ROS rqt、rviz的使用
2022-01-28 22:28 jym蒟蒻 阅读(1235) 评论(0) 收藏 举报首先机器人端启动摄像头。
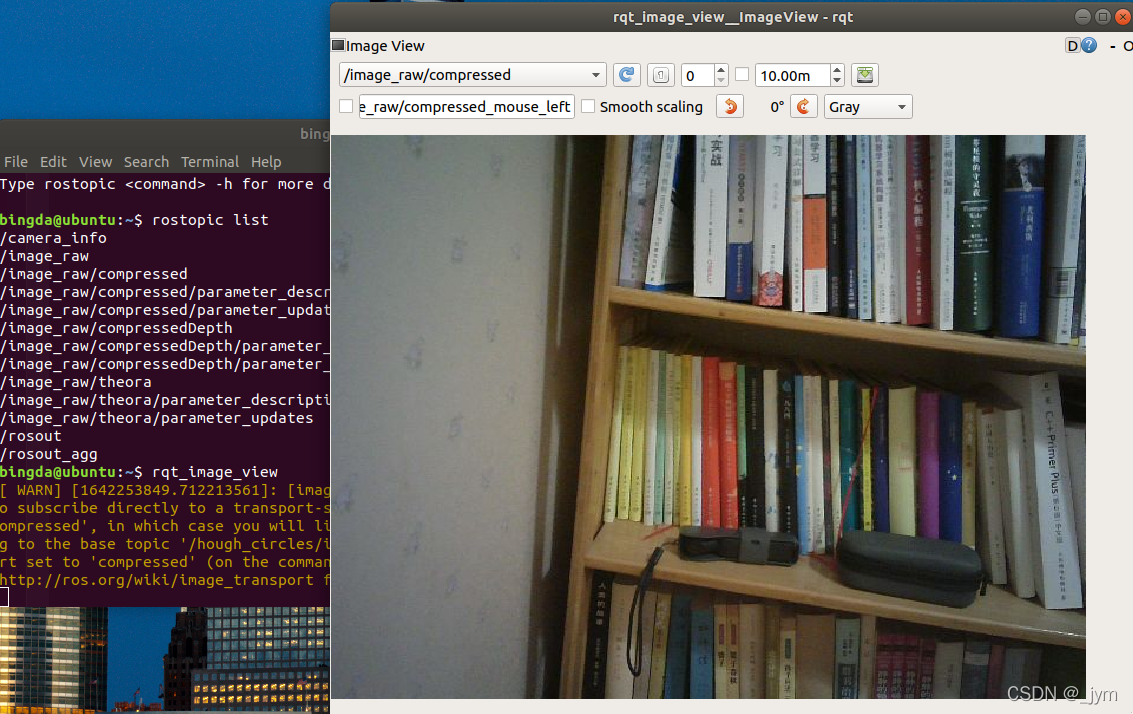
pc端用rqt_image_view就可以打开rqt工具,然后选择话题,就看到摄像头图像了。
