

STM32之CAN
概述:STM32有3个发送邮箱,发送调度器根据优先级决定先发送那个,相当于有3个发送帧FIFO;接收方面有14个过滤器,通过编程可以从CAN的接收引脚中选择需要的报文然后分别给2个接收帧FIFO(每个可以有3个完整报文,等于分2组,共6个接收帧缓冲)。
IO设置:CAN_RX:输入上拉;CAN_TX:AF_PP复用推挽输出。
时钟设置:对应的GPIO时钟、AFIO时钟、CAN时钟(APB1)
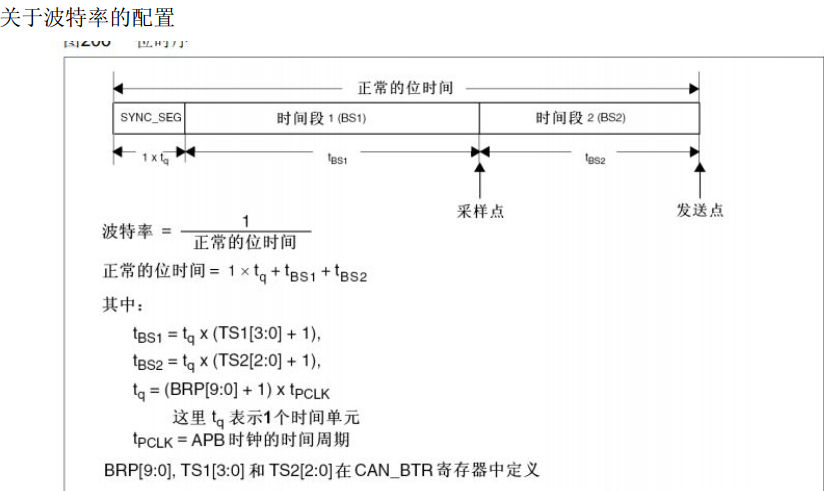
一 CAN的波特率:CAN1是挂在APB1上的(36MHZ),那么以下波特率=APB1/(1+3+5)/8=500K,

 二 其它的CAN设置常规,设置NVIC中断编写CAN1_RX0_ISR()接收中断。发送函数
二 其它的CAN设置常规,设置NVIC中断编写CAN1_RX0_ISR()接收中断。发送函数
void User_CANTransmit(uint16_t val){
CanTxMsg TxMessage; /* 定义CAN报文结构体 */
uint8_t TransmitMailbox;
TxMessage.StdId=val&0x7FF; /* 动态填充帧ID,防止碰撞 */
TxMessage.RTR=CAN_RTR_DATA; /* 数据帧 */
TxMessage.IDE=CAN_ID_STD; /* 标准帧 */
TxMessage.DLC=2; /* 数据场长度 */
TxMessage.Data[0]=val; /* 填充数据场 */
TxMessage.Data[1]=(val>>8); /* 填充数据场 */
TransmitMailbox=CAN_Transmit(CAN1,&TxMessage); /* 发送并获取邮箱号 */
while((CAN_TransmitStatus(CAN1,TransmitMailbox) != CANTXOK)); /* 等待发送完成 */
}
三 发送和接收的BUG在#include "stm32f10x_can.h"已经定义了专门的结构体CanRxMsg、CanTxMsg


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?
2017-07-06 宏 函数 内联函数inline