stm32 I2C、EEPROM
2022-01-28 22:14 jym蒟蒻 阅读(842) 评论(0) 收藏 举报main.c
硬件结构如下,EEPROM 芯片(AT24C02)的 SCL 及 SDA 引脚连接到了 STM32 的 I2C 引脚中,结合上拉电阻,构成了 I2C 通讯总线,它们通过 I2C 总线交互。
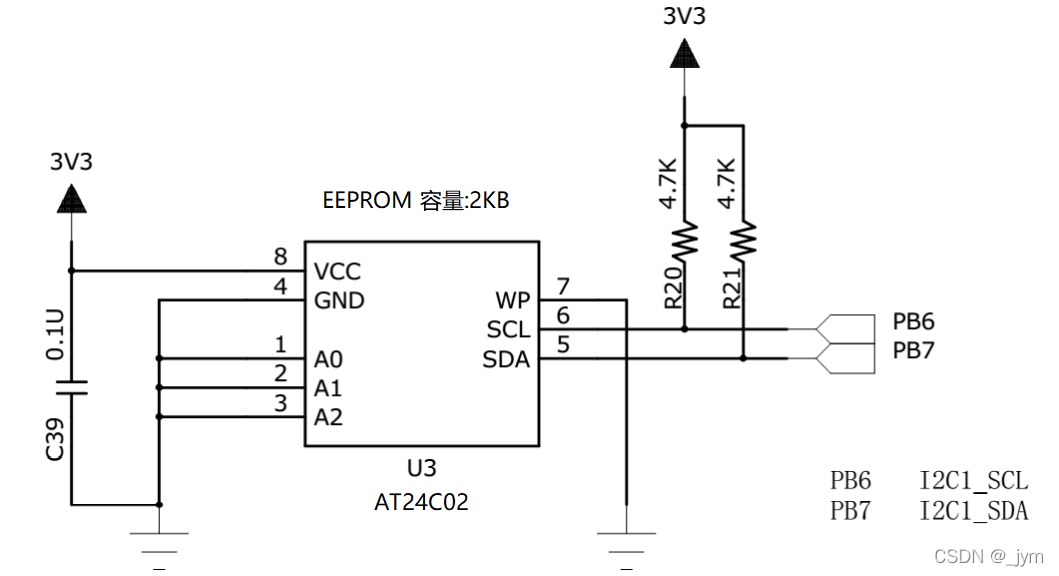
EEPROM 芯片的设备地址:一共有 7 位,其中高 4 位固定为:1010 b,低 3 位则由 A0/A1/A2 信号线的电平决定。设备地址如下图,图中的 R/W 是读写方向位,与地址无关。

I2C 通讯时常常是地址跟读写方向连在一起构成一个 8 位数,电路图中把A2到A0都接地了,所以都是零,那么当 R/W 位为 0 时,表示写方向,I2C 设备的写地址就是10100000=0xA0;当 R/W 位为 1 时,表示读方向,I2C 设备的读地址就是10100001=0xA1。
AT24C02芯片中还有一个 WP 引脚,具有写保护功能,当该引脚电平为高时,禁止写入数据,当引脚为低电平时,可写入数据,这里直接接地,不使用写保护功能。
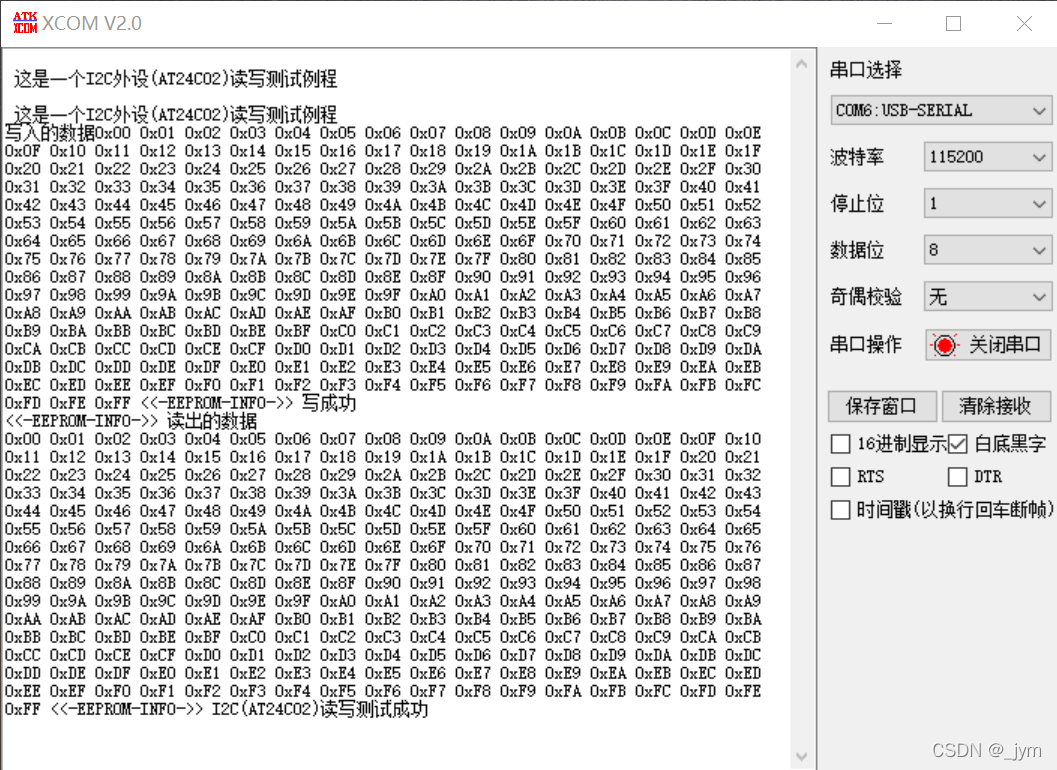
main.c文件里面首先初始化串口、I2C 外设,然后调用 I2C_Test 函数进行读写测试。
下面说一下 I2C_Test函数,函数里首先造一个数组,然后把这个数组的内容写入到 EEPROM 中,这里用的是I2C_EE_BufferWrite函数,它是基于EEPROM页写入方式改进的多字节写入。接着调用I2C_EE_BufferRead函数从EEPROM读出数据,并且保存到I2c_Buf_Read中。把读取得到的与写入的数据进行校验,若一致说明读写正常。至于输出到串口上,采用重定向的方法,重定向后可使用printf函数直接把数据输出到串口。
结果:
#include "stm32f10x.h"
#include "./led/bsp_led.h"
#include "./usart/bsp_usart.h"
#include "./i2c/bsp_i2c_ee.h"
#include <string.h>
#define EEP_Firstpage 0x00
uint8_t I2c_Buf_Write[256];
uint8_t I2c_Buf_Read[256];
uint8_t I2C_Test(void);
/**
* @brief 主函数
* @param 无
* @retval 无
*/
int main(void)
{
LED_GPIO_Config();
LED_BLUE;
/* 串口初始化 */
USART_Config();
printf("\r\n 这是一个I2C外设(AT24C02)读写测试例程 \r\n");
/* I2C 外设初(AT24C02)始化 */
I2C_EE_Init();
printf("\r\n 这是一个I2C外设(AT24C02)读写测试例程 \r\n");
//EEPROM 读写测试
if(I2C_Test() ==1)
{
LED_GREEN;
}