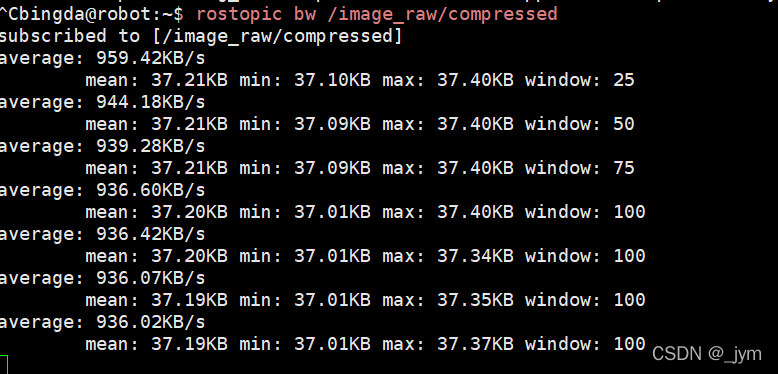
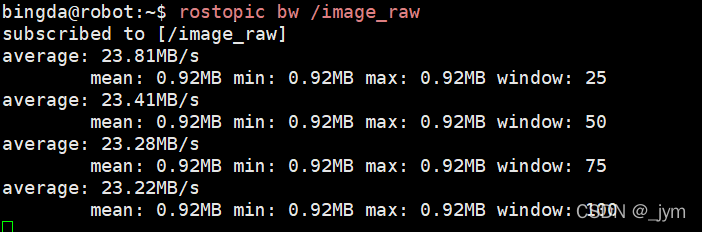
下面是compressed话题和不是compressed话题的对比,这两个话题带宽有倍数级差异。
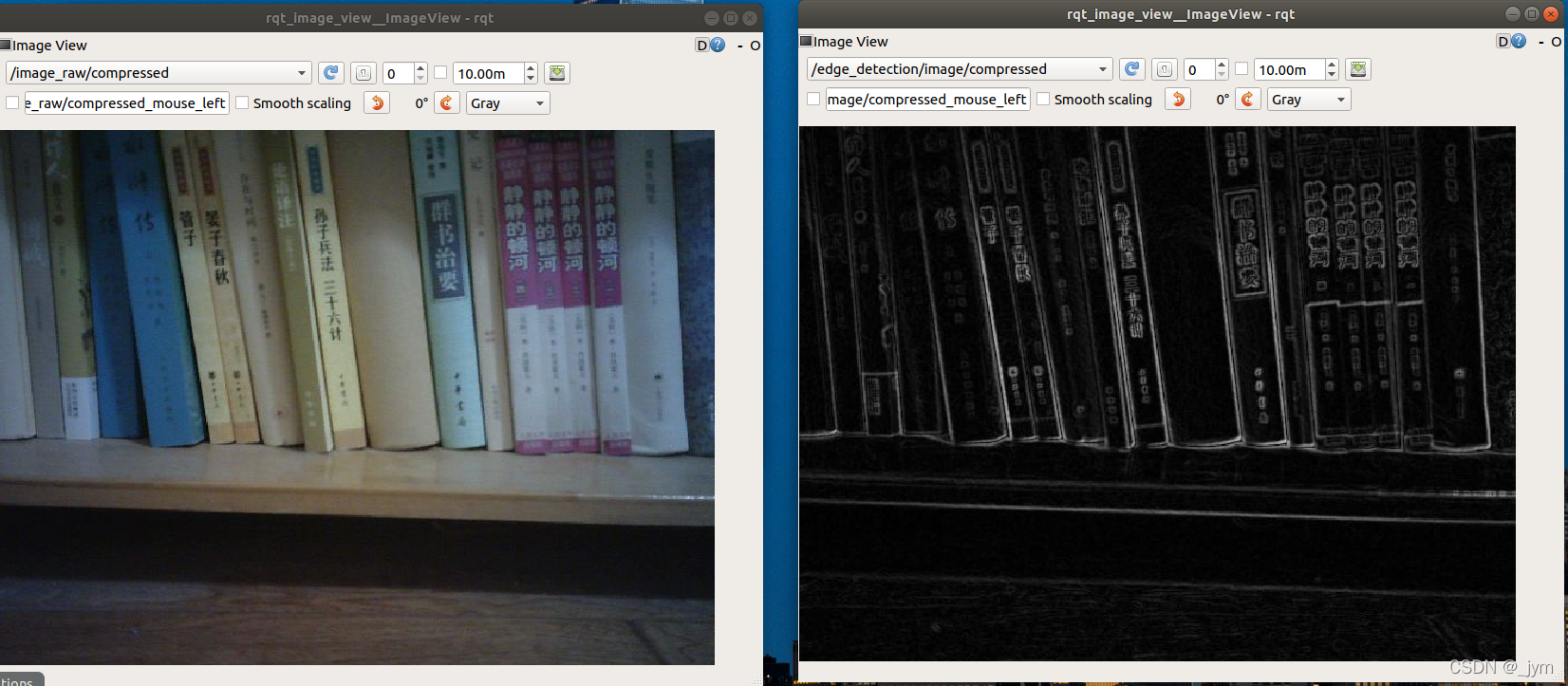
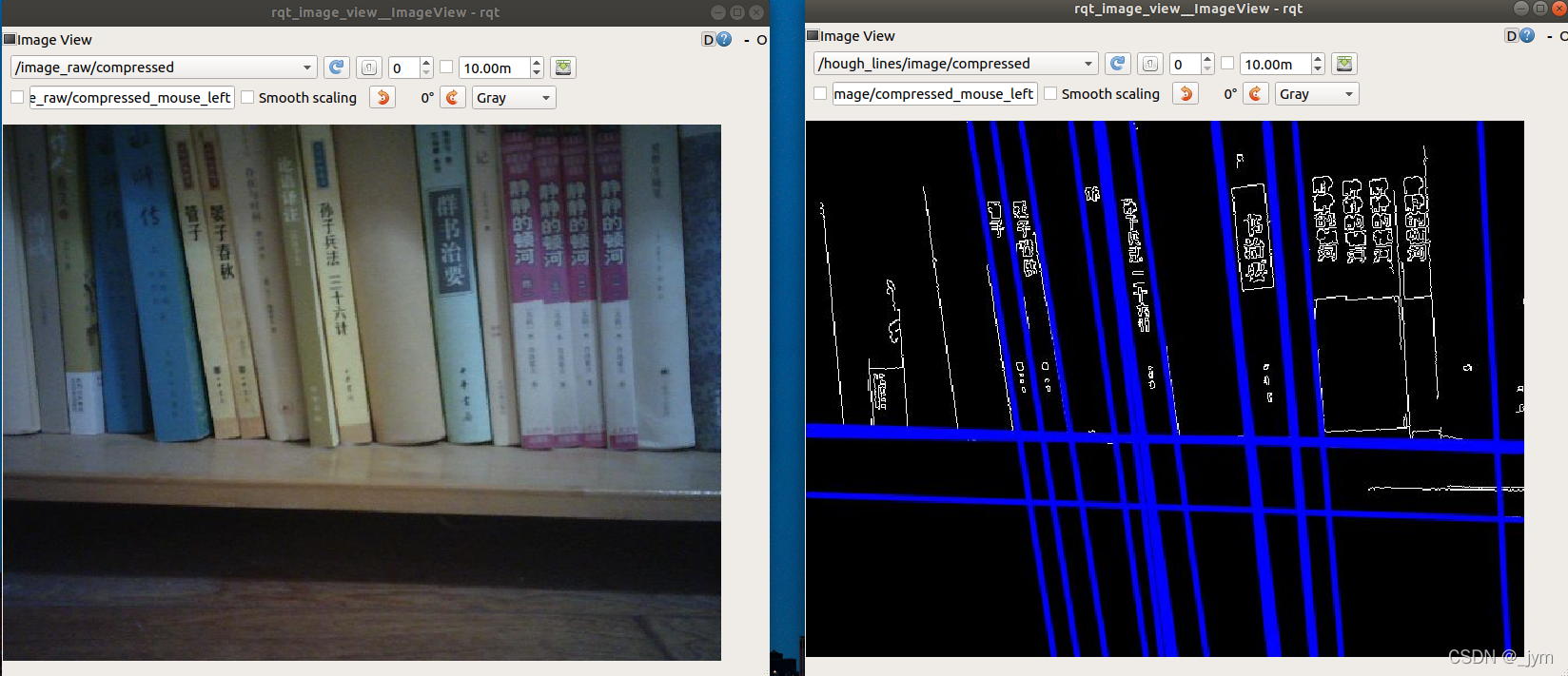
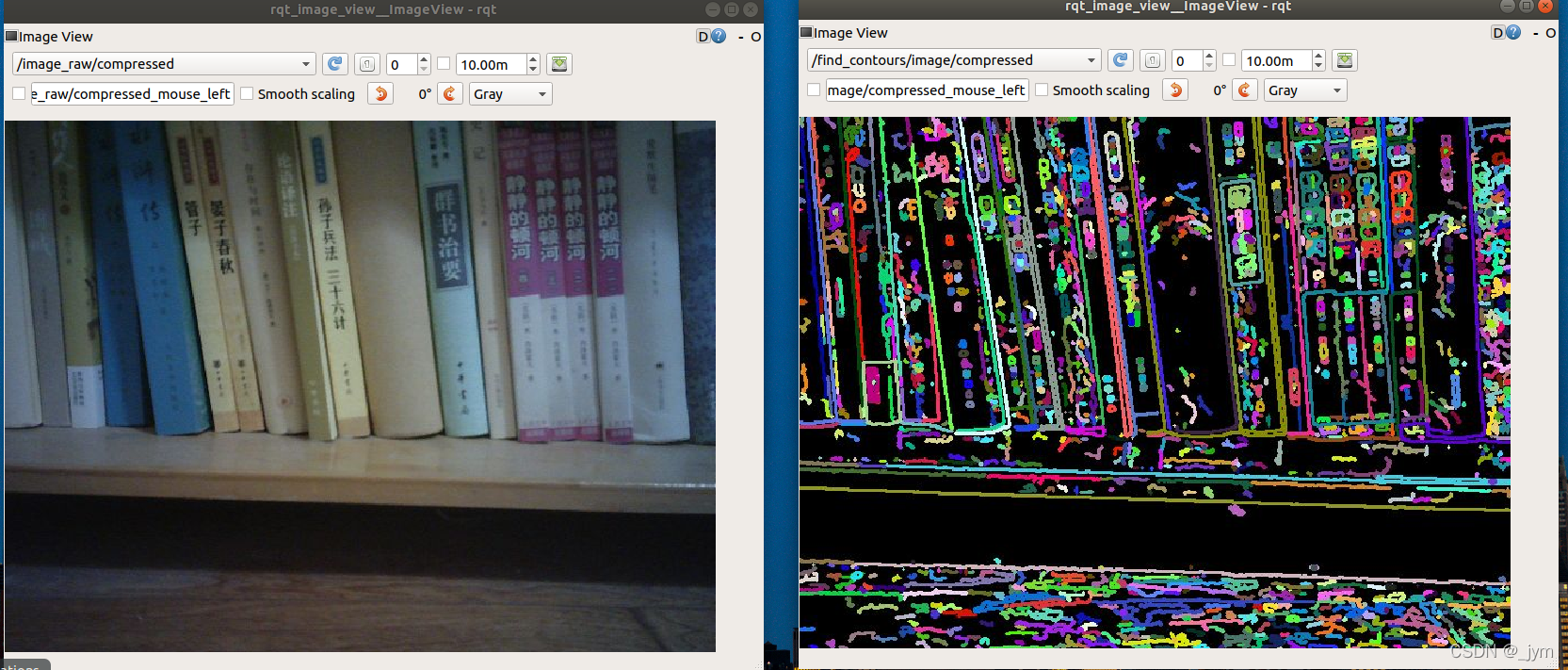
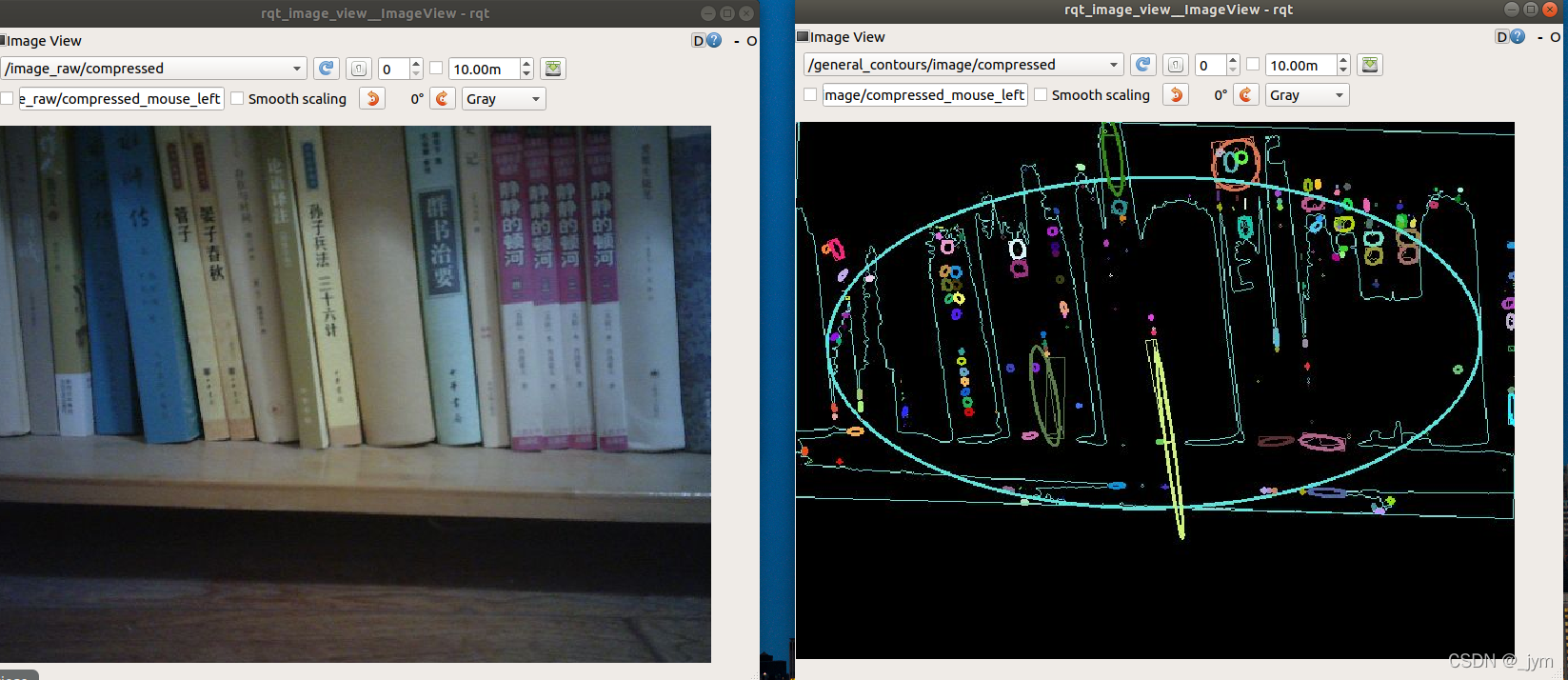
