
目标检测之车辆行人(tensorflow版yolov3-tiny)
背景:
在自动驾驶中,基于摄像头的视觉感知,如同人的眼睛一样重要。而目前主流方案基本都采用深度学习方案(tensorflow等),而非传统图像处理(opencv等)。
接下来我们就以YOLOV3为基本网络模型,Tensorflow为基本框架,搭建一套能够自动识别路面上动态目标,如车辆,行人,骑行人等。
正文:
原生YOLOV3是基于darknet(纯C编写)开发的,这里我们会将YOLOV3架构在Tensorflow平台上(Python,C++跨平台多语言)。
关键点介绍:
一、基本的网络结构图:
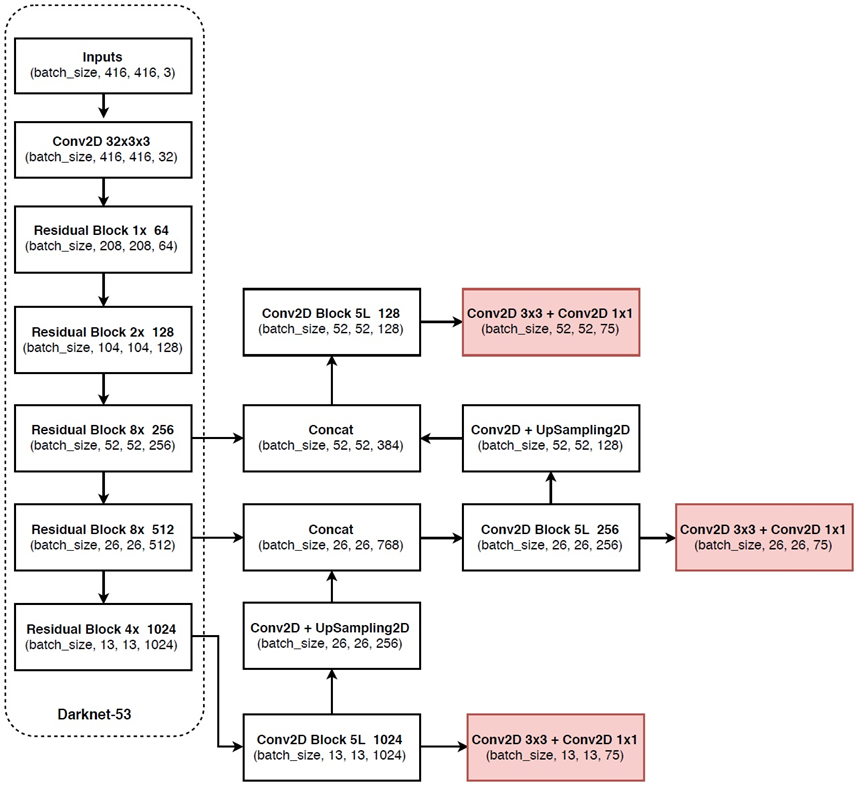
模型流程图如下:

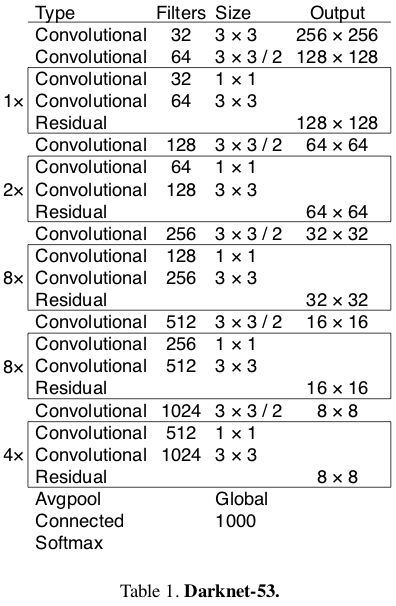
基础主干网Darknet53:
二、代码结构:
tf_yolov3
|-------extract_voc.py #从原始文件中生成训练所需数据格式



import os import argparse import xml.etree.ElementTree as ET # sets=[('2007', 'train'), ('2007', 'val'), ('2007', 'test')] sets=[('2012', 'train'), ('2012', 'val')] classes = ["aeroplane", "bicycle", "bird", "boat", "bottle", "bus", "car", "cat", "chair", "cow", "diningtable", "dog", "horse", "motorbike", "person", "pottedplant", "sheep", "sofa", "train", "tvmonitor"] parser = argparse.ArgumentParser() parser.add_argument("--voc_path", default="/home/yang/test/VOCdevkit/train/") parser.add_argument("--dataset_info_path", default="./") flags = parser.parse_args() def convert_annotation(year, image_id, list_file): xml_path = os.path.join(flags.voc_path, 'VOCdevkit/VOC%s/Annotations/%s.xml'%(year, image_id)) in_file = open(xml_path) tree=ET.parse(in_file) root = tree.getroot() for obj in root.iter('object'): difficult = obj.find('difficult').text cls = obj.find('name').text if cls not in classes or int(difficult)==1: continue cls_id = classes.index(cls) xmlbox = obj.find('bndbox') b = (int(xmlbox.find('xmin').text), int(xmlbox.find('ymin').text), int(xmlbox.find('xmax').text), int(xmlbox.find('ymax').text)) list_file.write(" " + " ".join([str(a) for a in b]) + " " + str(cls_id)) for year, image_set in sets: text_path = os.path.join(flags.voc_path, 'VOCdevkit/VOC%s/ImageSets/Main/%s.txt'%(year, image_set)) if not os.path.exists(text_path): continue image_ids = open(text_path).read().strip().split() list_file_path = os.path.join(flags.dataset_info_path, '%s_%s.txt'%(year, image_set)) list_file = open(list_file_path, 'w') for image_id in image_ids: image_path = os.path.join(flags.voc_path, 'VOCdevkit/VOC%s/JPEGImages/%s.jpg'%(year, image_id)) print("=>", image_path) list_file.write(image_path) convert_annotation(year, image_id, list_file) list_file.write('\n') list_file.close()
|-------make_voc_tfrecord.sh #制作tfrecord格式
python scripts/extract_voc.py --voc_path /home/yang/test/VOC/train/ --dataset_info_path ./ cat ./2007_train.txt ./2007_val.txt > voc_train.txt python scripts/extract_voc.py --voc_path /home/yang/test/VOC/test/ --dataset_info_path ./ cat ./2007_test.txt > voc_test.txt python core/convert_tfrecord.py --dataset_txt ./voc_train.txt --tfrecord_path_prefix /home/yang/test/VOC/train/voc_train python core/convert_tfrecord.py --dataset_txt ./voc_test.txt --tfrecord_path_prefix /home/yang/test/VOC/test/voc_test
|-------convert_tfrecord.py # 转换原始数据成TFReocord格式
import sys import argparse import numpy as np import tensorflow as tf def main(argv): parser = argparse.ArgumentParser() parser.add_argument("--dataset_txt", default='./data/dataset.txt') parser.add_argument("--tfrecord_path_prefix", default='./data/tfrecords/dataset') flags = parser.parse_args() dataset = {} # with open(flags.dataset_txt,'r') as f: for line in f.readlines(): example = line.split(' ') image_path = example[0] boxes_num = len(example[1:]) // 5 boxes = np.zeros([boxes_num, 5], dtype=np.float32) for i in range(boxes_num): boxes[i] = example[1+i*5:6+i*5] dataset[image_path] = boxes image_paths = list(dataset.keys()) images_num = len(image_paths) print(">> Processing %d images" %images_num) tfrecord_file = flags.tfrecord_path_prefix+".tfrecords" with tf.python_io.TFRecordWriter(tfrecord_file) as record_writer: for i in range(images_num): image = tf.gfile.FastGFile(image_paths[i], 'rb').read() boxes = dataset[image_paths[i]] boxes = boxes.tostring() example = tf.train.Example(features = tf.train.Features( feature={ 'image' :tf.train.Feature(bytes_list = tf.train.BytesList(value = [image])), 'boxes' :tf.train.Feature(bytes_list = tf.train.BytesList(value = [boxes])), } )) record_writer.write(example.SerializeToString()) print(">> Saving %d images in %s" %(images_num, tfrecord_file))
|-------dataset.py # 图片数据增强,数据加载
import cv2 import numpy as np from core import utils import tensorflow as tf class Parser(object): def __init__(self, image_h, image_w, anchors, num_classes, debug=False): self.anchors = anchors self.num_classes = num_classes self.image_h = image_h self.image_w = image_w self.debug = debug def flip_left_right(self, image, gt_boxes): w = tf.cast(tf.shape(image)[1], tf.float32) image = tf.image.flip_left_right(image) xmin, ymin, xmax, ymax, label = tf.unstack(gt_boxes, axis=1) xmin, ymin, xmax, ymax = w-xmax, ymin, w-xmin, ymax gt_boxes = tf.stack([xmin, ymin, xmax, ymax, label], axis=1) return image, gt_boxes def random_distort_color(self, image, gt_boxes): image = tf.image.random_brightness(image, max_delta=32./255.) image = tf.image.random_saturation(image, lower=0.8, upper=1.2) image = tf.image.random_hue(image, max_delta=0.2) image = tf.image.random_contrast(image, lower=0.8, upper=1.2) return image, gt_boxes def random_blur(self, image, gt_boxes): gaussian_blur = lambda image: cv2.GaussianBlur(image, (5, 5), 0) h, w = image.shape.as_list()[:2] image = tf.py_func(gaussian_blur, [image], tf.uint8) image.set_shape([h, w, 3]) return image, gt_boxes def random_crop(self, image, gt_boxes, min_object_covered=0.8, aspect_ratio_range=[0.8, 1.2], area_range=[0.5, 1.0]): h, w = tf.cast(tf.shape(image)[0], tf.float32), tf.cast(tf.shape(image)[1], tf.float32) xmin, ymin, xmax, ymax, label = tf.unstack(gt_boxes, axis=1) bboxes = tf.stack([ ymin/h, xmin/w, ymax/h, xmax/w], axis=1) bboxes = tf.clip_by_value(bboxes, 0, 1) begin, size, dist_boxes = tf.image.sample_distorted_bounding_box( tf.shape(image), bounding_boxes=tf.expand_dims(bboxes, axis=0), min_object_covered=min_object_covered, aspect_ratio_range=aspect_ratio_range, area_range=area_range) # NOTE dist_boxes with shape: [ymin, xmin, ymax, xmax] and in values in range(0, 1) # Employ the bounding box to distort the image. croped_box = [dist_boxes[0,0,1]*w, dist_boxes[0,0,0]*h, dist_boxes[0,0,3]*w, dist_boxes[0,0,2]*h] croped_xmin = tf.clip_by_value(xmin, croped_box[0], croped_box[2])-croped_box[0] croped_ymin = tf.clip_by_value(ymin, croped_box[1], croped_box[3])-croped_box[1] croped_xmax = tf.clip_by_value(xmax, croped_box[0], croped_box[2])-croped_box[0] croped_ymax = tf.clip_by_value(ymax, croped_box[1], croped_box[3])-croped_box[1] image = tf.slice(image, begin, size) gt_boxes = tf.stack([croped_xmin, croped_ymin, croped_xmax, croped_ymax, label], axis=1) return image, gt_boxes def preprocess(self, image, gt_boxes): ################################# data augmentation ################################## # data_aug_flag = tf.to_int32(tf.random_uniform(shape=[], minval=-5, maxval=5)) # caseO = tf.equal(data_aug_flag, 1), lambda: self.flip_left_right(image, gt_boxes) # case1 = tf.equal(data_aug_flag, 2), lambda: self.random_distort_color(image, gt_boxes) # case2 = tf.equal(data_aug_flag, 3), lambda: self.random_blur(image, gt_boxes) # case3 = tf.equal(data_aug_flag, 4), lambda: self.random_crop(image, gt_boxes) # image, gt_boxes = tf.case([caseO, case1, case2, case3], lambda: (image, gt_boxes)) image, gt_boxes = utils.resize_image_correct_bbox(image, gt_boxes, self.image_h, self.image_w) if self.debug: return image, gt_boxes y_true_13, y_true_26, y_true_52 = tf.py_func(self.preprocess_true_boxes, inp=[gt_boxes], Tout = [tf.float32, tf.float32, tf.float32]) image = image / 255. return image, y_true_13, y_true_26, y_true_52 def preprocess_true_boxes(self, gt_boxes): """ Preprocess true boxes to training input format Parameters: ----------- :param true_boxes: numpy.ndarray of shape [T, 4] T: the number of boxes in each image. 