else
{
LED_RED;
}
while (1)
{
}
}
/**
* @brief I2C(AT24C02)读写测试
* @param 无
* @retval 正常返回1,异常返回0
*/
uint8_t I2C_Test(void)
{
uint16_t i;
printf("写入的数据\n\r");
for ( i=0; i<=255; i++ ) //填充缓冲
{
I2c_Buf_Write[i] = i;
printf("0x%02X ", I2c_Buf_Write[i]);
if(i%16 == 15)
printf("\n\r");
}
//将I2c_Buf_Write中顺序递增的数据写入EERPOM中
I2C_EE_BufferWrite( I2c_Buf_Write, EEP_Firstpage, 256);
EEPROM_INFO("\n\r写成功\n\r");
EEPROM_INFO("\n\r读出的数据\n\r");
//将EEPROM读出数据顺序保持到I2c_Buf_Read中
I2C_EE_BufferRead(I2c_Buf_Read, EEP_Firstpage, 256);
//将I2c_Buf_Read中的数据通过串口打印
for (i=0; i<256; i++)
{
if(I2c_Buf_Read[i] != I2c_Buf_Write[i])
{
EEPROM_ERROR("0x%02X ", I2c_Buf_Read[i]);
EEPROM_ERROR("错误:I2C EEPROM写入与读出的数据不一致\n\r");
return 0;
}
printf("0x%02X ", I2c_Buf_Read[i]);
if(i%16 == 15)
printf("\n\r");
}
EEPROM_INFO("I2C(AT24C02)读写测试成功\n\r");
return 1;
}
这里面写了一些I2C 硬件相关的宏定义。
把与 EEPROM 通讯使用的 I2C 号 、引脚号都以宏封装起来, 并且定义了自身的 I2C 地址及通讯速率,以便配置模式的时候使用。
#ifndef __I2C_EE_H
#define __I2C_EE_H
#include "stm32f10x.h"
/**************************I2C参数定义,I2C1或I2C2********************************/
#define EEPROM_I2Cx I2C1
#define EEPROM_I2C_APBxClock_FUN RCC_APB1PeriphClockCmd
#define EEPROM_I2C_CLK RCC_APB1Periph_I2C1
#define EEPROM_I2C_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define EEPROM_I2C_GPIO_CLK RCC_APB2Periph_GPIOB
#define EEPROM_I2C_SCL_PORT GPIOB
#define EEPROM_I2C_SCL_PIN GPIO_Pin_6
