

PID学习
PID:
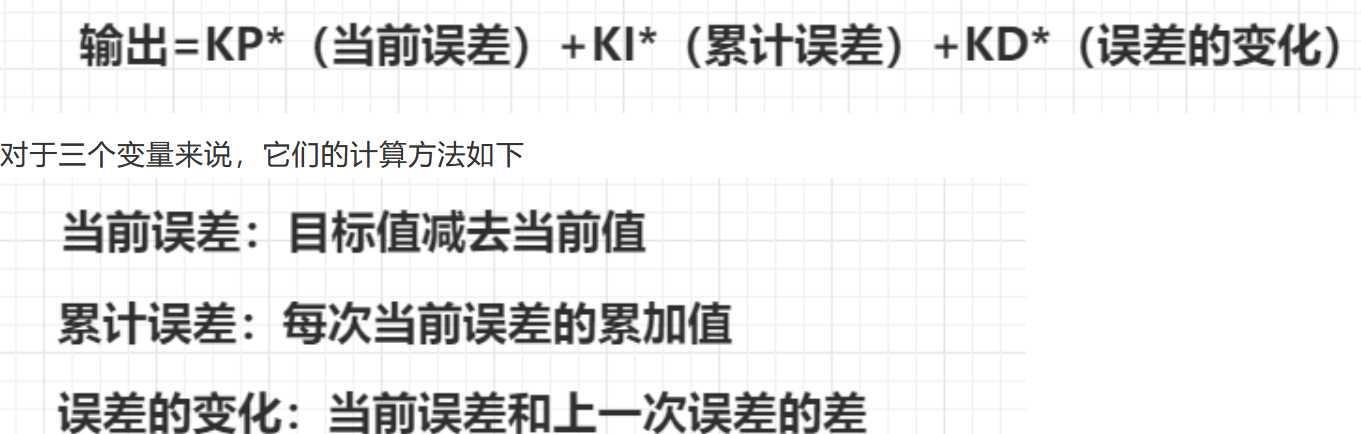
1 比例:最快,但由于稳态误差(增加和消耗相等永远达不到目标的现象)存在达不到目标,同时比例过大会出现震荡
2 积分:为了消除比例环节中的稳态误差
3 微分:为了消除比例环节中的震荡,提前介入,在接近目标时减小反馈防止过充。
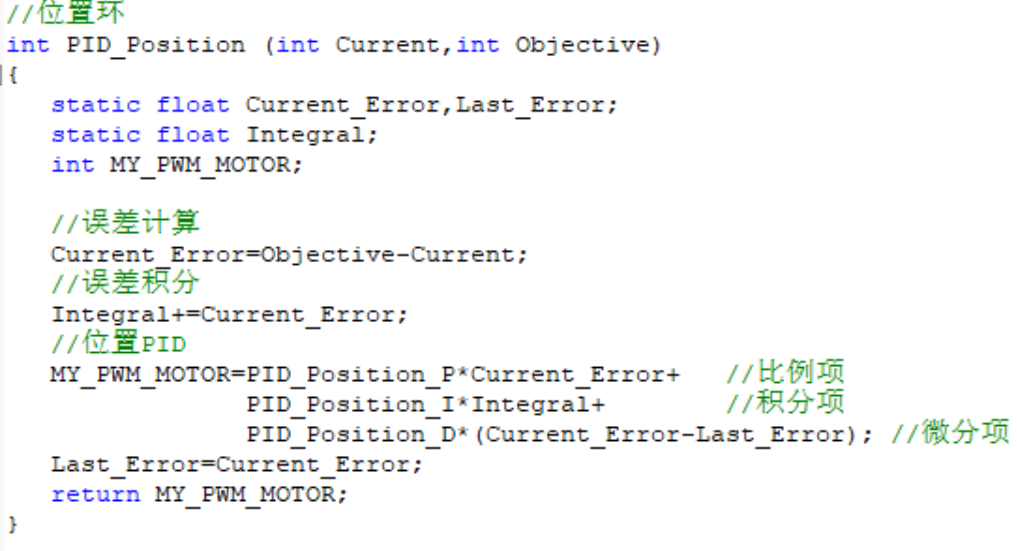
位置式PID单片机系统:学习参考
先让Kp=100,Ki=Kd=0,此时电机晃动且响应慢;
增大Kp直到在目标位置晃动(此时响应也变块了)式,增大Kd直到晃动有较大改善;
重复几圈后出现累计误差不能回到原点,此时增加Ki(一般很小,比如0.01)。