4: coordinate => x_min, y_min, x_max, y_max :param true_labels: class id :param input_shape: the shape of input image to the yolov3 network, [416, 416] :param anchors: array, shape=[9,2], 9: the number of anchors, 2: width, height :param num_classes: integer, for coco dataset, it is 80 Returns: ---------- y_true: list(3 array), shape like yolo_outputs, [13, 13, 3, 85] 13:cell szie, 3:number of anchors 85: box_centers, box_sizes, confidence, probability """ num_layers = len(self.anchors) // 3 anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]] grid_sizes = [[self.image_h//x, self.image_w//x] for x in (32, 16, 8)] box_centers = (gt_boxes[:, 0:2] + gt_boxes[:, 2:4]) / 2 # the center of box box_sizes = gt_boxes[:, 2:4] - gt_boxes[:, 0:2] # the height and width of box gt_boxes[:, 0:2] = box_centers gt_boxes[:, 2:4] = box_sizes y_true_13 = np.zeros(shape=[grid_sizes[0][0], grid_sizes[0][1], 3, 5+self.num_classes], dtype=np.float32) y_true_26 = np.zeros(shape=[grid_sizes[1][0], grid_sizes[1][1], 3, 5+self.num_classes], dtype=np.float32) y_true_52 = np.zeros(shape=[grid_sizes[2][0], grid_sizes[2][1], 3, 5+self.num_classes], dtype=np.float32) y_true = [y_true_13, y_true_26, y_true_52] anchors_max = self.anchors / 2. anchors_min = -anchors_max valid_mask = box_sizes[:, 0] > 0 # Discard zero rows. wh = box_sizes[valid_mask] # set the center of all boxes as the origin of their coordinates # and correct their coordinates wh = np.expand_dims(wh, -2) boxes_max = wh / 2. boxes_min = -boxes_max intersect_mins = np.maximum(boxes_min, anchors_min) intersect_maxs = np.minimum(boxes_max, anchors_max) intersect_wh = np.maximum(intersect_maxs - intersect_mins, 0.) intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1] box_area = wh[..., 0] * wh[..., 1] anchor_area = self.anchors[:, 0] * self.anchors[:, 1] iou = intersect_area / (box_area + anchor_area - intersect_area) # Find best anchor for each true box best_anchor = np.argmax(iou, axis=-1) for t, n in enumerate(best_anchor): for l in range(num_layers): if n not in anchor_mask[l]: continue i = np.floor(gt_boxes[t,0]/self.image_w*grid_sizes[l][1]).astype('int32') j = np.floor(gt_boxes[t,1]/self.image_h*grid_sizes[l][0]).astype('int32') k = anchor_mask[l].index(n) c = gt_boxes[t, 4].astype('int32') y_true[l][j, i, k, 0:4] = gt_boxes[t, 0:4] y_true[l][j, i, k, 4] = 1. y_true[l][j, i, k, 5+c] = 1. return y_true_13, y_true_26, y_true_52 def parser_example(self, serialized_example): features = tf.parse_single_example( serialized_example, features = { 'image' : tf.FixedLenFeature([], dtype = tf.string), 'boxes' : tf.FixedLenFeature([], dtype = tf.string), } ) image = tf.image.decode_jpeg(features['image'], channels = 3) image = tf.image.convert_image_dtype(image, tf.uint8) gt_boxes = tf.decode_raw(features['boxes'], tf.float32) gt_boxes = tf.reshape(gt_boxes, shape=[-1,5]) return self.preprocess(image, gt_boxes) class dataset(object): def __init__(self, parser, tfrecords_path, batch_size, shuffle=None, repeat=True): self.parser = parser self.filenames = tf.gfile.Glob(tfrecords_path) self.batch_size = batch_size self.shuffle = shuffle self.repeat = repeat self._buildup() def _buildup(self): try: self._TFRecordDataset = tf.data.TFRecordDataset(self.filenames) except: raise NotImplementedError("No tfrecords found!") self._TFRecordDataset = self._TFRecordDataset.map(map_func = self.parser.parser_example, num_parallel_calls = 10) self._TFRecordDataset = self._TFRecordDataset.repeat() if self.repeat else self._TFRecordDataset if self.shuffle is not None: self._TFRecordDataset = self._TFRecordDataset.shuffle(self.shuffle) self._TFRecordDataset = self._TFRecordDataset.batch(self.batch_size).prefetch(self.batch_size) self._iterator = self._TFRecordDataset.make_one_shot_iterator() def get_next(self): return self._iterator.get_next()
|-------utils.py # NMS,画检测框,从PB文件读取Tensors,计算MAP,FREEZE_GRAPH,加载权重文件,IOU计算
import colorsys import numpy as np import tensorflow as tf from collections import Counter from PIL import ImageFont, ImageDraw # Discard all boxes with low scores and high IOU def gpu_nms(boxes, scores, num_classes, max_boxes=50, score_thresh=0.3, iou_thresh=0.5): """ /*----------------------------------- NMS on gpu ---------------------------------------*/ Arguments: boxes -- tensor of shape [1, 10647, 4] # 10647 boxes scores -- tensor of shape [1, 10647, num_classes], scores of boxes classes -- the return value of function `read_coco_names` Note:Applies Non-max suppression (NMS) to set of boxes. Prunes away boxes that have high intersection-over-union (IOU) overlap with previously selected boxes. max_boxes -- integer, maximum number of predicted boxes you'd like, default is 20 score_thresh -- real value, if [ highest class probability score < score_threshold] then get rid of the corresponding box iou_thresh -- real value, "intersection over union" threshold used for NMS filtering """ boxes_list, label_list, score_list = [], [], [] max_boxes = tf.constant(max_boxes, dtype='int32') # since we do nms for single image, then reshape it boxes = tf.reshape(boxes, [-1,4]) # '-1' means we don't konw the exact number of boxes # confs = tf.reshape(confs, [-1,1]) score = tf.reshape(scores, [-1,num_classes]) # Step 1: Create a filtering mask based on "box_class_scores" by using "threshold". mask = tf.greater_equal(score, tf.constant(score_thresh)) # Step 2: Do non_max_suppression for each class for i in range(num_classes): # Step 3: Apply the mask to scores, boxes and pick them out filter_boxes = tf.boolean_mask(boxes, mask[:,i]) filter_score = tf.boolean_mask(score[:,i], mask[:,i]) nms_indices = tf.image.non_max_suppression(boxes=filter_boxes, scores=filter_score, max_output_size=max_boxes, iou_threshold=iou_thresh, name='nms_indices') label_list.append(tf.ones_like(tf.gather(filter_score, nms_indices), 'int32')*i) boxes_list.append(tf.gather(filter_boxes, nms_indices)) score_list.append(tf.gather(filter_score, nms_indices)) boxes = tf.concat(boxes_list, axis=0) score = tf.concat(score_list, axis=0) label = tf.concat(label_list, axis=0) return boxes, score, label def py_nms(boxes, scores, max_boxes=50, iou_thresh=0.5): """ Pure Python NMS baseline. Arguments: boxes => shape of [-1, 4], the value of '-1' means that dont know the exact number of boxes scores => shape of [-1,] max_boxes => representing the maximum of boxes to be selected by non_max_suppression iou_thresh => representing iou_threshold for deciding to keep boxes """ assert boxes.shape[1] == 4 and len(scores.shape) == 1 x1 = boxes[:, 0] y1 = boxes[:, 1] x2 = boxes[:, 2] y2 = boxes[:, 3] areas = (x2 - x1 + 1) * (y2 - y1 + 1) order = scores.argsort()[::-1] keep = [] while order.size > 0: i = order[0] keep.append(i) xx1 = np.maximum(x1[i], x1[order[1:]]) yy1 = np.maximum(y1[i], y1[order[1:]]) xx2 = np.minimum(x2[i], x2[order[1:]]) yy2 = np.minimum(y2[i], y2[order[1:]]) w = np.maximum(0.0, xx2 - xx1 + 1) h = np.maximum(0.0, yy2 - yy1 + 1) inter = w * h ovr = inter / (areas[i] + areas[order[1:]] - inter) inds = np.where(ovr <= iou_thresh)[0] order = order[inds + 1] return keep[:max_boxes] def cpu_nms(boxes, scores, num_classes, max_boxes=50, score_thresh=0.3, iou_thresh=0.5): """ /*----------------------------------- NMS on cpu ---------------------------------------*/ Arguments: boxes ==> shape [1, 10647, 4] scores ==> shape [1, 10647, num_classes] """ boxes = boxes.reshape(-1, 4) scores = scores.reshape(-1, num_classes) # Picked bounding boxes picked_boxes, picked_score, picked_label = [], [], [] for i in range(num_classes): indices = np.where(scores[:,i] >= score_thresh) filter_boxes = boxes[indices] filter_scores = scores[:,i][indices] if len(filter_boxes) == 0: continue # do non_max_suppression on the cpu indices = py_nms(filter_boxes, filter_scores, max_boxes=max_boxes, iou_thresh=iou_thresh) picked_boxes.append(filter_boxes[indices]) picked_score.append(filter_scores[indices]) picked_label.append(np.ones(len(indices), dtype='int32')*i) if len(picked_boxes) == 0: return None, None, None boxes = np.concatenate(picked_boxes, axis=0) score = np.concatenate(picked_score, axis=0) label = np.concatenate(picked_label, axis=0) return boxes, score, label def resize_image_correct_bbox(image, boxes, image_h, image_w): origin_image_size = tf.to_float(tf.shape(image)[0:2]) image = tf.image.resize_images(image, size=[image_h, image_w]) # correct bbox xx1 = boxes[:, 0] * image_w / origin_image_size[1] yy1 = boxes[:, 1] * image_h / origin_image_size[0] xx2 = boxes[:, 2] * image_w / origin_image_size[1] yy2 = boxes[:, 3] * image_h / origin_image_size[0] idx = boxes[:, 4] boxes = tf.stack([xx1, yy1, xx2, yy2, idx], axis=1) return image, boxes def draw_boxes(image, boxes, scores, labels, classes, detection_size, font='./data/font/FiraMono-Medium.otf', show=True): """ :param boxes, shape of [num, 4] :param scores, shape of [num, ] :param labels, shape of [num, ] :param image, :param classes, the return list from the function `read_coco_names` """ if boxes is None: return image draw = ImageDraw.Draw(image) # draw settings font = ImageFont.truetype(font = font, size = np.floor(2e-2 * image.size[1]).astype('int32')) hsv_tuples = [( x / len(classes), 0.9, 1.0) for x in range(len(classes))] colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples)) colors = list(map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)), colors)) for i in range(len(labels)): # for each bounding box, do: bbox, score, label = boxes[i], scores[i], classes[labels[i]] bbox_text = "%s %.2f" %(label, score) text_size = draw.textsize(bbox_text, font) # convert_to_original_size detection_size, original_size = np.array(detection_size), np.array(image.size) ratio = original_size / detection_size bbox = list((bbox.reshape(2,2) * ratio).reshape(-1)) draw.rectangle(bbox, outline=colors[labels[i]], width=3) text_origin = bbox[:2]-np.array([0, text_size[1]]) draw.rectangle([tuple(text_origin), tuple(text_origin+text_size)], fill=colors[labels[i]]) # # draw bbox draw.text(tuple(text_origin), bbox_text, fill=(0,0,0), font=font) image.show() if show else None return image def read_coco_names(class_file_name): names = {} with open(class_file_name, 'r') as data: for ID, name in enumerate(data): names[ID] = name.strip('\n') return names def freeze_graph(sess, output_file, output_node_names): output_graph_def = tf.graph_util.convert_variables_to_constants( sess, sess.graph.as_graph_def(), output_node_names, ) with tf.gfile.GFile(output_file, "wb") as f: f.write(output_graph_def.SerializeToString()) print("=> {} ops written to {}.".format(len(output_graph_def.node), output_file)) def read_pb_return_tensors(graph, pb_file, return_elements): with tf.gfile.FastGFile(pb_file, 'rb') as f: frozen_graph_def = tf.GraphDef() frozen_graph_def.ParseFromString(f.read()) with graph.as_default(): return_elements = tf.import_graph_def(frozen_graph_def, return_elements=return_elements) input_tensor, output_tensors = return_elements[0], return_elements[1:] return input_tensor, output_tensors def load_weights(var_list, weights_file): """ Loads and converts pre-trained weights. :param var_list: list of network variables. :param weights_file: name of the binary file. :return: list of assign ops """ with open(weights_file, "rb") as fp: np.fromfile(fp, dtype=np.int32, count=5) weights = np.fromfile(fp, dtype=np.float32) ptr = 0 i = 0 assign_ops = [] while i < len(var_list) - 1: var1 = var_list[i] print("=> loading ", var1.name) var2 = var_list[i + 1] print("=> loading ", var2.name) # do something only if we process conv layer if 'Conv' in var1.name.split('/')[-2]: # check type of next layer if 'BatchNorm' in var2.name.split('/')[-2]: # load batch norm params gamma, beta, mean, var = var_list[i + 1:i + 5] batch_norm_vars = [beta, gamma, mean, var] for var in batch_norm_vars: shape = var.shape.as_list() num_params = np.prod(shape) var_weights = weights[ptr:ptr + num_params].reshape(shape) ptr += num_params assign_ops.append(tf.assign(var, var_weights, validate_shape=True)) # we move the pointer by 4, because we loaded 4 variables i += 4 elif 'Conv' in var2.name.split('/')[-2]: # load biases bias = var2 bias_shape = bias.shape.as_list() bias_params = np.prod(bias_shape) bias_weights = weights[ptr:ptr + bias_params].reshape(bias_shape) ptr += bias_params assign_ops.append(tf.assign(bias, bias_weights, validate_shape=True)) # we loaded 1 variable i += 1 # we can load weights of conv layer shape = var1.shape.as_list() num_params = np.prod(shape) var_weights = weights[ptr:ptr + num_params].reshape( (shape[3], shape[2], shape[0], shape[1])) # remember to transpose to column-major var_weights = np.transpose(var_weights, (2, 3, 1, 0)) ptr += num_params assign_ops.append( tf.assign(var1, var_weights, validate_shape=True)) i += 1 return assign_ops def get_anchors(anchors_path, image_h, image_w): '''loads the anchors from a file''' with open(anchors_path) as f: anchors = f.readline() anchors = np.array(anchors.split(), dtype=np.float32) anchors = anchors.reshape(-1,2) anchors[:, 1] = anchors[:, 1] * image_h anchors[:, 0] = anchors[:, 0] * image_w return anchors.astype(np.int32) def bbox_iou(A, B): intersect_mins = np.maximum(A[:, 0:2], B[:, 0:2]) intersect_maxs = np.minimum(A[:, 2:4], B[:, 2:4]) intersect_wh = np.maximum(intersect_maxs - intersect_mins, 0.) intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1] A_area = np.prod(A[:, 2:4] - A[:, 0:2], axis=1) B_area = np.prod(B[:, 2:4] - B[:, 0:2], axis=1) iou = intersect_area / (A_area + B_area - intersect_area) return iou def evaluate(y_pred, y_true, iou_thresh=0.5, score_thresh=0.3): num_images = y_true[0].shape[0] num_classes = y_true[0][0][..., 5:].shape[-1] true_labels_dict = {i:0 for i in range(num_classes)} # {class: count} pred_labels_dict = {i:0 for i in range(num_classes)} true_positive_dict = {i:0 for i in range(num_classes)} for i in range(num_images): true_labels_list, true_boxes_list = [], [] for j in range(3): # three feature maps true_probs_temp = y_true[j][i][...,5: ] true_boxes_temp = y_true[j][i][...,0:4] object_mask = true_probs_temp.sum(axis=-1) > 0 true_probs_temp = true_probs_temp[object_mask] true_boxes_temp = true_boxes_temp[object_mask] true_labels_list += np.argmax(true_probs_temp, axis=-1).tolist() true_boxes_list += true_boxes_temp.tolist() if len(true_labels_list) != 0: for cls, count in Counter(true_labels_list).items(): true_labels_dict[cls] += count pred_boxes = y_pred[0][i:i+1] pred_confs = y_pred[1][i:i+1] pred_probs = y_pred[2][i:i+1] pred_boxes, pred_scores, pred_labels = cpu_nms(pred_boxes, pred_confs*pred_probs, num_classes, score_thresh=score_thresh, iou_thresh=iou_thresh) true_boxes = np.array(true_boxes_list) box_centers, box_sizes = true_boxes[:,0:2], true_boxes[:,2:4] true_boxes[:,0:2] = box_centers - box_sizes / 2. true_boxes[:,2:4] = true_boxes[:,0:2] + box_sizes pred_labels_list = [] if pred_labels is None else pred_labels.tolist() if len(pred_labels_list) != 0: for cls, count in Counter(pred_labels_list).items(): pred_labels_dict[cls] += count else: continue detected = [] for k in range(len(pred_labels_list)): # compute iou between predicted box and ground_truth boxes iou = bbox_iou(pred_boxes[k:k+1], true_boxes) m = np.argmax(iou) # Extract index of largest overlap if iou[m] >= iou_thresh and pred_labels_list[k] == true_labels_list[m] and m not in detected: true_positive_dict[true_labels_list[m]] += 1 detected.append(m) recall = sum(true_positive_dict.values()) / (sum(true_labels_dict.values()) + 1e-6) precision = sum(true_positive_dict.values()) / (sum(pred_labels_dict.values()) + 1e-6) return recall, precision def compute_ap(recall, precision): """ Compute the average precision, given the recall and precision curves. Code originally from https://github.com/rbgirshick/py-faster-rcnn. # Arguments recall: The recall curve (list). precision: The precision curve (list). # Returns The average precision as computed in py-faster-rcnn. """ # correct AP calculation # first append sentinel values at the end mrec = np.concatenate(([0.0], recall, [1.0])) mpre = np.concatenate(([0.0], precision, [0.0])) # compute the precision envelope for i in range(mpre.size - 1, 0, -1): mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i]) # to calculate area under PR curve, look for points # where X axis (recall) changes value i = np.where(mrec[1:] != mrec[:-1])[0] # and sum (\Delta recall) * prec ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1]) return ap
|-------common.py # 卷积层Pad 使用Slim
import tensorflow as tf slim = tf.contrib.slim def _conv2d_fixed_padding(inputs, filters, kernel_size, strides=1): if strides > 1: inputs = _fixed_padding(inputs, kernel_size) inputs = slim.conv2d(inputs, filters, kernel_size, stride=strides, padding=('SAME' if strides == 1 else 'VALID')) return inputs @tf.contrib.framework.add_arg_scope def _fixed_padding(inputs, kernel_size, *args, mode='CONSTANT', **kwargs): """ Pads the input along the spatial dimensions independently of input size. Args: inputs: A tensor of size [batch, channels, height_in, width_in] or [batch, height_in, width_in, channels] depending on data_format. kernel_size: The kernel to be used in the conv2d or max_pool2d operation. Should be a positive integer. mode: The mode for tf.pad. Returns: A tensor with the same format as the input with the data either intact (if kernel_size == 1) or padded (if kernel_size > 1). """ pad_total = kernel_size - 1 pad_beg = pad_total // 2 pad_end = pad_total - pad_beg padded_inputs = tf.pad(inputs, [[0, 0], [pad_beg, pad_end], [pad_beg, pad_end], [0, 0]], mode=mode) return padded_inputs
|-------yolov3.py #定义Darknet53,yolov3
import tensorflow as tf from core import common slim = tf.contrib.slim class darknet53(object): """network for performing feature extraction""" def __init__(self, inputs): self.outputs = self.forward(inputs) def _darknet53_block(self, inputs, filters): """ implement residuals block in darknet53 """ shortcut = inputs inputs = common._conv2d_fixed_padding(inputs, filters * 1, 1) inputs = common._conv2d_fixed_padding(inputs, filters * 2, 3) inputs = inputs + shortcut return inputs def forward(self, inputs): inputs = common._conv2d_fixed_padding(inputs, 32, 3, strides=1) inputs = common._conv2d_fixed_padding(inputs, 64, 3, strides=2) inputs = self._darknet53_block(inputs, 32) inputs = common._conv2d_fixed_padding(inputs, 128, 3, strides=2) for i in range(2): inputs = self._darknet53_block(inputs, 64) inputs = common._conv2d_fixed_padding(inputs, 256, 3, strides=2) for i in range(8): inputs = self._darknet53_block(inputs, 128) route_1 = inputs inputs = common._conv2d_fixed_padding(inputs, 512, 3, strides=2) for i in range(8): inputs = self._darknet53_block(inputs, 256) route_2 = inputs inputs = common._conv2d_fixed_padding(inputs, 1024, 3, strides=2) for i in range(4): inputs = self._darknet53_block(inputs, 512) return route_1, route_2, inputs class yolov3(object): def __init__(self, num_classes, anchors, batch_norm_decay=0.9, leaky_relu=0.1): # self._ANCHORS = [[10 ,13], [16 , 30], [33 , 23], # [30 ,61], [62 , 45], [59 ,119], # [116,90], [156,198], [373,326]] self._ANCHORS = anchors self._BATCH_NORM_DECAY = batch_norm_decay self._LEAKY_RELU = leaky_relu self._NUM_CLASSES = num_classes self.feature_maps = [] # [[None, 13, 13, 255], [None, 26, 26, 255], [None, 52, 52, 255]] def _yolo_block(self, inputs, filters): inputs = common._conv2d_fixed_padding(inputs, filters * 1, 1) inputs = common._conv2d_fixed_padding(inputs, filters * 2, 3) inputs = common._conv2d_fixed_padding(inputs, filters * 1, 1) inputs = common._conv2d_fixed_padding(inputs, filters * 2, 3) inputs = common._conv2d_fixed_padding(inputs, filters * 1, 1) route = inputs inputs = common._conv2d_fixed_padding(inputs, filters * 2, 3) return route, inputs def _detection_layer(self, inputs, anchors): num_anchors = len(anchors) feature_map = slim.conv2d(inputs, num_anchors * (5 + self._NUM_CLASSES), 1, stride=1, normalizer_fn=None, activation_fn=None, biases_initializer=tf.zeros_initializer()) return feature_map def _reorg_layer(self, feature_map, anchors): num_anchors = len(anchors) # num_anchors=3 grid_size = feature_map.shape.as_list()[1:3] # the downscale image in height and weight stride = tf.cast(self.img_size // grid_size, tf.float32) # [h,w] -> [y,x] feature_map = tf.reshape(feature_map, [-1, grid_size[0], grid_size[1], num_anchors, 5 + self._NUM_CLASSES]) box_centers, box_sizes, conf_logits, prob_logits = tf.split( feature_map, [2, 2, 1, self._NUM_CLASSES], axis=-1) box_centers = tf.nn.sigmoid(box_centers) grid_x = tf.range(grid_size[1], dtype=tf.int32) grid_y = tf.range(grid_size[0], dtype=tf.int32) a, b = tf.meshgrid(grid_x, grid_y) x_offset = tf.reshape(a, (-1, 1)) y_offset = tf.reshape(b, (-1, 1)) x_y_offset = tf.concat([x_offset, y_offset], axis=-1) x_y_offset = tf.reshape(x_y_offset, [grid_size[0], grid_size[1], 1, 2]) x_y_offset = tf.cast(x_y_offset, tf.float32) box_centers = box_centers + x_y_offset box_centers = box_centers * stride[::-1] box_sizes = tf.exp(box_sizes) * anchors # anchors -> [w, h] boxes = tf.concat([box_centers, box_sizes], axis=-1) return x_y_offset, boxes, conf_logits, prob_logits @staticmethod def _upsample(inputs, out_shape): new_height, new_width = out_shape[1], out_shape[2] inputs = tf.image.resize_nearest_neighbor(inputs, (new_height, new_width)) inputs = tf.identity(inputs, name='upsampled') return inputs # @staticmethod # def _upsample(inputs, out_shape): # """ # replace resize_nearest_neighbor with conv2d_transpose To support TensorRT 5 optimization # """ # new_height, new_width = out_shape[1], out_shape[2] # filters = 256 if (new_height == 26 and new_width==26) else 128 # inputs = tf.layers.conv2d_transpose(inputs, filters, kernel_size=3, padding='same', # strides=(2,2), kernel_initializer=tf.ones_initializer()) # return inputs def forward(self, inputs, is_training=False, reuse=False): """ Creates YOLO v3 model. :param inputs: a 4-D tensor of size [batch_size, height, width, channels]. Dimension batch_size may be undefined. The channel order is RGB. :param is_training: whether is training or not. :param reuse: whether or not the network and its variables should be reused. :return: """ # it will be needed later on self.img_size = tf.shape(inputs)[1:3] # set batch norm params batch_norm_params = { 'decay': self._BATCH_NORM_DECAY, 'epsilon': 1e-05, 'scale': True, 'is_training': is_training, 'fused': None, # Use fused batch norm if possible. } # Set activation_fn and parameters for conv2d, batch_norm. with slim.arg_scope([slim.conv2d, slim.batch_norm, common._fixed_padding],reuse=reuse): with slim.arg_scope([slim.conv2d], normalizer_fn=slim.batch_norm, normalizer_params=batch_norm_params, biases_initializer=None, activation_fn=lambda x: tf.nn.leaky_relu(x, alpha=self._LEAKY_RELU)): with tf.variable_scope('darknet-53'): route_1, route_2, inputs = darknet53(inputs).outputs with tf.variable_scope('yolo-v3'): route, inputs = self._yolo_block(inputs, 512) feature_map_1 = self._detection_layer(inputs, self._ANCHORS[6:9]) feature_map_1 = tf.identity(feature_map_1, name='feature_map_1') inputs = common._conv2d_fixed_padding(route, 256, 1) upsample_size = route_2.get_shape().as_list() inputs = self._upsample(inputs, upsample_size) inputs = tf.concat([inputs, route_2], axis=3) route, inputs = self._yolo_block(inputs, 256) feature_map_2 = self._detection_layer(inputs, self._ANCHORS[3:6]) feature_map_2 = tf.identity(feature_map_2, name='feature_map_2') inputs = common._conv2d_fixed_padding(route, 128, 1) upsample_size = route_1.get_shape().as_list() inputs = self._upsample(inputs, upsample_size) inputs = tf.concat([inputs, route_1], axis=3) route, inputs = self._yolo_block(inputs, 128) feature_map_3 = self._detection_layer(inputs, self._ANCHORS[0:3]) feature_map_3 = tf.identity(feature_map_3, name='feature_map_3') return feature_map_1, feature_map_2, feature_map_3 def _reshape(self, x_y_offset, boxes, confs, probs): grid_size = x_y_offset.shape.as_list()[:2] boxes = tf.reshape(boxes, [-1, grid_size[0]*grid_size[1]*3, 4]) confs = tf.reshape(confs, [-1, grid_size[0]*grid_size[1]*3, 1]) probs = tf.reshape(probs, [-1, grid_size[0]*grid_size[1]*3, self._NUM_CLASSES]) return boxes, confs, probs def predict(self, feature_maps): """ Note: given by feature_maps, compute the receptive field and get boxes, confs and class_probs input_argument: feature_maps -> [None, 13, 13, 255], [None, 26, 26, 255], [None, 52, 52, 255], """ feature_map_1, feature_map_2, feature_map_3 = feature_maps feature_map_anchors = [(feature_map_1, self._ANCHORS[6:9]), (feature_map_2, self._ANCHORS[3:6]), (feature_map_3, self._ANCHORS[0:3]),] results = [self._reorg_layer(feature_map, anchors) for (feature_map, anchors) in feature_map_anchors] boxes_list, confs_list, probs_list = [], [], [] for result in results: boxes, conf_logits, prob_logits = self._reshape(*result) confs = tf.sigmoid(conf_logits) probs = tf.sigmoid(prob_logits) boxes_list.append(boxes) confs_list.append(confs) probs_list.append(probs) boxes = tf.concat(boxes_list, axis=1) confs = tf.concat(confs_list, axis=1) probs = tf.concat(probs_list, axis=1) center_x, center_y, width, height = tf.split(boxes, [1,1,1,1], axis=-1) x0 = center_x - width / 2. y0 = center_y - height / 2. x1 = center_x + width / 2. y1 = center_y + height / 2. boxes = tf.concat([x0, y0, x1, y1], axis=-1) return boxes, confs, probs def compute_loss(self, pred_feature_map, y_true, ignore_thresh=0.5, max_box_per_image=8): """ Note: compute the loss Arguments: y_pred, list -> [feature_map_1, feature_map_2, feature_map_3] the shape of [None, 13, 13, 3*85]. etc """ loss_xy, loss_wh, loss_conf, loss_class = 0., 0., 0., 0. total_loss = 0. # total_loss, rec_50, rec_75, avg_iou = 0., 0., 0., 0. _ANCHORS = [self._ANCHORS[6:9], self._ANCHORS[3:6], self._ANCHORS[0:3]] for i in range(len(pred_feature_map)): result = self.loss_layer(pred_feature_map[i], y_true[i], _ANCHORS[i]) loss_xy += result[0] loss_wh += result[1] loss_conf += result[2] loss_class += result[3] total_loss = loss_xy + loss_wh + loss_conf + loss_class return [total_loss, loss_xy, loss_wh, loss_conf, loss_class] def loss_layer(self, feature_map_i, y_true, anchors): # size in [h, w] format! don't get messed up! grid_size = tf.shape(feature_map_i)[1:3] grid_size_ = feature_map_i.shape.as_list()[1:3] y_true = tf.reshape(y_true, [-1, grid_size_[0], grid_size_[1], 3, 5+self._NUM_CLASSES]) # the downscale ratio in height and weight ratio = tf.cast(self.img_size / grid_size, tf.float32) # N: batch_size N = tf.cast(tf.shape(feature_map_i)[0], tf.float32) x_y_offset, pred_boxes, pred_conf_logits, pred_prob_logits = self._reorg_layer(feature_map_i, anchors) # shape: take 416x416 input image and 13*13 feature_map for example: # [N, 13, 13, 3, 1] object_mask = y_true[..., 4:5] # shape: [N, 13, 13, 3, 4] & [N, 13, 13, 3] ==> [V, 4] # V: num of true gt box valid_true_boxes = tf.boolean_mask(y_true[..., 0:4], tf.cast(object_mask[..., 0], 'bool')) # shape: [V, 2] valid_true_box_xy = valid_true_boxes[:, 0:2] valid_true_box_wh = valid_true_boxes[:, 2:4] # shape: [N, 13, 13, 3, 2] pred_box_xy = pred_boxes[..., 0:2] pred_box_wh = pred_boxes[..., 2:4] # calc iou # shape: [N, 13, 13, 3, V] iou = self._broadcast_iou(valid_true_box_xy, valid_true_box_wh, pred_box_xy, pred_box_wh) # shape: [N, 13, 13, 3] best_iou = tf.reduce_max(iou, axis=-1) # get_ignore_mask ignore_mask = tf.cast(best_iou < 0.5, tf.float32) # shape: [N, 13, 13, 3, 1] ignore_mask = tf.expand_dims(ignore_mask, -1) # get xy coordinates in one cell from the feature_map # numerical range: 0 ~ 1 # shape: [N, 13, 13, 3, 2] true_xy = y_true[..., 0:2] / ratio[::-1] - x_y_offset pred_xy = pred_box_xy / ratio[::-1] - x_y_offset # get_tw_th, numerical range: 0 ~ 1 # shape: [N, 13, 13, 3, 2] true_tw_th = y_true[..., 2:4] / anchors pred_tw_th = pred_box_wh / anchors # for numerical stability true_tw_th = tf.where(condition=tf.equal(true_tw_th, 0), x=tf.ones_like(true_tw_th), y=true_tw_th) pred_tw_th = tf.where(condition=tf.equal(pred_tw_th, 0), x=tf.ones_like(pred_tw_th), y=pred_tw_th) true_tw_th = tf.log(tf.clip_by_value(true_tw_th, 1e-9, 1e9)) pred_tw_th = tf.log(tf.clip_by_value(pred_tw_th, 1e-9, 1e9)) # box size punishment: # box with smaller area has bigger weight. This is taken from the yolo darknet C source code. # shape: [N, 13, 13, 3, 1] #why use box_loss_scale? box_loss_scale = 2. - (y_true[..., 2:3] / tf.cast(self.img_size[1], tf.float32)) * (y_true[..., 3:4] / tf.cast(self.img_size[0], tf.float32)) # shape: [N, 13, 13, 3, 1] xy_loss = tf.reduce_sum(tf.square(true_xy - pred_xy) * object_mask * box_loss_scale) / N wh_loss = tf.reduce_sum(tf.square(true_tw_th - pred_tw_th) * object_mask * box_loss_scale) / N # shape: [N, 13, 13, 3, 1] conf_pos_mask = object_mask conf_neg_mask = (1 - object_mask) * ignore_mask conf_loss_pos = conf_pos_mask * tf.nn.sigmoid_cross_entropy_with_logits(labels=object_mask, logits=pred_conf_logits) conf_loss_neg = conf_neg_mask * tf.nn.sigmoid_cross_entropy_with_logits(labels=object_mask, logits=pred_conf_logits) conf_loss = tf.reduce_sum(conf_loss_pos + conf_loss_neg) / N # shape: [N, 13, 13, 3, 1] class_loss = object_mask * tf.nn.sigmoid_cross_entropy_with_logits(labels=y_true[..., 5:], logits=pred_prob_logits) class_loss = tf.reduce_sum(class_loss) / N return xy_loss, wh_loss, conf_loss, class_loss def _broadcast_iou(self, true_box_xy, true_box_wh, pred_box_xy, pred_box_wh): ''' maintain an efficient way to calculate the ios matrix between ground truth true boxes and the predicted boxes note: here we only care about the size match ''' # shape: # true_box_??: [V, 2] # pred_box_??: [N, 13, 13, 3, 2] # shape: [N, 13, 13, 3, 1, 2] pred_box_xy = tf.expand_dims(pred_box_xy, -2) pred_box_wh = tf.expand_dims(pred_box_wh, -2) # shape: [1, V, 2] true_box_xy = tf.expand_dims(true_box_xy, 0) true_box_wh = tf.expand_dims(true_box_wh, 0) # [N, 13, 13, 3, 1, 2] & [1, V, 2] ==> [N, 13, 13, 3, V, 2] intersect_mins = tf.maximum(pred_box_xy - pred_box_wh / 2., true_box_xy - true_box_wh / 2.) intersect_maxs = tf.minimum(pred_box_xy + pred_box_wh / 2., true_box_xy + true_box_wh / 2.) intersect_wh = tf.maximum(intersect_maxs - intersect_mins, 0.) # shape: [N, 13, 13, 3, V] intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1] # shape: [N, 13, 13, 3, 1] pred_box_area = pred_box_wh[..., 0] * pred_box_wh[..., 1] # shape: [1, V] true_box_area = true_box_wh[..., 0] * true_box_wh[..., 1] # [N, 13, 13, 3, V] iou = intersect_area / (pred_box_area + true_box_area - intersect_area) return iou
|-------convert_weight.py 将darknet(c版)yolov3权重转换成tensorflow版pb
import os import sys import wget import time import argparse import tensorflow as tf from core import yolov3, utils class parser(argparse.ArgumentParser): def __init__(self,description): super(parser, self).__init__(description) self.add_argument( "--ckpt_file", "-cf", default='./checkpoint/yolov3.ckpt', type=str, help="[default: %(default)s] The checkpoint file ...", metavar="<CF>", ) self.add_argument( "--num_classes", "-nc", default=80, type=int, help="[default: %(default)s] The number of classes ...", metavar="<NC>", ) self.add_argument( "--anchors_path", "-ap", default="./data/coco_anchors.txt", type=str, help="[default: %(default)s] The path of anchors ...", metavar="<AP>", ) self.add_argument( "--weights_path", "-wp", default='./checkpoint/yolov3.weights', type=str, help="[default: %(default)s] Download binary file with desired weights", metavar="<WP>", ) self.add_argument( "--convert", "-cv", action='store_true', help="[default: %(default)s] Downloading yolov3 weights and convert them", ) self.add_argument( "--freeze", "-fz", action='store_true', help="[default: %(default)s] freeze the yolov3 graph to pb ...", ) self.add_argument( "--image_h", "-ih", default=416, type=int, help="[default: %(default)s] The height of image, 416 or 608", metavar="<IH>", ) self.add_argument( "--image_w", "-iw", default=416, type=int, help="[default: %(default)s] The width of image, 416 or 608", metavar="<IW>", ) self.add_argument( "--iou_threshold", "-it", default=0.5, type=float, help="[default: %(default)s] The iou_threshold for gpu nms", metavar="<IT>", ) self.add_argument( "--score_threshold", "-st", default=0.5, type=float, help="[default: %(default)s] The score_threshold for gpu nms", metavar="<ST>", ) def main(argv): flags = parser(description="freeze yolov3 graph from checkpoint file").parse_args() print("=> the input image size is [%d, %d]" %(flags.image_h, flags.image_w)) anchors = utils.get_anchors(flags.anchors_path, flags.image_h, flags.image_w) model = yolov3.yolov3(flags.num_classes, anchors) with tf.Graph().as_default() as graph: sess = tf.Session(graph=graph) inputs = tf.placeholder(tf.float32, [1, flags.image_h, flags.image_w, 3]) # placeholder for detector inputs print("=>", inputs) with tf.variable_scope('yolov3'): feature_map = model.forward(inputs, is_training=False) boxes, confs, probs = model.predict(feature_map) scores = confs * probs print("=>", boxes.name[:-2], scores.name[:-2]) cpu_out_node_names = [boxes.name[:-2], scores.name[:-2]] boxes, scores, labels = utils.gpu_nms(boxes, scores, flags.num_classes, score_thresh=flags.score_threshold, iou_thresh=flags.iou_threshold) print("=>", boxes.name[:-2], scores.name[:-2], labels.name[:-2]) gpu_out_node_names = [boxes.name[:-2], scores.name[:-2], labels.name[:-2]] feature_map_1, feature_map_2, feature_map_3 = feature_map saver = tf.train.Saver(var_list=tf.global_variables(scope='yolov3')) if flags.convert: if not os.path.exists(flags.weights_path): url = 'https://github.com/YunYang1994/tensorflow-yolov3/releases/download/v1.0/yolov3.weights' for i in range(3): time.sleep(1) print("=> %s does not exists ! " %flags.weights_path) print("=> It will take a while to download it from %s" %url) print('=> Downloading yolov3 weights ... ') wget.download(url, flags.weights_path) load_ops = utils.load_weights(tf.global_variables(scope='yolov3'), flags.weights_path) sess.run(load_ops) save_path = saver.save(sess, save_path=flags.ckpt_file) print('=> model saved in path: {}'.format(save_path)) if flags.freeze: saver.restore(sess, flags.ckpt_file) print('=> checkpoint file restored from ', flags.ckpt_file) utils.freeze_graph(sess, './checkpoint/yolov3_cpu_nms.pb', cpu_out_node_names) utils.freeze_graph(sess, './checkpoint/yolov3_gpu_nms.pb', gpu_out_node_names) if __name__ == "__main__": main(sys.argv)
|------yolov3_train.py #加载参数,数据,训练
import tensorflow as tf from core import utils, yolov3 from core.dataset import dataset, Parser sess = tf.Session() IMAGE_H, IMAGE_W = 416, 416 BATCH_SIZE = 8 STEPS = 2500 LR = 0.001 # if Nan, set 0.0005, 0.0001 DECAY_STEPS = 100 DECAY_RATE = 0.9 SHUFFLE_SIZE = 200 CLASSES = utils.read_coco_names('./data/raccoon.names') ANCHORS = utils.get_anchors('./data/raccoon_anchors.txt', IMAGE_H, IMAGE_W) NUM_CLASSES = len(CLASSES) EVAL_INTERNAL = 100 SAVE_INTERNAL = 500 train_tfrecord = "./raccoon_dataset/raccoon_train.tfrecords" test_tfrecord = "./raccoon_dataset/raccoon_test.tfrecords" parser = Parser(IMAGE_H, IMAGE_W, ANCHORS, NUM_CLASSES) trainset = dataset(parser, train_tfrecord, BATCH_SIZE, shuffle=SHUFFLE_SIZE) testset = dataset(parser, test_tfrecord , BATCH_SIZE, shuffle=None) is_training = tf.placeholder(tf.bool) example = tf.cond(is_training, lambda: trainset.get_next(), lambda: testset.get_next()) images, *y_true = example model = yolov3.yolov3(NUM_CLASSES, ANCHORS) with tf.variable_scope('yolov3'): pred_feature_map = model.forward(images, is_training=is_training) loss = model.compute_loss(pred_feature_map, y_true) y_pred = model.predict(pred_feature_map) tf.summary.scalar("loss/coord_loss", loss[1]) tf.summary.scalar("loss/sizes_loss", loss[2]) tf.summary.scalar("loss/confs_loss", loss[3]) tf.summary.scalar("loss/class_loss", loss[4]) global_step = tf.Variable(0, trainable=False, collections=[tf.GraphKeys.LOCAL_VARIABLES]) write_op = tf.summary.merge_all() writer_train = tf.summary.FileWriter("./data/train") writer_test = tf.summary.FileWriter("./data/test") saver_to_restore = tf.train.Saver(var_list=tf.contrib.framework.get_variables_to_restore(include=["yolov3/darknet-53"])) update_vars = tf.contrib.framework.get_variables_to_restore(include=["yolov3/yolo-v3"]) learning_rate = tf.train.exponential_decay(LR, global_step, decay_steps=DECAY_STEPS, decay_rate=DECAY_RATE, staircase=True) optimizer = tf.train.AdamOptimizer(learning_rate) # set dependencies for BN ops update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS) with tf.control_dependencies(update_ops): train_op = optimizer.minimize(loss[0], var_list=update_vars, global_step=global_step) sess.run([tf.global_variables_initializer(), tf.local_variables_initializer()]) saver_to_restore.restore(sess, "./checkpoint/yolov3.ckpt") saver = tf.train.Saver(max_to_keep=2) for step in range(STEPS): run_items = sess.run([train_op, write_op, y_pred, y_true] + loss, feed_dict={is_training:True}) if (step+1) % EVAL_INTERNAL == 0: train_rec_value, train_prec_value = utils.evaluate(run_items[2], run_items[3]) writer_train.add_summary(run_items[1], global_step=step) writer_train.flush() # Flushes the event file to disk if (step+1) % SAVE_INTERNAL == 0: saver.save(sess, save_path="./checkpoint/yolov3.ckpt", global_step=step+1) print("=> STEP %10d [TRAIN]:\tloss_xy:%7.4f \tloss_wh:%7.4f \tloss_conf:%7.4f \tloss_class:%7.4f" %(step+1, run_items[5], run_items[6], run_items[7], run_items[8])) run_items = sess.run([write_op, y_pred, y_true] + loss, feed_dict={is_training:False}) if (step+1) % EVAL_INTERNAL == 0: test_rec_value, test_prec_value = utils.evaluate(run_items[1], run_items[2]) print("\n=======================> evaluation result <================================\n") print("=> STEP %10d [TRAIN]:\trecall:%7.4f \tprecision:%7.4f" %(step+1, train_rec_value, train_prec_value)) print("=> STEP %10d [VALID]:\trecall:%7.4f \tprecision:%7.4f" %(step+1, test_rec_value, test_prec_value)) print("\n=======================> evaluation result <================================\n") writer_test.add_summary(run_items[0], global_step=step) writer_test.flush() # Flushes the event file to disk
|------evaluate.py # 评估模型效果
import sys import numpy as np import tensorflow as tf from tqdm import tqdm from PIL import Image from core import utils, yolov3 from core.dataset import dataset, Parser sess = tf.Session() IMAGE_H, IMAGE_W = 416, 416 CLASSES = utils.read_coco_names('./data/raccoon.names') NUM_CLASSES = len(CLASSES) ANCHORS = utils.get_anchors('./data/raccoon_anchors.txt', IMAGE_H, IMAGE_W) CKPT_FILE = "./checkpoint/yolov3.ckpt-2500" IOU_THRESH = 0.5 SCORE_THRESH = 0.3 all_detections = [] all_annotations = [] all_aver_precs = {CLASSES[i]:0. for i in range(NUM_CLASSES)} test_tfrecord = "./raccoon_dataset/raccoon_*.tfrecords" parser = Parser(IMAGE_H, IMAGE_W, ANCHORS, NUM_CLASSES) testset = dataset(parser, test_tfrecord , batch_size=1, shuffle=None, repeat=False) images_tensor, *y_true_tensor = testset.get_next() model = yolov3.yolov3(NUM_CLASSES, ANCHORS) with tf.variable_scope('yolov3'): pred_feature_map = model.forward(images_tensor, is_training=False) y_pred_tensor = model.predict(pred_feature_map) saver = tf.train.Saver() saver.restore(sess, CKPT_FILE) try: image_idx = 0 while True: y_pred, y_true, image = sess.run([y_pred_tensor, y_true_tensor, images_tensor]) pred_boxes = y_pred[0][0] pred_confs = y_pred[1][0] pred_probs = y_pred[2][0] image = Image.fromarray(np.uint8(image[0]*255)) true_labels_list, true_boxes_list = [], [] for i in range(3): true_probs_temp = y_true[i][..., 5: ] true_boxes_temp = y_true[i][..., 0:4] object_mask = true_probs_temp.sum(axis=-1) > 0 true_probs_temp = true_probs_temp[object_mask] true_boxes_temp = true_boxes_temp[object_mask] true_labels_list += np.argmax(true_probs_temp, axis=-1).tolist() true_boxes_list += true_boxes_temp.tolist() pred_boxes, pred_scores, pred_labels = utils.cpu_nms(pred_boxes, pred_confs*pred_probs, NUM_CLASSES, score_thresh=SCORE_THRESH, iou_thresh=IOU_THRESH) # image = utils.draw_boxes(image, pred_boxes, pred_scores, pred_labels, CLASSES, [IMAGE_H, IMAGE_W], show=True) true_boxes = np.array(true_boxes_list) box_centers, box_sizes = true_boxes[:,0:2], true_boxes[:,2:4] true_boxes[:,0:2] = box_centers - box_sizes / 2. true_boxes[:,2:4] = true_boxes[:,0:2] + box_sizes pred_labels_list = [] if pred_labels is None else pred_labels.tolist() all_detections.append( [pred_boxes, pred_scores, pred_labels_list]) all_annotations.append([true_boxes, true_labels_list]) image_idx += 1 if image_idx % 100 == 0: sys.stdout.write(".") sys.stdout.flush() except tf.errors.OutOfRangeError: pass for idx in range(NUM_CLASSES): true_positives = [] scores = [] num_annotations = 0 for i in tqdm(range(len(all_annotations)), desc="Computing AP for class %12s" %(CLASSES[idx])): pred_boxes, pred_scores, pred_labels_list = all_detections[i] true_boxes, true_labels_list = all_annotations[i] detected = [] num_annotations += true_labels_list.count(idx) for k in range(len(pred_labels_list)): if pred_labels_list[k] != idx: continue scores.append(pred_scores[k]) ious = utils.bbox_iou(pred_boxes[k:k+1], true_boxes) m = np.argmax(ious) if ious[m] > IOU_THRESH and pred_labels_list[k] == true_labels_list[m] and m not in detected: detected.append(m) true_positives.append(1) else: true_positives.append(0) num_predictions = len(true_positives) true_positives = np.array(true_positives) false_positives = np.ones_like(true_positives) - true_positives # sorted by score indices = np.argsort(-np.array(scores)) false_positives = false_positives[indices] true_positives = true_positives[indices] # compute false positives and true positives false_positives = np.cumsum(false_positives) true_positives = np.cumsum(true_positives) # compute recall and precision recall = true_positives / np.maximum(num_annotations, np.finfo(np.float64).eps) precision = true_positives / np.maximum(num_predictions, np.finfo(np.float64).eps) # compute average precision average_precision = utils.compute_ap(recall, precision) all_aver_precs[CLASSES[idx]] = average_precision for idx in range(NUM_CLASSES): cls_name = CLASSES[idx] print("=> Class %10s - AP: %.4f" %(cls_name, all_aver_precs[cls_name])) print("=> mAP: %.4f" %(sum(all_aver_precs.values()) / NUM_CLASSES))
|------yolov3.py # 使用训练好的模型推理
import numpy as np import tensorflow as tf from PIL import Image from core import utils IMAGE_H, IMAGE_W = 416, 416 classes = utils.read_coco_names('./data/raccoon.names') num_classes = len(classes) image_path = "./raccoon_dataset/images/raccoon-182.jpg" # 181, img = Image.open(image_path) img_resized = np.array(img.resize(size=(IMAGE_W, IMAGE_H)), dtype=np.float32) img_resized = img_resized / 255. cpu_nms_graph = tf.Graph() input_tensor, output_tensors = utils.read_pb_return_tensors(cpu_nms_graph, "./checkpoint/yolov3_cpu_nms.pb", ["Placeholder:0", "concat_9:0", "mul_6:0"]) with tf.Session(graph=cpu_nms_graph) as sess: boxes, scores = sess.run(output_tensors, feed_dict={input_tensor: np.expand_dims(img_resized, axis=0)}) boxes, scores, labels = utils.cpu_nms(boxes, scores, num_classes, score_thresh=0.3, iou_thresh=0.5) image = utils.draw_boxes(img, boxes, scores, labels, classes, [IMAGE_H, IMAGE_W], show=True)
