step(action)
if done:
print('Finished')
break
env.close()
结果如下: