STM32-独立看门狗原理-实验
2022-01-12 00:53 jym蒟蒻 阅读(1378) 评论(0) 收藏 举报独立看门狗原理概述
在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的模块或者芯片,俗称“看门狗”(watchdog) 。
在启动正常运行的时候,系统不能复位
在系统跑飞(程序异常执行)的情况,使系统复位,程序重新执行
STM32内置两个看门狗:独立看门狗和窗口看门狗。
两个看门狗提供了更高的安全性,时间的精确性和使用的灵活性。
两个看门狗设备(独立看门狗/窗口看门狗)可以用来检测和 解决由软件错误引起的故障。当计数器达到给定的超时值时,触发一个中断(仅适用窗口看门狗)或者产生系统复位。
独立看门狗(IWDG)由专用的低速时钟(LSI)驱动,即使主时钟发生故障它仍有效。
独立看门狗适合应用于需要看门狗作为一个在主程序之外 能够完全独立工作,并且对时间精度要求低的场合。
窗口看门狗由从APB1时钟分频后得到时钟驱动。通过可配置的时间窗口来检测应用程序非正常的过迟或过早操作.窗口看门狗最适合那些要求看门狗在精确计时窗口起作用的程序。
M7的独立看门狗还可以配置做窗口看门狗使用。
因为M7本身带了窗口看门狗,所以一般情况下,我们都比较少使用此功能。
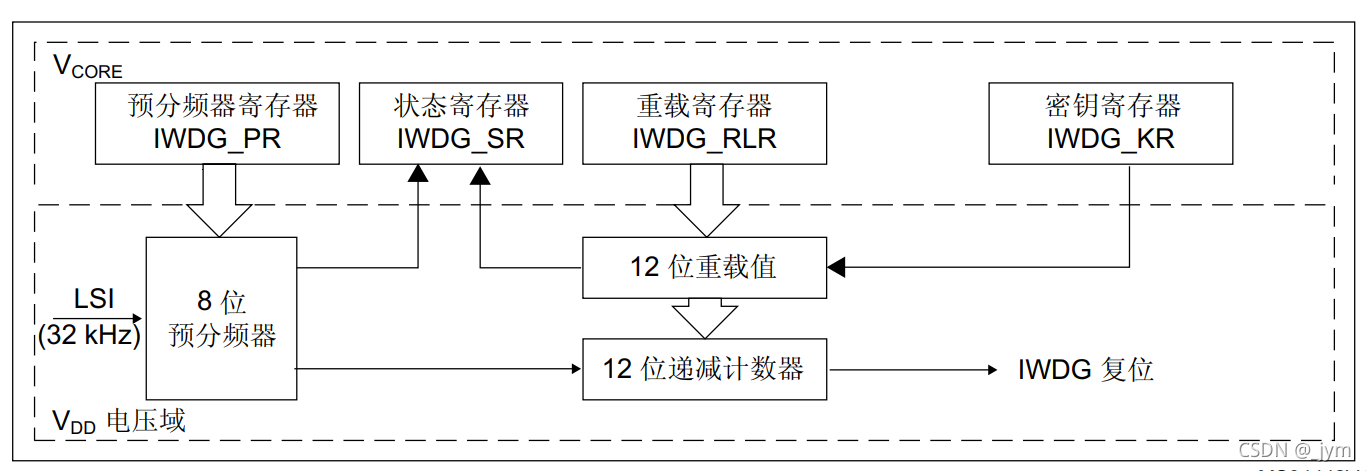
在键值寄存器(IWDG_KR)中写入0xCCCC,开始启用独立看门狗。此时计数器开始从其复位值0xFFF递减,当计数器值计数到尾值0x000时会产生一个复位信号(IWDG_RESET)。
无论何时,只要在键值寄存器IWDG_KR中写入0xAAAA(通常说的喂狗), 自动重装载寄存器IWDG_RLR的值就会重新加载到计数器,从而避免看门狗复位。
如果程序异常,就无法正常喂狗,从而系统复位。
时钟来自于LSI,经过分频,产生一个时钟,进入12位递减计数器。首先在键寄存器中写入0xcccc,那么就开始从初值开始计数,如果说键寄存器中写入0xaaaa,那么就把RLR寄存器中的值重新加载到计数器。当程序不正常喂狗的时候,就会一直减到零,然后产生复位信号。
溢出时间计算:
Tout=((4×2^prer) ×rlr) /32 (M4)
32 /(4×2^ prer)就是经过分频后的频率。其中prer是设置的PR[2:0]位,然后倒过来就是周期,那么溢出时间就是((4×2^ prer) ×rlr) /32,其中rlr是重装载寄存器的值。
时钟频率LSI=32K, 一个看门狗时钟周期就是最短超时时间。
最长超时时间= (IWDG_RLR寄存器最大值)X看门狗时钟周期.
举个例:如果说要把看门狗溢出时间设置为1s,首先由于时钟频率LSI=32k,如果说预分频是64,那么LSI/64=0.5khz,也就是说可以设置rlr的值为500,这样的话溢出时间就是1s。注意重装载寄存器rlr的最大值是2^12-1,不能大于它。
IWDG_KR:键值寄存器,0~15位有效
IWDG_PR:预分频寄存器,0~2位有效。具有写保护功能,要操作先取消写保护
IWDG_RLR:重装载寄存器,0~11位有效。具有写保护功能,要操作先取消写保护。
IWDG_SR:状态寄存器,0~1位有效
键值寄存器:IWDG_KR

KEY[15:0]:键值 (Key value)(只能写,读为 0x0000)
必须每隔一段时间便通过软件对这些位写入键值 0xAAAA,否则当计数器计数到 0 时,看门狗会产生复位。
写入键值 0x5555 可使能对 IWDG_PR、IWDG_RLR 和 IWDG_WINR 寄存器的访问
写入键值 0xCCCC可启动看门狗(选中硬件看门狗选项的情况除外)
预分频寄存器:IWDG_PR

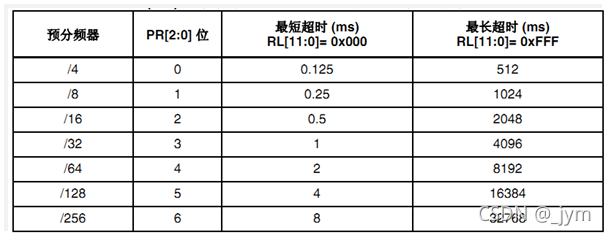
位 2:0 PR[2:0]:预分频系数 (Prescaler divider)
这些位受写访问保护。通过软件设置这些位来选择计数器时钟的预分频因子。若要更改预分频器的分频系数,IWDG_SR 的 PVU 位必须为 0。
000:4 分频
001:8 分频
010:16 分频
011:32 分频
100:64 分频
101:128 分频
110:256 分频
111:256 分频
重装载寄存器:IWDG_RLR

位 11:0 RL[11:0]:看门狗计数器重载值 (Watchdog counter reload value)
这些位受写访问保护。这个值由软件设置,每次对 IWDG_KR 寄存器写入值 0xAAAA 时,这个值就会重装载到看门狗计数器中。之后,看门狗计数器便从该装载的值开始递减计数。超时周期由该值和时钟预分频器共同决定。
若要更改重载值,IWDG_SR 中的 RVU 位必须为 0
状态寄存器:IWDG_SR

位 31:3 保留,必须保持复位值。
位 2 WVU:看门狗计数器窗口值更新 (Watchdog counter window value update) 可通过硬件将该位置 1 以指示窗口值正在更新。当在 VDD 电压域下完成重载值更新操作后(需 要多达 5 个 RC 40 kHz 周期),会通过硬件将该位复位。 窗口值只有在 WVU 位为 0 时才可更新。 此位只有在通用“窗口”= 1 时才生成。
位 1 RVU:看门狗计数器重载值更新 (Watchdog counter reload value update) 可通过硬件将该位置 1 以指示重载值正在更新。当在 VDD 电压域下完成重载值更新操作后(需 要多达 5 个 RC 40 kHz 周期),会通过硬件将该位复位。 重载值只有在 RVU 位为 0 时才可更新。
位 0 PVU:看门狗预分频器值更新 (Watchdog prescaler value update) 可通过硬件将该位置 1 以指示预分频器值正在更新。当在 VDD 电压域下完成预分频器值更新操 作后(需要多达 5 个 RC 40 kHz 周期),会通过硬件将该位复位。 预分频器值只有在 PVU 位为 0 时才可更新。
HAL_StatusTypeDef HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg);独立看门狗的初始化函数
找到参数的定义:可以发现和其他外设的句柄类似。第一个成员变量是外设的基地址。
typedef struct
{
IWDG_TypeDef *Instance; /*!< Register base address */
IWDG_InitTypeDef Init; /*!< IWDG required parameters */
HAL_LockTypeDef Lock; /*!< IWDG Locking object */
__IO HAL_IWDG_StateTypeDef State; /*!< IWDG communication state */
}IWDG_HandleTypeDef;
然后找到第二个变量IWDG_InitTypeDef的定义:Prescaler配置的是预分频系数,Reload配置的是重装载值。
typedef struct
{
uint32_t Prescaler; /*!< Select the prescaler of the IWDG.
This parameter can be a value of @ref IWDG_Prescaler */
uint32_t Reload; /*!< Specifies the IWDG down-counter reload value.