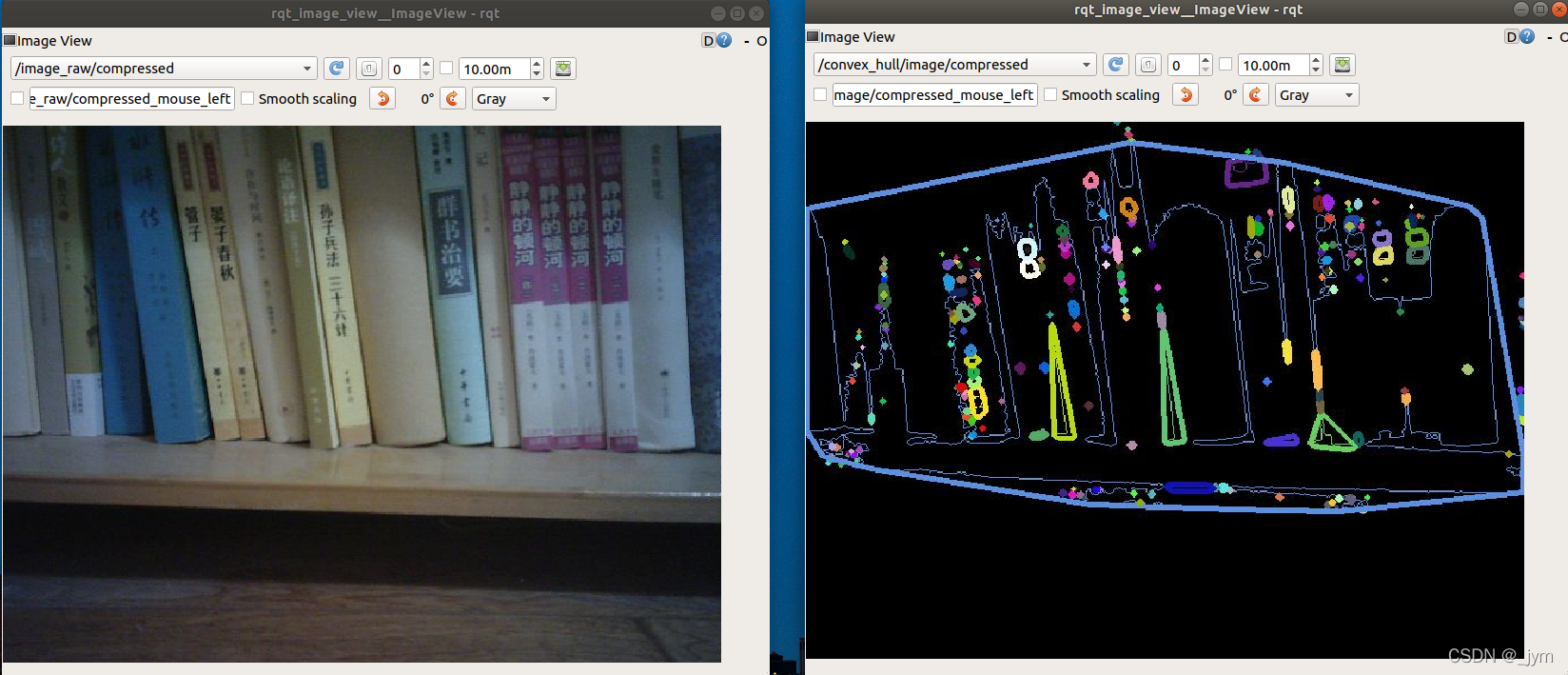
然后就可以用opencv做一些事情。下面这个其实就是机器人端运行几个launch文件,pc端打开工具、订阅节点。

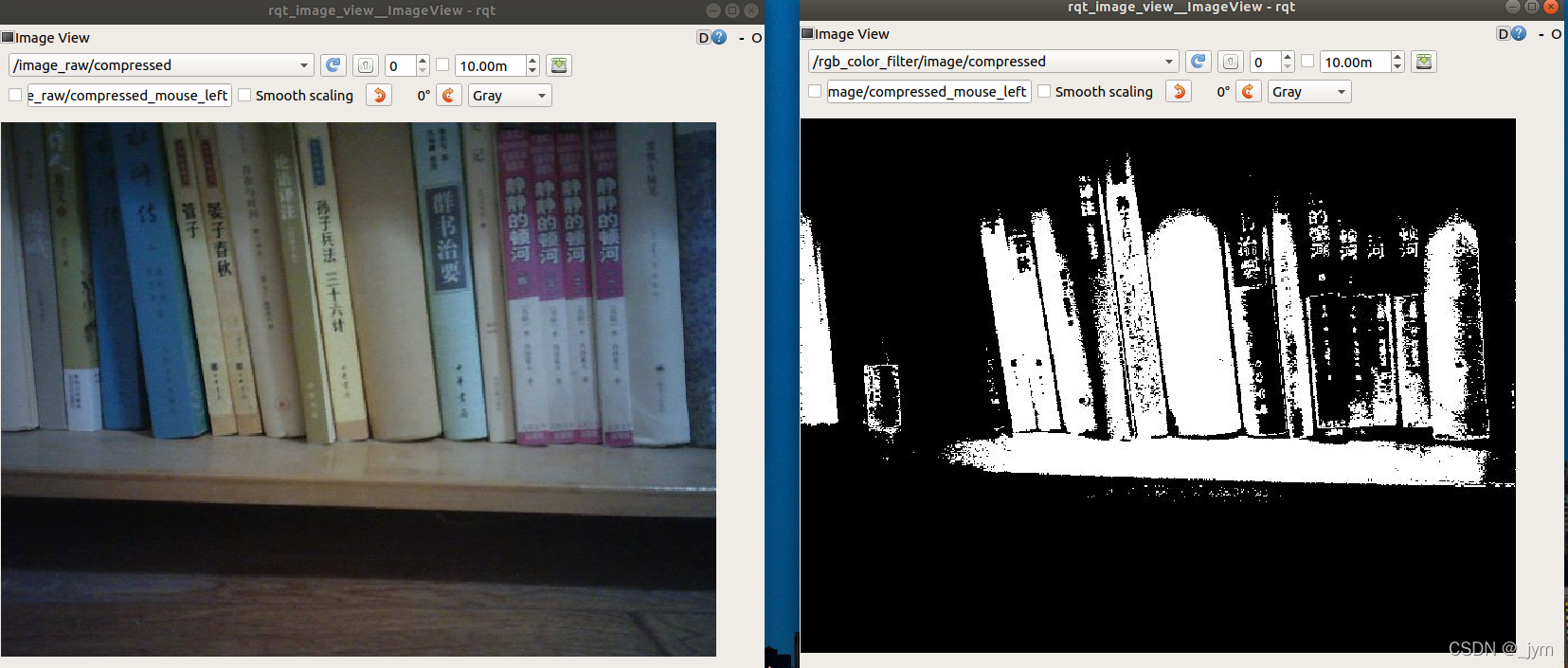