#define EEPROM_I2C_SDA_PORT GPIOB
#define EEPROM_I2C_SDA_PIN GPIO_Pin_7
/* STM32 I2C 快速模式 */
#define I2C_Speed 400000 //*
/* 这个地址只要与STM32外挂的I2C器件地址不一样即可 */
#define I2Cx_OWN_ADDRESS7 0X0A
/* AT24C01/02每页有8个字节 */
#define I2C_PageSize 8
/* AT24C04/08A/16A每页有16个字节 */
//#define I2C_PageSize 16
/*等待超时时间*/
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10 * I2CT_FLAG_TIMEOUT))
/*信息输出*/
#define EEPROM_DEBUG_ON 0
#define EEPROM_INFO(fmt,arg...) printf("<<-EEPROM-INFO->> "fmt"\n",##arg)
#define EEPROM_ERROR(fmt,arg...) printf("<<-EEPROM-ERROR->> "fmt"\n",##arg)
#define EEPROM_DEBUG(fmt,arg...) do{\
if(EEPROM_DEBUG_ON)\
printf("<<-EEPROM-DEBUG->> [%d]"fmt"\n",__LINE__, ##arg);\
}while(0)
/*
* AT24C02 2kb = 2048bit = 2048/8 B = 256 B
* 32 pages of 8 bytes each
*
* Device Address
* 1 0 1 0 A2 A1 A0 R/W
* 1 0 1 0 0 0 0 0 = 0XA0
* 1 0 1 0 0 0 0 1 = 0XA1
*/
/* EEPROM Addresses defines */
#define EEPROM_Block0_ADDRESS 0xA0 /* E2 = 0 */
//#define EEPROM_Block1_ADDRESS 0xA2 /* E2 = 0 */
//#define EEPROM_Block2_ADDRESS 0xA4 /* E2 = 0 */
//#define EEPROM_Block3_ADDRESS 0xA6 /* E2 = 0 */
void I2C_EE_Init(void);
void I2C_EE_BufferWrite(u8* pBuffer, u8 WriteAddr, u16 NumByteToWrite);
uint32_t I2C_EE_ByteWrite(u8* pBuffer, u8 WriteAddr);
uint32_t I2C_EE_PageWrite(u8* pBuffer, u8 WriteAddr, u8 NumByteToWrite);
uint32_t I2C_EE_BufferRead(u8* pBuffer, u8 ReadAddr, u16 NumByteToRead