This parameter must be a number between Min_Data = 0 and Max_Data = 0x0FFF */
}IWDG_InitTypeDef;
void HAL_IWDG_MspInit(IWDG_HandleTypeDef *hiwdg);初始化回调函数
HAL_StatusTypeDef HAL_IWDG_Start(IWDG_HandleTypeDef *hiwdg);启动独立看门狗
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg);喂狗
1.初始化看门狗:预分频系数,重装载值。
HAL_IWDG_Init();
该函数在操作PR和RLR寄存器之前会取消写保护。
2.启动看门狗
HAL_IWDG_Start();
3.喂狗:
HAL_IWDG_Refresh();
如何写,首先看文件里面的函数都有啥,然后找参数,然后调函数。
根据步骤1调用HAL_IWDG_Init函数:
首先找到HAL_IWDG_Init独立看门狗的初始化函数:
HAL_StatusTypeDef HAL_IWDG_Init(IWDG_HandleTypeDef *hiwdg)
{
/* Check the IWDG handle allocation */
if(hiwdg == NULL)
{
return HAL_ERROR;
}
/* Check the parameters */
assert_param(IS_IWDG_ALL_INSTANCE(hiwdg->Instance));
assert_param(IS_IWDG_PRESCALER(hiwdg->Init.Prescaler));
assert_param(IS_IWDG_RELOAD(hiwdg->Init.Reload));
if(hiwdg->State == HAL_IWDG_STATE_RESET)
{
/* Allocate lock resource and initialize it */
hiwdg->Lock = HAL_UNLOCKED;
/* Init the low level hardware */
HAL_IWDG_MspInit(hiwdg);
}
/* Change IWDG peripheral state */
hiwdg->State = HAL_IWDG_STATE_BUSY;
/* Enable write access to IWDG_PR and IWDG_RLR registers */
IWDG_ENABLE_WRITE_ACCESS(hiwdg);
/* Write to IWDG registers the IWDG_Prescaler & IWDG_Reload values to work with */
MODIFY_REG(hiwdg->Instance->PR, IWDG_PR_PR, hiwdg->Init.Prescaler);
MODIFY_REG(hiwdg->Instance->RLR, IWDG_RLR_RL, hiwdg->Init.Reload);
/* Change IWDG peripheral state */
hiwdg->State = HAL_IWDG_STATE_READY;
/* Return function status */
return HAL_OK;
}
现在知道参数是个结构体,然后在main里面写:
IWDG_HandleTypeDef iwdg_handler;
HAL_IWDG_Init(&iwdg_handler);
然后开始对iwdg_handler的参数进行设置,可以首先看到HAL_IWDG_Init函数中,有对IWDG_HandleTypeDef类型操作的函数。那我们可以找到这个函数的定义。
assert_param(IS_IWDG_ALL_INSTANCE(hiwdg->Instance));
assert_param(IS_IWDG_PRESCALER(hiwdg->Init.Prescaler));
assert_param(IS_IWDG_RELOAD(hiwdg->Init.Reload));
IS_IWDG_ALL_INSTANCE定义如下:
#define IS_IWDG_ALL_INSTANCE(INSTANCE) ((INSTANCE) == IWDG)
所以说就知道了INSTANCE应该被设置为IWDG。这就叫做有效性判断。
所以main中写: iwdg_handler.Instance = IWDG;
所以一个成员变量就设置好了,同理设置其他的变量。
可以找到Prescaler相关的定义,然后可以在main中写
iwdg_handler.Init.Prescaler = IWDG_PRESCALER_64;
#define IS_IWDG_PRESCALER(__PRESCALER__) (((__PRESCALER__) == IWDG_PRESCALER_4) || \
((__PRESCALER__) == IWDG_PRESCALER_8) || \
((__PRESCALER__) == IWDG_PRESCALER_16) || \
((__PRESCALER__) == IWDG_PRESCALER_32) || \
((__PRESCALER__) == IWDG_PRESCALER_64) || \
((__PRESCALER__) == IWDG_PRESCALER_128)|| \
((__PRESCALER__) == IWDG_PRESCALER_256))
如果说要把看门狗溢出时间设置为1s,首先由于时钟频率LSI=32k,如果说预分频是64,那么LSI/64=0.5khz,也就是说可以设置rlr的值为500,这样的话溢出时间就是1s。
iwdg_handler.Init.Reload = 500;
然后开始调用HAL_IWDG_Start函数。
HAL_IWDG_Start(&iwdg_handler);
HAL_IWDG_Refresh(&iwdg_handler);//喂狗
系统复位后按键一直没有按下(喂狗),一旦到了溢出时间(1s),就会产生复位。系统如果复位,led灯会熄灭,系统初始化时候是led灯亮,所以说如果一直不按按键,那么系统的led灯会一闪一闪。
如果说按下按键,也就是说喂狗的周期小于溢出时间的话,那么程序就不会复位了,那么led灯就常亮了,这是因为在while执行之前初始化led灯是亮的,如果一直喂狗的话程序就一直在while循环里执行。
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "key.h"
#include "exti.h"
IWDG_HandleTypeDef iwdg_handler;
int main(void)
{
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180); //初始化延时函数
uart_init(115200); //初始化USART
LED_Init(); //初始化LED
EXTI_Init();
delay_ms(100);
iwdg_handler.Instance = IWDG;
iwdg_handler.Init.Prescaler = IWDG_PRESCALER_64;
iwdg_handler.Init.Reload = 500;
HAL_IWDG_Init(&iwdg_handler);
HAL_IWDG_Start(&iwdg_handler);
LED0=0;
while(1)
{
if(KEY_Scan(0)==WK_UP)//检测WK_UP按键是否按下
{
HAL_IWDG_Refresh(&iwdg_handler);//喂狗
delay_ms(10);
}
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号