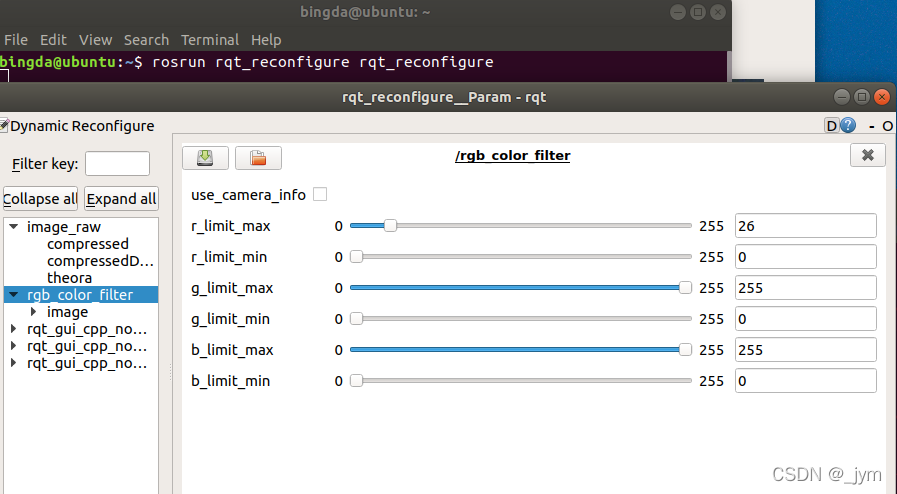
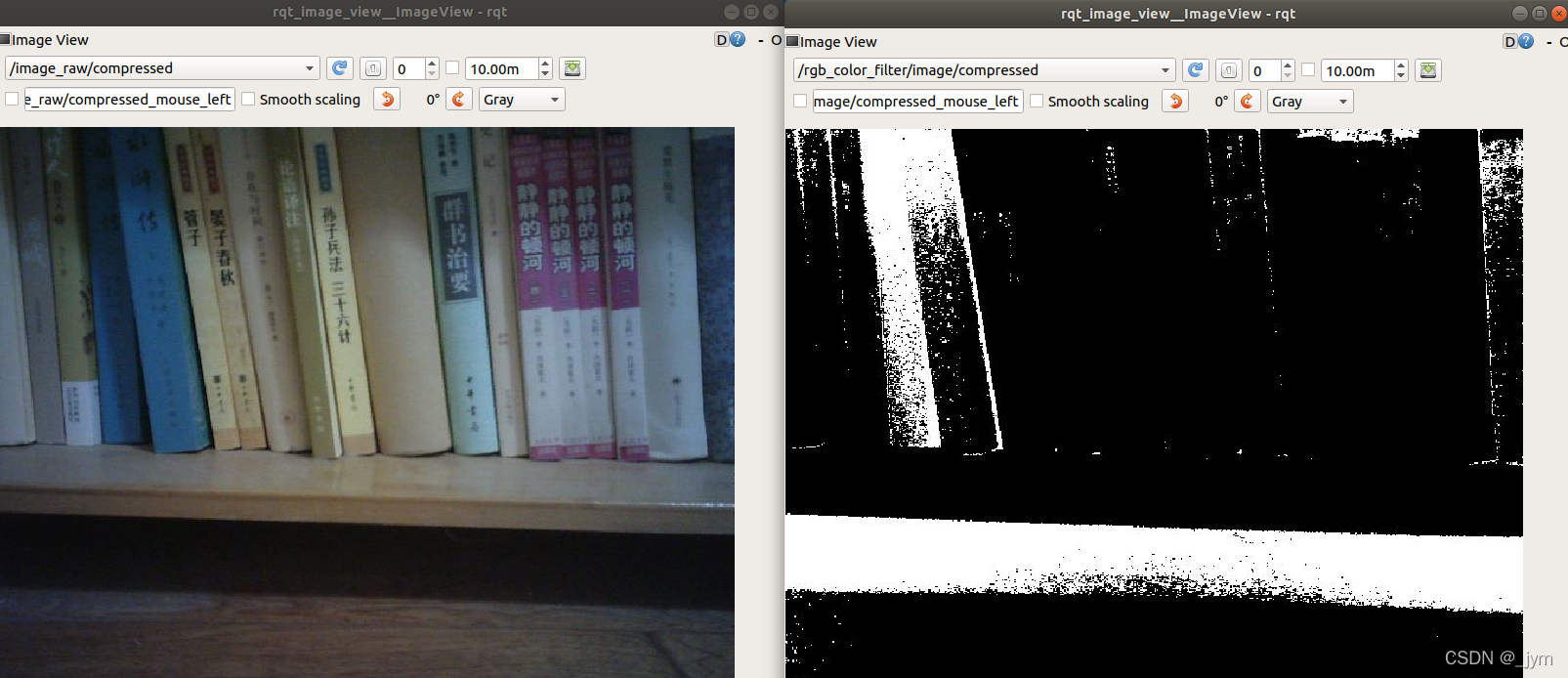
PC 端启动动态调参工具 rosrun rqt_reconfigure rqt_reconfigure,通过修改rgb参数,可以用来识别特定颜色。
