ROS创建msg和srv、编写发布者和订阅者节点、编写服务端和客户端节点
2022-01-12 00:43 jym蒟蒻 阅读(674) 评论(0) 收藏 举报ROS 创建msg和srv 编写发布者和订阅者节点 编写服务端和客户端节点-python版本
- rosed
- msg和srv
- 创建msg
- 使用rosmsg
- 创建srv
- 使用rossrv
- 重新make一下软件包
- 编写发布者节点
- 发布者节点代码解析
- 编写订阅者节点
- 订阅者节点代码解析
- 构建节点
- 运行发布者和订阅者节点
- 编写服务节点
- 编写客户端节点
- 运行服务端和客户端节点
利用它可以直接通过软件包名编辑包中的文件,而无需键入完整路径。
$ rosed roscpp Logger.msg
编辑roscpp软件包中的Logger.msg文件。退出vim,按下键盘上的Esc,然后分别按下:q!
Tap补全,在不知道准确文件名的情况下,你也可以轻松地查看和编辑包中的所有文件。
$ rosed roscpp <tab><tab>
jym@ubuntu:~$ rosed roscpp
Empty.srv roscpp.cmake
genmsg_cpp.py roscppConfig.cmake
gensrv_cpp.py roscppConfig-version.cmake
GetLoggers.srv roscpp-msg-extras.cmake
Logger.msg roscpp-msg-paths.cmake
msg_gen.py SetLoggerLevel.srv
package.xml
msg(消息):msg文件就是文本文件,用于描述ROS消息的字段。它们用于为不同编程语言编写的消息生成源代码。
srv(服务):一个srv文件描述一个服务。它由两部分组成:请求(request)和响应(response)。
在之前创建的软件包里定义一个新的消息。直接使用roscd beginner_tutorials,会报错。显示:
roscd: No such package/stack 'beginner_tutorials'
因为roscd只能切换到那些路径已经包含在ROS_PACKAGE_PATH环境变量中的软件包。
工作空间构建完成后,要将这个工作空间添加到ROS环境中,需要source一下生成的配置文件。
然后用roscd beginner_tutorials就没问题了。
jym@ubuntu:~$ roscd beginner_tutorials
roscd: No such package/stack 'beginner_tutorials'
jym@ubuntu:~$ . ~/catkin_ws/devel/setup.bash
jym@ubuntu:~$ roscd beginner_tutorials
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$
然后输入:
$ mkdir msg
$ echo "int64 num" > msg/Num.msg
那么就在msg文件夹里面生成了Num.msg文件。
然后打开package.xml,确保有以下两行代码,没有的话加上。
确保msg文件能被转换为C++、Python和其他语言的源代码。
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
在构建时,只需要message_generation,而在运行时,只需要message_runtime。
输入下面指令可以直接打开CMakeLists.txt文件
$ beginner_tutorials CMakeLists.txt
按esc后再按i,可以进入编辑。
1.在CMakeLists.txt文件中,为已经存在里面的find_package调用添加message_generation依赖项
添加message_generation后的find_package如下所示。
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
2.还要确保导出消息的运行时依赖关系:
找到catkin_package添加CATKIN_DEPENDS message_runtime
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
3.找到如下代码块:
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
删除#符号来取消注释,然后将Message*.msg替换为你的.msg文件名,就像下边这样:
add_message_files(
FILES
Num.msg
)
手动添加.msg文件后,我们要确保CMake知道何时需要重新配置项目。
4.现在必须确保generate_messages()函数被调用:
取消下面几行的注释:添加任意你的消息用到的包含.msg文件的软件包(本例中为std_msgs)
# generate_messages(
# DEPENDENCIES
# std_msgs
# )
以上是创建消息的所有步骤。
通过rosmsg show命令看看ROS能否识别创建的消息。
输入:rosmsg show beginner_tutorials/Num
可看到:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ rosmsg show beginner_tutorials/Num
int64 num
上面的例子中,消息类型包含两部分:
beginner_tutorials– 定义消息的软件包Num– 消息的名称Num
如果不记得msg在哪个包中,也可以省略包名称。$ rosmsg show Num
可看到:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ rosmsg show Num
[beginner_tutorials/Num]:
int64 num
可从另一个包复制现有的srv定义,而不是手动创建新的srv。
roscp是一个实用的命令行工具,用于将文件从一个包复制到另一个包。
从rospy_tutorials包中复制一个服务:
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
剩下的和创建msg类似:
1.打开package.xml,确保有以下两行代码:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
2.在CMakeLists.txt文件中,为已经存在里面的find_package调用添加message_generation依赖项。
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
3.在package.xml中修改服务字段。
删除#符号来取消注释,然后将Service*.srv替换为你的.srv文件名,就像下边这样:
add_service_files(
FILES
AddTwoInts.srv
)
以上就是创建服务的所有步骤。
通过rossrv show命令看看ROS能否识别创建的服务。
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ rossrv show beginner_tutorials/AddTwoInts
int64 a
int64 b
---
int64 sum
也可以在不指定包名的情况下找到这样的服务。
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ rossrv show AddTwoInts
[rospy_tutorials/AddTwoInts]:
int64 a
int64 b
---
int64 sum
[beginner_tutorials/AddTwoInts]:
int64 a
int64 b
---
int64 sum
第一个是刚刚在beginner_tutorials包中创建的,第二个是之前rospy_tutorials包中已经存在的。
现在我们已经创建了一些新消息,所以需要重新make一下软件包:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ roscd beginner_tutorials
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ cd ../..
