urdf 学习笔记一
学习写urdf有几个地方需要注意
1. 一定要记住它使用的是右手坐标系。
x正方向朝左, y 正方向向内, z轴正方向朝上
2. 构建树结构, 即写link和joint
3. 每个link的参考坐标系都在它的底部,并与关节的参考坐标系正交,为了添加尺寸,需要指定偏移从一个link到它的关节的子link, 这通过添加origin到每个节点解决。
这么说origin表示的是关节相对于父关节的距离和旋转, xyz和rpy
用ros wiki上的r2d2实例学习
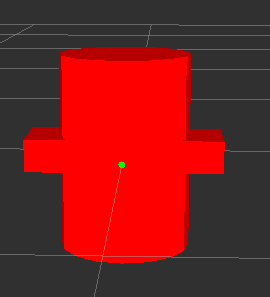
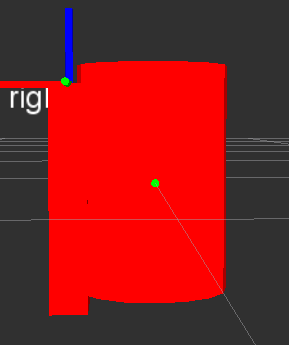
1.初始版本
<?xml version="1.0"?> <robot name="origins"> <link name="base_link"> <visual> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> </visual> </link> <link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> </joint> </robot>
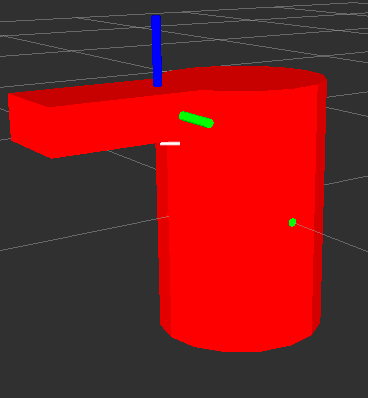
2. 加入关节origin
因为basekink没有改变,所以这里省略baselink...
<link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> <origin xyz="0.22 0 .25"/>(左移和上移, x轴左为正, z为上, y 垂直平面, 右手坐标系) </joint>
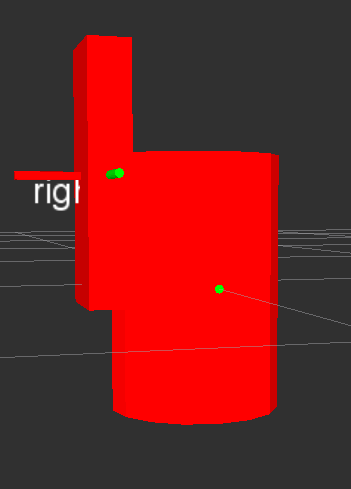
3. 加入link origin y轴 旋转
因为basekink没有改变,所以这里省略baselink...
<link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> <origin rpy="0 1.57075 0"/> (y轴旋转90度) </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> <origin xyz="0.22 0 .25"/> </joint>
4. 加入link origin xyz偏移
因为basekink没有改变,所以这里省略baselink...
<link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> <origin rpy="0 1.57075 0" xyz = “0 0 -0.3 ”/> (y轴旋转90度, 往下0.3) </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> <origin xyz="0.22 0 .25"/> </joint>
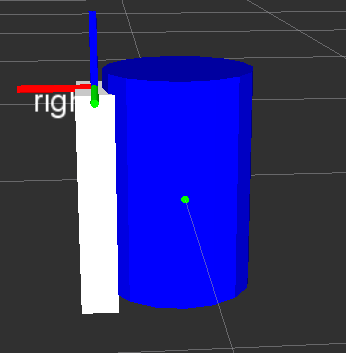
5. 给模型加入材质(穿上一件衣服)
<?xml version="1.0"?> <robot name="origins"> <link name="base_link"> <visual> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> <material name = "blue"> <color rgba = "0 0 .8 1"/> </material> </visual> </link> <link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> <material name = "white"> <color rgba = "1 1 1 1"/> </material> <origin rpy = "0 1.57 0" xyz = "0 0 -0.3"/> </visual> </link>
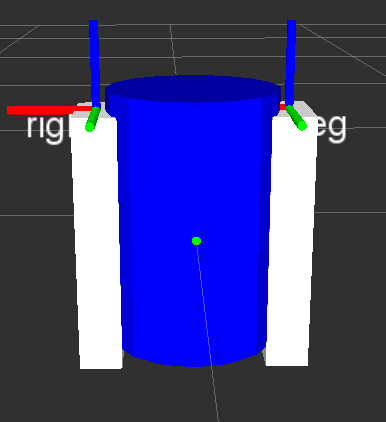
加上左臂
<?xml version="1.0"?> <robot name="origins"> <link name="base_link"> <visual> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> <material name = "blue"> <color rgba = "0 0 .8 1"/> </material> </visual> </link> <link name="right_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> <material name = "white"> <color rgba = "1 1 1 1"/> </material> <origin rpy = "0 1.57 0" xyz = "0 0 -0.3"/> </visual> </link> <joint