下面这个PC 端启动一个画圆的py文件。
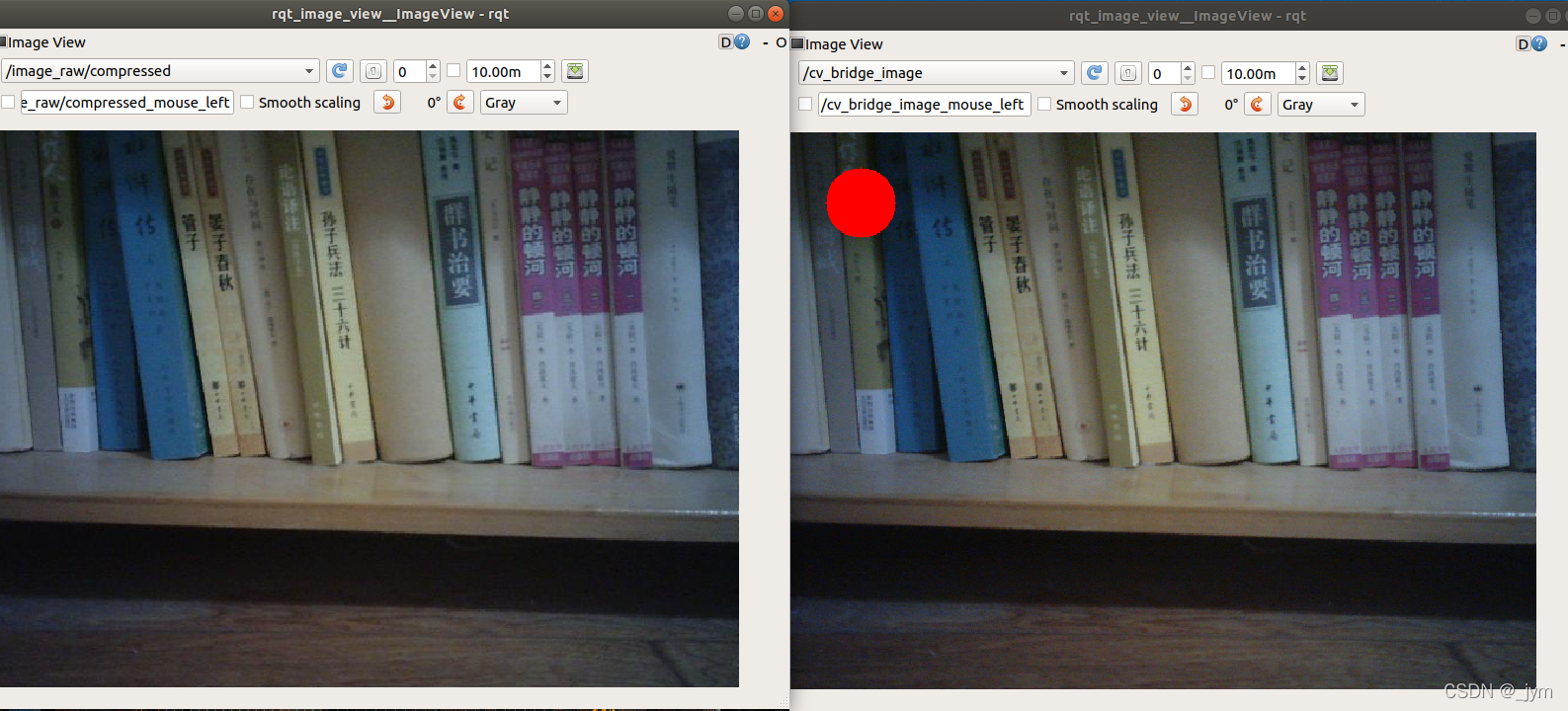
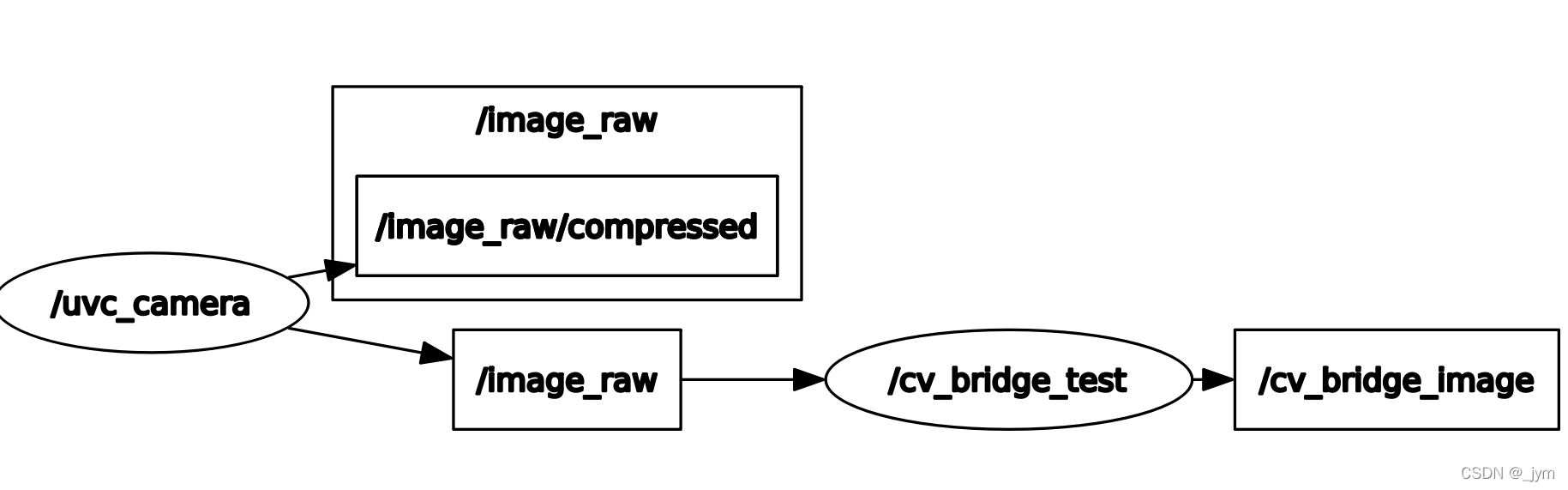
在 PC 端使用 rqt_graph 