|------show_input_image.py #显示输入图片及BBOX
import cv2 import numpy as np import tensorflow as tf from core import utils from PIL import Image from core.dataset import Parser, dataset sess = tf.Session() IMAGE_H, IMAGE_W = 416, 416 BATCH_SIZE = 1 SHUFFLE_SIZE = 1 train_tfrecord = "./raccoon_dataset/raccoon_*.tfrecords" anchors = utils.get_anchors('./data/raccoon_anchors.txt', IMAGE_H, IMAGE_W) classes = utils.read_coco_names('./data/raccoon.names') num_classes = len(classes) parser = Parser(IMAGE_H, IMAGE_W, anchors, num_classes, debug=True) trainset = dataset(parser, train_tfrecord, BATCH_SIZE, shuffle=SHUFFLE_SIZE) is_training = tf.placeholder(tf.bool) example = trainset.get_next() for l in range(10): image, boxes = sess.run(example) image, boxes = image[0], boxes[0] n_box = len(boxes) for i in range(n_box): image = cv2.rectangle(image,(int(float(boxes[i][0])), int(float(boxes[i][1]))), (int(float(boxes[i][2])), int(float(boxes[i][3]))), (255,0,0), 1) label = classes[boxes[i][4]] image = cv2.putText(image, label, (int(float(boxes[i][0])),int(float(boxes[i][1]))), cv2.FONT_HERSHEY_SIMPLEX, .6, (0, 255, 0), 1, 2) image = Image.fromarray(np.uint8(image)) image.show()
|------kmeans.py #计算输入数据中anchors的数据
import cv2 import argparse import numpy as np import seaborn as sns import matplotlib.pyplot as plt current_palette = list(sns.xkcd_rgb.values()) def iou(box, clusters): """ Calculates the Intersection over Union (IoU) between a box and k clusters. param: box: tuple or array, shifted to the origin (i. e. width and height) clusters: numpy array of shape (k, 2) where k is the number of clusters return: numpy array of shape (k, 0) where k is the number of clusters """ x = np.minimum(clusters[:, 0], box[0]) y = np.minimum(clusters[:, 1], box[1]) if np.count_nonzero(x == 0) > 0 or np.count_nonzero(y == 0) > 0: raise ValueError("Box has no area") intersection = x * y box_area = box[0] * box[1] cluster_area = clusters[:, 0] * clusters[:, 1] iou_ = intersection / (box_area + cluster_area - intersection) return iou_ def kmeans(boxes, k, dist=np.median,seed=1): """ Calculates k-means clustering with the Intersection over Union (IoU) metric. :param boxes: numpy array of shape (r, 2), where r is the number of rows :param k: number of clusters :param dist: distance function :return: numpy array of shape (k, 2) """ rows = boxes.shape[0] distances = np.empty((rows, k)) ## N row x N cluster last_clusters = np.zeros((rows,)) np.random.seed(seed) # initialize the cluster centers to be k items clusters = boxes[np.random.choice(rows, k, replace=False)] while True: # Step 1: allocate each item to the closest cluster centers for icluster in range(k): # I made change to lars76's code here to make the code faster distances[:,icluster] = 1 - iou(clusters[icluster], boxes) nearest_clusters = np.argmin(distances, axis=1) if (last_clusters == nearest_clusters).all(): break # Step 2: calculate the cluster centers as mean (or median) of all the cases in the clusters. for cluster in range(k): clusters[cluster] = dist(boxes[nearest_clusters == cluster], axis=0) last_clusters = nearest_clusters return clusters, nearest_clusters, distances def parse_anno(annotation_path): anno = open(annotation_path, 'r') result = [] for line in anno: s = line.strip().split(' ') image = cv2.imread(s[0]) image_h, image_w = image.shape[:2] s = s[1:] box_cnt = len(s) // 5 for i in range(box_cnt): x_min, y_min, x_max, y_max = float(s[i*5+0]), float(s[i*5+1]), float(s[i*5+2]), float(s[i*5+3]) width = (x_max - x_min) / image_w height = (y_max - y_min) / image_h result.append([width, height]) result = np.asarray(result) return result def plot_cluster_result(clusters,nearest_clusters,WithinClusterSumDist,wh,k): for icluster in np.unique(nearest_clusters): pick = nearest_clusters==icluster c = current_palette[icluster] plt.rc('font', size=8) plt.plot(wh[pick,0],wh[pick,1],"p", color=c, alpha=0.5,label="cluster = {}, N = {:6.0f}".format(icluster,np.sum(pick))) plt.text(clusters[icluster,0], clusters[icluster,1], "c{}".format(icluster), fontsize=20,color="red") plt.title("Clusters=%d" %k) plt.xlabel("width") plt.ylabel("height") plt.legend(title="Mean IoU = {:5.4f}".format(WithinClusterSumDist)) plt.tight_layout() plt.savefig("./kmeans.jpg") plt.show() if __name__ == '__main__': parser = argparse.ArgumentParser() parser.add_argument("--dataset_txt", type=str, default="./raccoon_dataset/train.txt") parser.add_argument("--anchors_txt", type=str, default="./data/raccoon_anchors.txt") parser.add_argument("--cluster_num", type=int, default=9) args = parser.parse_args() anno_result = parse_anno(args.dataset_txt) clusters, nearest_clusters, distances = kmeans(anno_result, args.cluster_num) # sorted by area area = clusters[:, 0] * clusters[:, 1] indice = np.argsort(area) clusters = clusters[indice] with open(args.anchors_txt, "w") as f: for i in range(args.cluster_num): width, height = clusters[i] f.writelines(str(width) + " " + str(height) + " ") WithinClusterMeanDist = np.mean(distances[np.arange(distances.shape[0]),nearest_clusters]) plot_cluster_result(clusters, nearest_clusters, 1-WithinClusterMeanDist, anno_result, args.cluster_num)
|------test_video.py #视频方式测试模型效果
import cv2 import time import numpy as np import tensorflow as tf from PIL import Image from core import utils IMAGE_H, IMAGE_W = 416, 416 video_path = "./data/demo_data/road.mp4" video_path = 0 # use camera classes = utils.read_coco_names('./data/coco.names') num_classes = len(classes) input_tensor, output_tensors = utils.read_pb_return_tensors(tf.get_default_graph(), "./checkpoint/yolov3_cpu_nms.pb", ["Placeholder:0", "concat_9:0", "mul_6:0"]) with tf.Session() as sess: vid = cv2.VideoCapture(video_path) while True: return_value, frame = vid.read() if return_value: frame = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB) image = Image.fromarray(frame) else: raise ValueError("No image!") img_resized = np.array(image.resize(size=(IMAGE_H, IMAGE_W)), dtype=np.float32) img_resized = img_resized / 255. prev_time = time.time() boxes, scores = sess.run(output_tensors, feed_dict={input_tensor: np.expand_dims(img_resized, axis=0)}) boxes, scores, labels = utils.cpu_nms(boxes, scores, num_classes, score_thresh=0.4, iou_thresh=0.5) image = utils.draw_boxes(image, boxes, scores, labels, classes, (IMAGE_H, IMAGE_W), show=False) curr_time = time.time() exec_time = curr_time - prev_time result = np.asarray(image) info = "time: %.2f ms" %(1000*exec_time) cv2.putText(result, text=info, org=(50, 70), fontFace=cv2.FONT_HERSHEY_SIMPLEX, fontScale=1, color=(255, 0, 0), thickness=2) cv2.namedWindow("result", cv2.WINDOW_AUTOSIZE) result = cv2.cvtColor(result, cv2.COLOR_RGB2BGR) cv2.imshow("result", result) if cv2.waitKey(1) & 0xFF == ord('q'): break
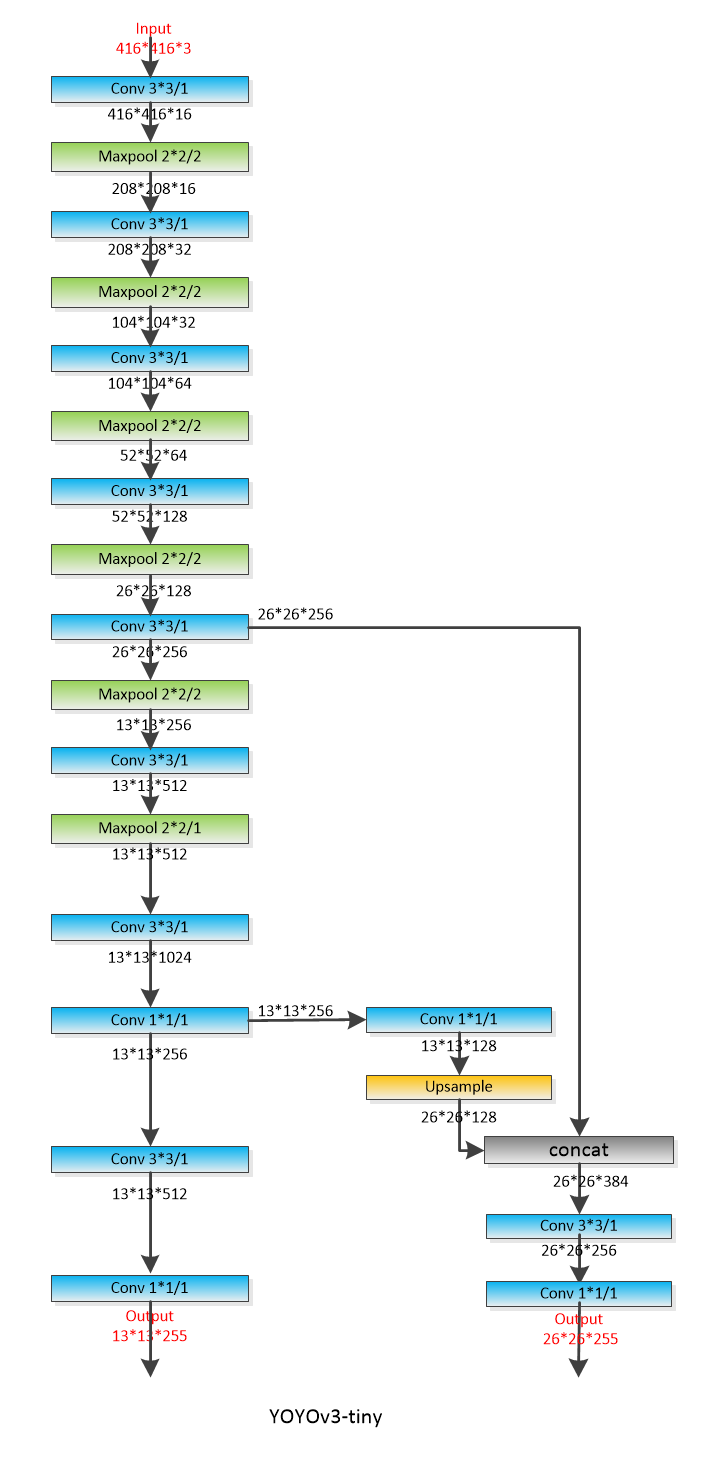
三、 Yolov3-tiny
由于YOLOV3的模型过于庞大,无法用于ARM芯片。所以,这里使用了Yolov3-tiny。
配置文件修改:
首先,我们需要对yolov3-tiny.cfg进行编辑,
在这个文件里,我们需要关注[yolo]和[yolo]前的一个[convolutional]
首先将所有[yolo]里面classes修改为需要识别的类别数
得到classes=4
classes的含义是有多少种需要被识别的物体,这里我训练yolo识别4种物体,所以设置为4
对所有[yolo]的前一个[convolutional]中的filters进行修改
其取值为filters = 3 * ( classes + 5 ),由于上一步中classes=4所以这里filters取27
到这里,yolov3-tiny.cfg就修改完毕了
然后是修改model_data中的car_classes.txt,将待检测物体的标签填写进去,每种标签占一行。

【推荐】还在用 ECharts 开发大屏?试试这款永久免费的开源 BI 工具!
【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步