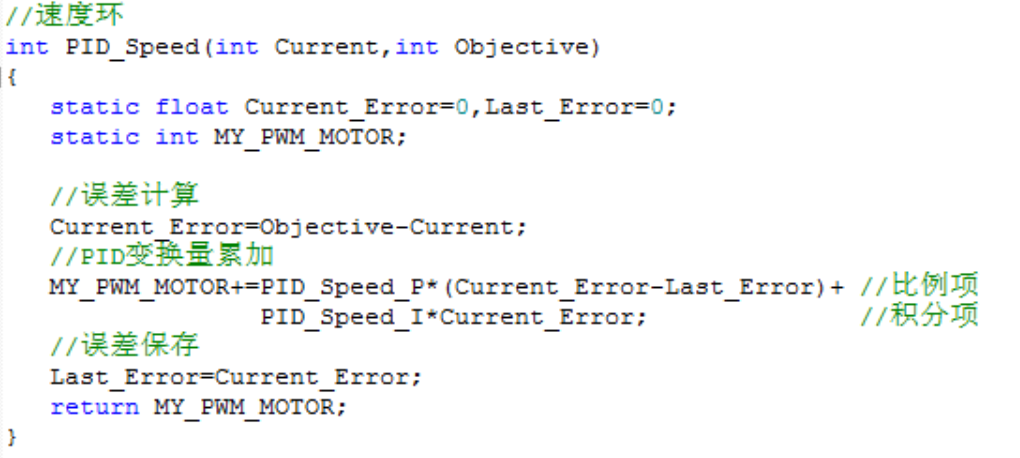
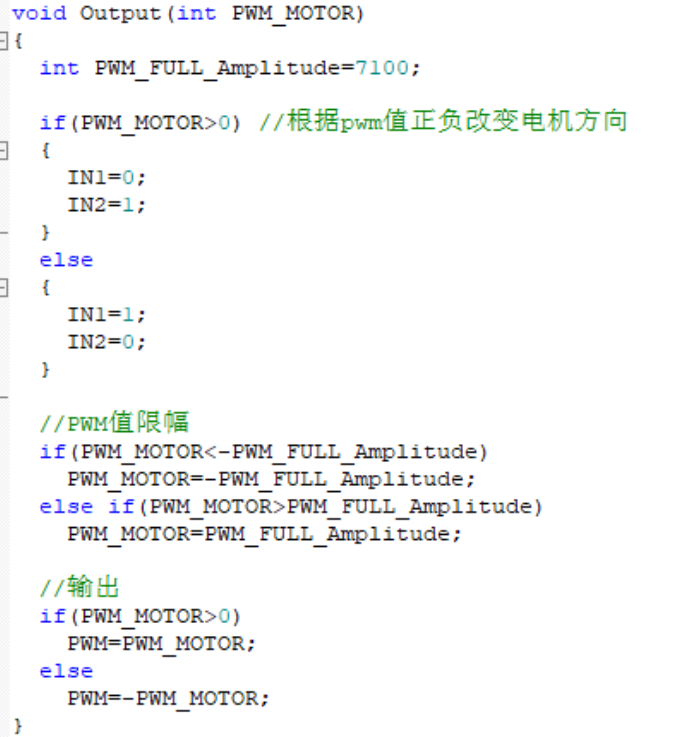
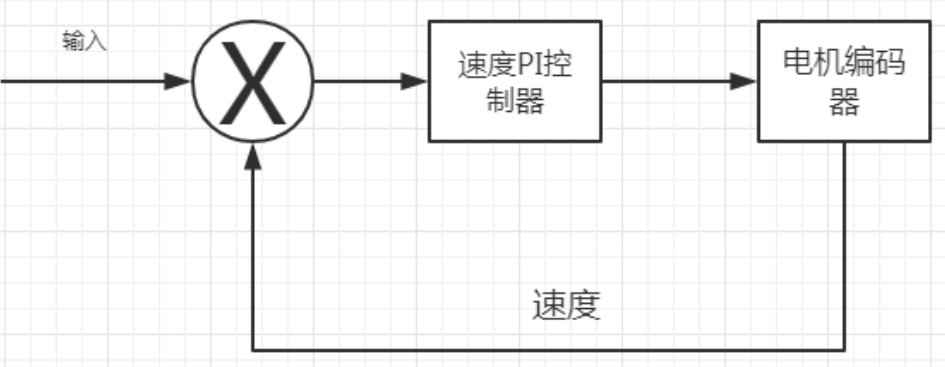
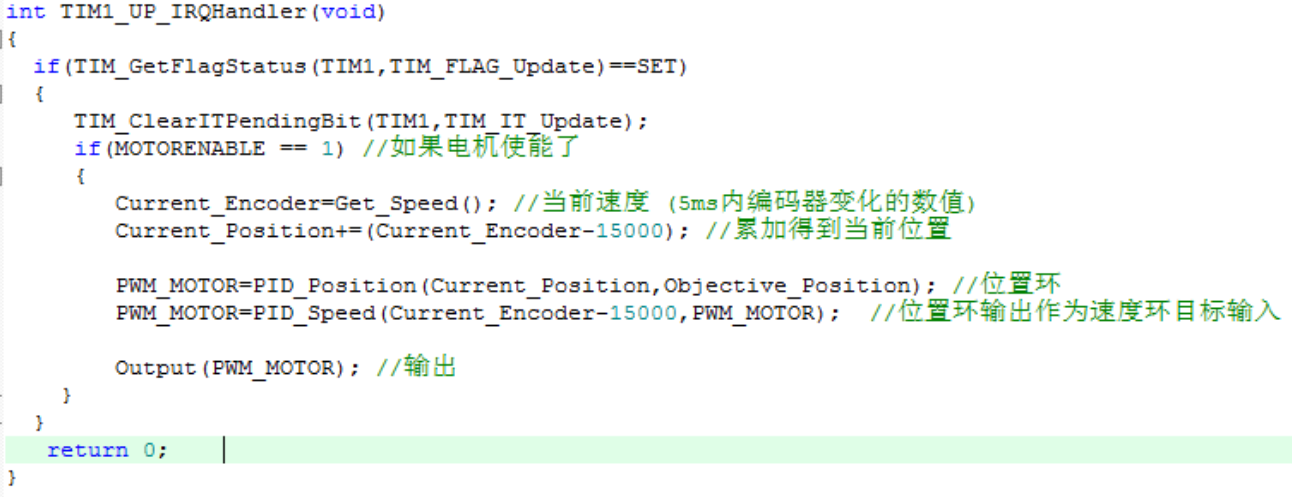
定时器每隔5ms中断。在其中通过编码器获得当前位置,控制位置算法得到目标值,然后再用速度环修正,最后调用output给电机进行控制。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?
2014-07-22 电感和磁珠与0欧姆电阻
2014-07-22 学习-热敏电阻