name="base_to_right_leg" type="fixed"> <parent link="base_link"/> <child link="right_leg"/> <origin xyz="0.22 0 .25"/> </joint> <link name="left_leg"> <visual> <geometry> <box size="0.6 .2 .1"/> </geometry> <material name = "white"> <color rgba = "1 1 1 1"/> </material> <origin rpy = "0 1.57 0" xyz = "0 0 -0.3"/> </visual> </link> <joint name="base_to_left_leg" type="fixed"> <parent link="base_link"/> <child link="left_leg"/> <origin xyz="-0.22 0 .25"/> 仅仅这里不同, 关节右移所以是负 </joint> </robot>
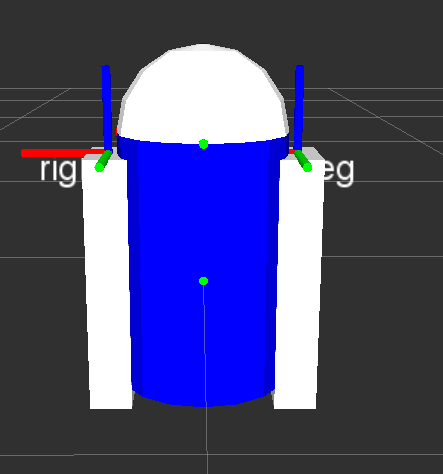
6. 添加头,sphere几何体
注意每定义个link都要为它添加一个关节,否则check_urdf时报错
Error: Failed to find root link: Two root links found: [base_link] and [head]
没有给头link添加关节导致的错误。
<link name = "head"> <visual> <geometry> <sphere radius = "0.2"/> </geometry> <material name = "white"> <color rgba = "1 1 1 1"/> </material> </visual> </link> <joint name = "head_swivel" type = "fixed"> <parent link = "base_link"/> <child link = "head"/> <origin xyz = "0 0 0.3"/> </joint>
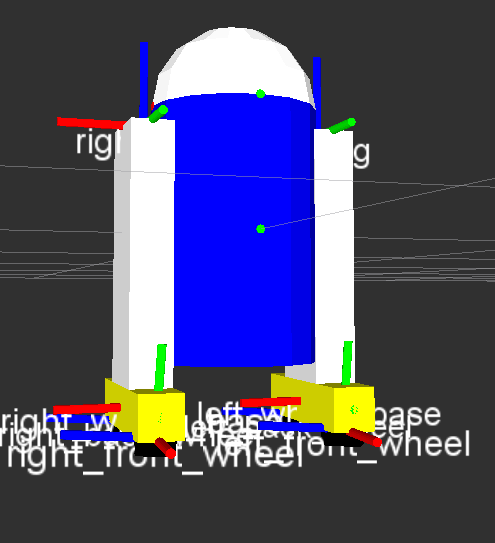
8. 添加车轮和车轮底座
<link name = "right_wheel_base"> //右车轮底座 <visual> <geometry> <box size = "0.1 .4 .1"/> </geometry> <material name = "yellow"> <color rgba = "1 1 0 1"/> </material> </visual> </link> <joint name = "right_wheel_base_joint" type = "fixed"> <parent link = "right_leg"/> <child link = "right_wheel_base"/> <origin xyz = "0 0 -0.65"/> </joint> <link name = "right_front_wheel"> // 右前轮 <visual> <geometry> <cylinder length = "0.08" radius = "0.04"/> </geometry> <material name = "black"> <color rgba = " 0 0 0 1"/> </material> </visual> </link> <joint name = "right_front_wheel_joint" type = "fixed"> <parent link = "right_wheel_base"/> <child link = "right_front_wheel"/> <origin xyz = "0 .14 -.05" rpy = "1.5 0 1.5"/> // 旋转了车轮 </joint> <link name = "right_back_wheel"> // 右后轮 <visual> <geometry> <cylinder length = "0.08" radius = "0.04"/> </geometry> <material name = "black"> <color rgba = " 0 0 0 1"/> </material> </visual> </link> <joint name = "right_back_wheel_joint" type = "fixed"> <parent link = "right_wheel_base"/> <child link = "right_back_wheel"/> <origin xyz = "0 -.14 -.05" rpy = "1.5 0 1.5"/> // y轴为负,往后移 </joint>
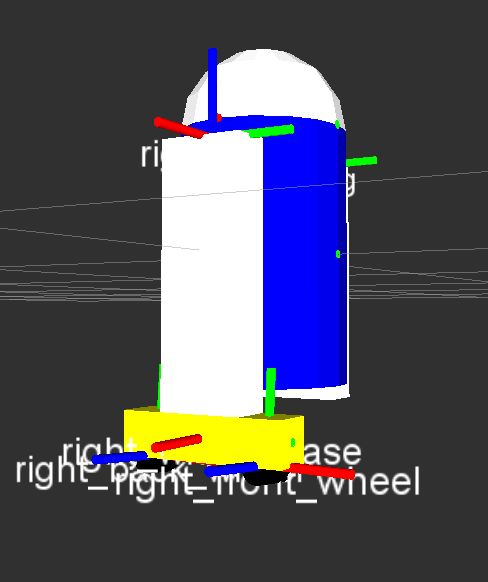
左轮也是一样设置,只需把right 改成left即可, 最后效果如下