

电机学习
单相:火线与零线线间电压220V
三相(220/380V):A,B,C三相火线与零线,线间电压(220V/380V),单相对比110/190V
电机的接法:
Y型:
三角形:
星型:
一 分类:
- 直流电机:电压升高转速增加;正负反向则电机旋转方向相反;常见L298N双H桥驱动芯片。
- 直流有刷:Pin =U*I;Pout =U*I*η;
- 直流无刷
- 交流电机
- 单相交流感应:Pin=U*I*Cosφ;Pout =U*I*η*Cosφ;其中Cosφ表示功率因数;U和I分别是有效值。
- 三相交流感应:Pin =(√3)U*I*Cosφ;Pout =(√3)U*I*η*Cosφ;其中Cosφ表示功率因数;U和I分别是有效值。实时功率有负载决定。
对于转动力矩的电动机:P=T*n/9550*η(P功率单位KW、T转矩单位N、n转速单位R/min)。
用于直线运行的电动机:P=F*V/102*η(F力单位N、V速度单位m/s)
提升机、升降机的功率计算:P=Q*q•ΔH/102ΔH(Q单位时间内输送的质量kg/s、ΔH负荷输送的高度)
水泵电机计算:P=QH/6.12η(P电机功率KW、Q水泵流量m³/min、H扬程m)
步进电机功率计算:P=2πnM/60(P电机功率W、n转速R/min、M力矩N·M)
当然在电机运行过程中我们一般对电流和电压的监测是更为容易一些,但在负载率不一样时功率因数也不一样,只能通过近似特性来估算
- 三相同步电机:
- 步进电机
步进电机:将脉冲变成角位移(脉冲角:每多少个脉冲旋转多少度).角位移取决于脉冲的个数,电机的转速和加速度取决于脉冲的频率.步进电机没有误差累积.
单片机控制方法:
a: 先根据控制角度计算脉冲角个数。
b:单片机3个输出引脚A,B,C,D,按照A->AB->B->BC->C->CD->D->DA的8个节拍分别控制对应4个IO的通断。如果反向则节拍step=8-curstep;
C:设置一个定时器(频率决定速度和加速度),在里面根据方向,不短递减脉冲个数和控制curstep(按8的周期轮回)



#include "Motor.h" //电机旋转的方向 int direction = 0 ; //电机旋转的脉冲个数 uint16_t Motor_Pulse = 0 ; //电机控制,采用8节拍来做 //A->AB->B->BC->C->CD->D->DA void MOTOR_CONTROLD(uint8_t step, uint8_t direction) { uint8_t __step = step ; //判断电机的旋转方向,如果为1,则逆向旋转 if(1 == direction) __step = 8 - step ; switch(__step) { //A case 0: MOTOR_A_ON; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_OFF; break ; //AB case 1: MOTOR_A_ON; MOTOR_B_ON; MOTOR_C_OFF; MOTOR_D_OFF; break ; //B case 2: MOTOR_A_OFF; MOTOR_B_ON; MOTOR_C_OFF; MOTOR_D_OFF; break ; //BC case 3: MOTOR_A_OFF; MOTOR_B_ON; MOTOR_C_ON; MOTOR_D_OFF; break ; //C case 4: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_ON; MOTOR_D_OFF; break ; //CD case 5: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_ON; MOTOR_D_ON; break ; //D case 6: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_ON; //DA case 7: MOTOR_A_ON; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_ON; break ; } } //关闭电机 void CLOSE_MOTOR(void) { HAL_GPIO_WritePin(GPIOA, MOTOR_A_Pin | MOTOR_B_Pin | MOTOR_C_Pin | MOTOR_D_Pin, GPIO_PIN_RESET); } /* Rotation_Angle:旋转角度 返回:Motor_Pulse 根据公式计算得出的脉冲个数 */ int Motor_Angle_Cal(int Rotation_Angle) { if(Rotation_Angle < 0 || Rotation_Angle > 360) return -1 ; Motor_Pulse = (int)((double)(Rotation_Angle / 5.625) * 64) ; return Motor_Pulse ; } #include "Motor.h" //电机旋转的方向 int direction = 0 ; //电机旋转的脉冲个数 uint16_t Motor_Pulse = 0 ; //电机控制,采用8节拍来做 //A->AB->B->BC->C->CD->D->DA void MOTOR_CONTROLD(uint8_t step, uint8_t direction) { uint8_t __step = step ; //判断电机的旋转方向,如果为1,则逆向旋转 if(1 == direction) __step = 8 - step ; switch(__step) { //A case 0: MOTOR_A_ON; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_OFF; break ; //AB case 1: MOTOR_A_ON; MOTOR_B_ON; MOTOR_C_OFF; MOTOR_D_OFF; break ; //B case 2: MOTOR_A_OFF; MOTOR_B_ON; MOTOR_C_OFF; MOTOR_D_OFF; break ; //BC case 3: MOTOR_A_OFF; MOTOR_B_ON; MOTOR_C_ON; MOTOR_D_OFF; break ; //C case 4: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_ON; MOTOR_D_OFF; break ; //CD case 5: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_ON; MOTOR_D_ON; break ; //D case 6: MOTOR_A_OFF; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_ON; //DA case 7: MOTOR_A_ON; MOTOR_B_OFF; MOTOR_C_OFF; MOTOR_D_ON; break ; } } //关闭电机 void CLOSE_MOTOR(void) { HAL_GPIO_WritePin(GPIOA, MOTOR_A_Pin | MOTOR_B_Pin | MOTOR_C_Pin | MOTOR_D_Pin, GPIO_PIN_RESET); } /* Rotation_Angle:旋转角度 返回:Motor_Pulse 根据公式计算得出的脉冲个数 */ int Motor_Angle_Cal(int Rotation_Angle) { if(Rotation_Angle < 0 || Rotation_Angle > 360) return -1 ; Motor_Pulse = (int)((double)(Rotation_Angle / 5.625) * 64) ; return Motor_Pulse ; }