工具可以看到图像节点和话题之间的关系,可以解释上面这个图像:cv_bridge_test 节点订阅 image_raw 话题,将 image_raw 话题转换成 OpenCV 数据,然后在图像上画点。最后转换成 ROS 话题发布。
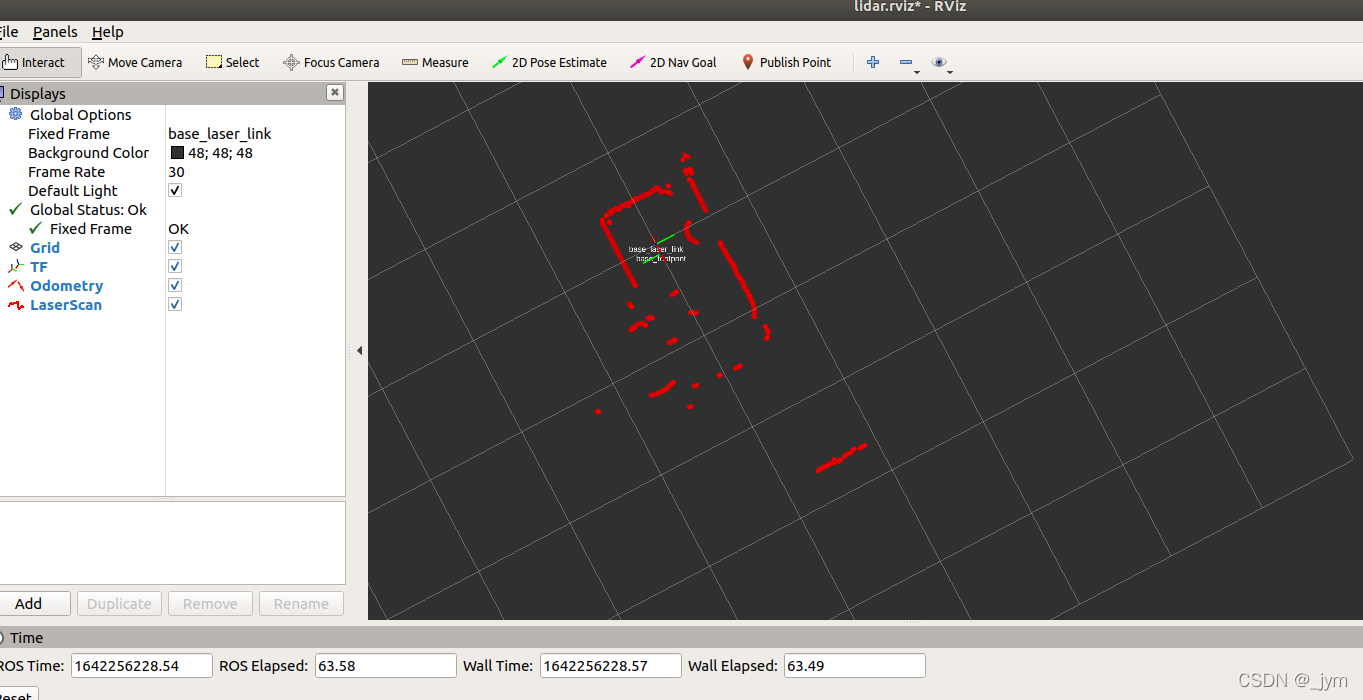
