IoU及其变种,以及目前最佳Shape-IoU
1)IoU:
优点:能够准确地描述了预测框和GT框之间的匹配程度
缺点:当两个框的交点为0时,无法准确描述预测框和GT框之间的位置关系
2)GIoU:
优点:引入最小检测框来解决,其中C表示GT框和 Anchor 框之间的最小检测框。
3)DIoU:
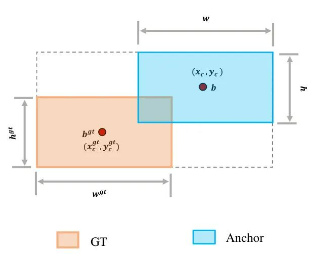
b和bgt分别表示 Anchor 框的中心点和GT框的中心点,p表示欧几里得距离,其中c表示b和bgt之间的最小检测框的斜边长度。
优点:考虑了边界框之间的距离约束,并在IoU的基础上添加了中心点归一化距离损失项,从而使得回归结果更准确。
CIoU:

考虑预测框和GT框的中心点间的归一化距离最小化,增加了一个形状损失项来减少Anchor框和GT框之间的宽高比差异,以更准确地通过角的变化 来判断预测框和GT框的匹配程度
4)EIoU
根据CIoU重新定义了形状损失,并进一步通过直接减小GT框和 Anchor 框之间的宽高比来提高检测精度

wc和hc分别表示最小检测框覆盖GT框和 Anchor 框的宽度和高度
5) SIoU
进一步考虑了边界框之间的角度对边界框回归的影响,旨在通过减小 Anchor 框和GT框之间的角度(水平或垂直方向)来加速收敛过程。

6)针对小目标 点距离Dot Distance和Normalized Wasserstein Distance(NWD)被提出以克服对IoU值的敏感性;
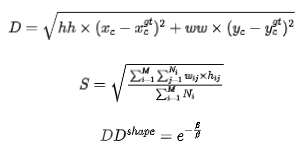
a.Dot Distance

D表示GT框中心点与 Anchor 框中心点之间的欧几里得距离,S表示数据集中目标的平均大小,M表示图像的数量,Ni表示第i张图像中的标注边界框数量,wij和hij分别表示第i张图像中第j个边界框的宽度和高度。
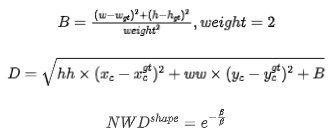
b.Normalized Wasserstein Distance(NWD)

权重w=2,C与数据集相关的常数;
Shape-IoU

scale是缩放因子,与数据集中目标的大小相关,ww和hh分别表示水平方向和垂直方向上的权重系数,其值与GT框的形状有关。

针对小目标的Shape-Dot
将Shape-IoU思想融入点距离,得到Shape-Dot Distance
同样,将Shape-IoU融入归一化NWD中,得到Shape-NWD

 浙公网安备 33010602011771号
浙公网安备 33010602011771号