电机的状态检测:缺相:启动过程缺相(绕组电流为额定4~7倍,温升16~49倍)则不能启动;运行中缺相则电流超过正常值(1.732倍),电机因过热而烧毁。加缺相保护器。欠电流或过电流继电器保护
- 电流检测:负载运行电流必须小于铭牌上的额定电流,;当三相电流的不平衡的差值小于10%(缺相),应理解做停机处理;机械故障会引起气隙变化,通过电流信号反应出来,将测量电流和数学模型所得电流进行差分比较得到的一组数值经过傅立叶分析得到功率密度图,对照不通故障的图形特点就可区分不通类型的故障,从而进行预防性检修的MCM监测方法
- 电压检测:电源电压过高或过低及三相电压不平衡(相间电压差超过5%,有短路,接地或接触不良)会引起故障。运行电压<1.1*V额,电源电压波动有的是±15%;任意相间电压差值<0.5*V额
- 电阻测试:用万用表的电阻档测线路和触头的电阻,注意避免在带电的环境下进行防止危险发生。
- 温度检测:手触摸法(确保不漏电),滴水实验法(有咝咝”声),饶子中的热敏电阻判断是否过载。
- 轴承(传动皮带过紧,缺润滑油),不正常的震动,声音和气味(绕组温度过高)。
根据电压电流确定电机的待机/空载/带负载运行状态:
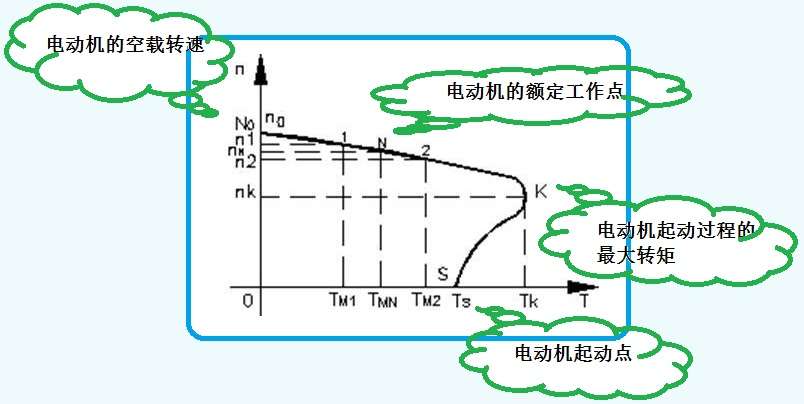
- 电动机的转速、转矩的机械特性:电机在额定工作点具有自动稳定转速的功能:当负载转矩也即阻转矩加大时,电机转速下降,但电机绕组切割磁力线的数量增多,于是电机电流加大,电机转速上升返回到额定工作点;反之,若阻转矩减少,电机转速上升,则因为电机绕组切割磁力线数量减少,电机电流下降,电机转速下降返回到额定工作点。
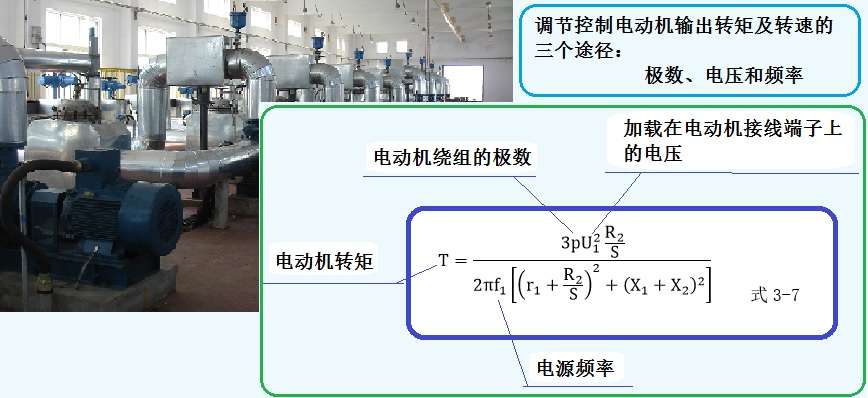
电机的调速:
- 变极调速:极对数P,例如双速电机调速;
- 变电压调速:调整电机所加载的电压U,一般用于电机的起动过程,例如软起动器、星三角起动、自耦变压器起动等
- 变频调速:调整电源频率f,变频器调速时也需要调整电压,并且让频率与电压之比保持一定的关系
电机的运行参数:电网电压,运行电流,电源频率,绕组温度。引申【非侵入式负荷监测】
电机状态类型:断相,三相不平衡,空载/轻载/过载,欠压,接地不平衡。
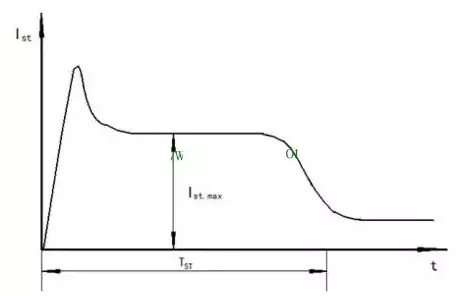
电机启动过程曲线:
三相鼠笼异步电机的启动电流一般是4~7倍,但是不是绝对的。不过一般要求电机的起动电流不能超过其额定电流的2~5倍。电机功率超过30kw的电动机不适合频繁启动,因为30kw以上电机启动电流一般为额定电流的6-7倍,频繁启动会增加电机温升,造成烧毁电机的可能。
减小启动电流的措施:直接启动(适用于1W以下的电机),串电阻启动,自藕变压器启动,星三角减压启动,变频器启动(软启动)

粗略计算,可以用下列公式估算电动机的最长起动时间
式中 Pe ---电动机的额定功率,单位为kW。Tmax---电动机最长起动时间,单位为秒。直接启动的一般般是5-7秒,大型电动机启动时间有十几秒;和电机功率及电机承受的负载有关,还和启动方式有关,大功率电动机Y-△启动几分钟都正常。
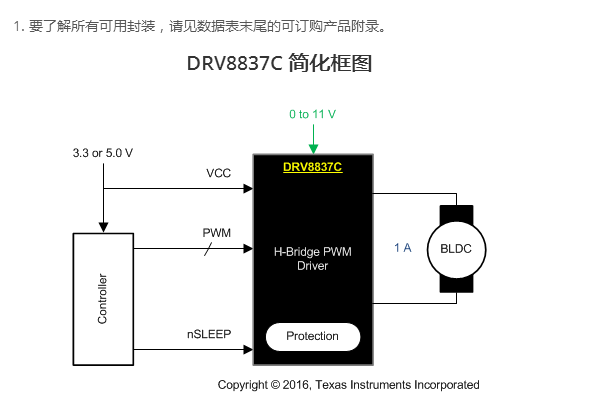
驱动芯片:


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?