下面这个,PC 端运行 rviz 工具,然后机器人端开激光雷达的launch文件。
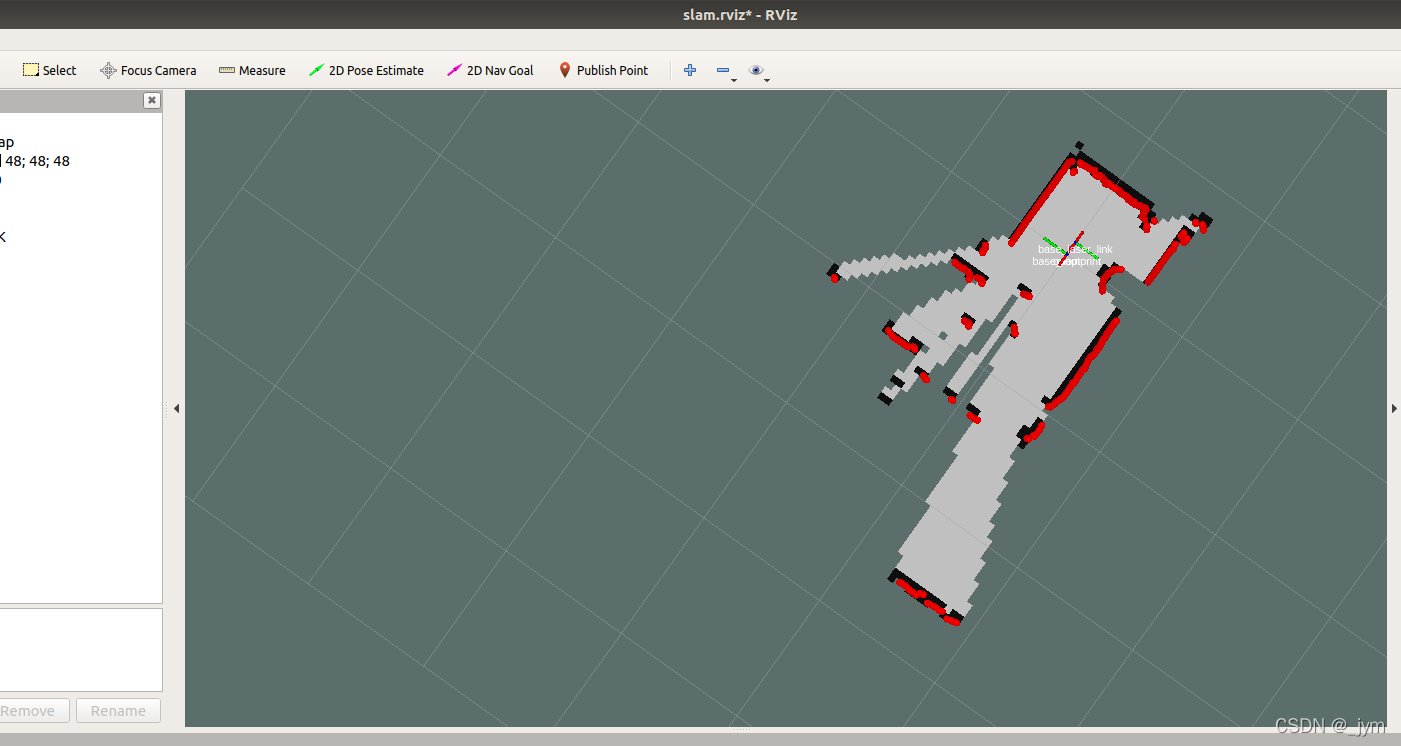
下面这个,机器人端开slam的launch文件。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号