jym@ubuntu:~/catkin_ws$ catkin_make
jym@ubuntu:~/catkin_ws$ cd -
/home/jym/catkin_ws/src/beginner_tutorials
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$
msg目录中的任何.msg文件都将生成所有支持语言的代码。
C++消息的头文件将生成在~/catkin_ws/devel/include/beginner_tutorials/。Python脚本将创建在~/catkin_ws/devel/lib/python3/dist-packages/beginner_tutorials/msg。而Lisp文件则出现在~/catkin_ws/devel/share/common-lisp/ros/beginner_tutorials/msg/。
类似地,srv目录中的任何.srv文件都将生成支持语言的代码。对于C++,头文件将生成在消息的头文件的同一目录中。对于Python和Lisp,会在msg目录旁边的srv目录中。
“节点”是连接到ROS网络的可执行文件。
这里将创建talker(发布者)节点,该节点将不断广播消息。
1.将目录切换到创建的beginner_tutorials包中:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ roscd beginner_tutorials
2.创建一个scripts目录来存放Python脚本:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ mkdir scripts
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ cd scripts
3.在scripts目录下创建talker.py文件:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ vim talker.py
输入:
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
然后给它执行权限:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ chmod +x talker.py
可以通过下面的命令查看和编辑这个文件:
$ rosed beginner_tutorials talker.py
4.将以下内容添加到CMakeLists.txt文件
catkin_install_python(PROGRAMS scripts/talker.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
确保正确安装Python脚本,并使用合适的Python解释器。
#!/usr/bin/env python
每个Python ROS节点的最开头都有这个声明。第一行确保脚本作为Python脚本执行。
import rospy
from std_msgs.msg import String
如果要编写ROS节点,则需要导入rospy。std_msgs.msg的导入则是为了使我们能够重用std_msgs/String消息类型(即一个简单的字符串容器)来发布。
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
这部分代码定义了talker与其他ROS部分的接口。
pub = rospy.Publisher("chatter", String, queue_size=10)声明该节点正在使用String消息类型发布到chatter话题。
这里的String实际上是std_msgs.msg.String类。
queue_size参数是在ROS Hydro及更新版本中新增的,用于在订阅者接收消息的速度不够快的情况下,限制排队的消息数量。
下一行的rospy.init_node(NAME, ...)非常重要,因为它把该节点的名称告诉了rospy。
只有rospy掌握了这一信息后,才会开始与ROS主节点进行通信。
在本例中,节点使用talker名称。注意:名称必须是基本名称,不能包含任何斜杠。
anonymous = True会让名称末尾添加随机数,来确保节点具有唯一的名称。
rate = rospy.Rate(10) # 10hz
此行创建一个Rate对象rate。借助其方法sleep(),它提供了一种方便的方法,来以你想要的速率循环。它的参数是10,即表示希望它每秒循环10次。
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
这个循环是一个相当标准的rospy结构:检查rospy.is_shutdown()标志,然后执行代码逻辑。
查看is_shutdown()以检查程序是否应该退出(例如有Ctrl+C或其他)。
在本例中,代码逻辑即对public .publish(hello_str)的调用,它将一个字符串发布到chatter话题。
循环的部分还调用了rate.sleep(),它在循环中可以用刚刚好的睡眠时间维持期望的速率。
此循环还调用了rospy.loginfo(str),它有3个任务:打印消息到屏幕上;把消息写入节点的日志文件中;写入rosout。
rosout是一个方便的调试工具:可以使用rqt_console来拉取消息,而不必在控制台窗口找节点的输出。
try:
talker()
except rospy.ROSInterruptException:
pass
除了标准的Python __main__检查,它还会捕获一个rospy.ROSInterruptException异常,当按下Ctrl+C或节点因其他原因关闭时,这一异常就会被rospy.sleep()和rospy.Rate.sleep()抛出。
1.将目录切换到scripts目录中:
$ roscd beginner_tutorials/scripts/
2.创建listener.py文件
$ vim listener.py
输入:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
# In ROS, nodes are uniquely named. If two nodes with the same
# name are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
listener()
3.给它执行权限
$ chmod +x listener.py
4.编辑你CMakeLists.txt中的catkin_install_python()调用
可以用rosed打开CMakeLists.txt
rosed beginner_tutorials CMakeLists.txt
然后添加
catkin_install_python(PROGRAMS scripts/talker.py scripts/listener.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
listener.py的代码类似于talker.py,只不过我们为订阅消息引入了一种新的基于回调的机制。
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
这声明节点订阅了chatter话题,类型是std_msgs.msgs.String。当接收到新消息时,callback函数被调用,消息作为第一个参数。
稍微更改了对rospy.init_node()的调用。添加了anonymous=True关键字参数。
ROS要求每个节点都有一个唯一的名称,如果出现具有相同名称的节点,则会与前一个节点发生冲突,这样一来,出现故障的节点很容易地被踢出网络。
anonymous=True标志会告诉rospy为节点生成唯一的名称,这样就很容易可以有多个listener.py一起运行。
rospy.spin()只是不让节点退出,直到节点被明确关闭。
与roscpp不同,rospy.spin()不影响订阅者回调函数,因为它们有自己的线程。
使用CMake作为构建系统。即使是Python节点也必须使用它。这是为了确保能为创建的消息和服务自动生成Python代码。
回到catkin工作空间,然后运行catkin_make:
$ cd ~/catkin_ws
$ catkin_make
开三个终端:
第一个输入:
$ roscore
第二个:
运行talker发布者节点
$ cd ~/catkin_ws
$ source ./devel/setup.bash
$ rosrun beginner_tutorials talker.py
第三个:
$ cd ~/catkin_ws
$ source ./devel/setup.bash
$ rosrun beginner_tutorials listener.py
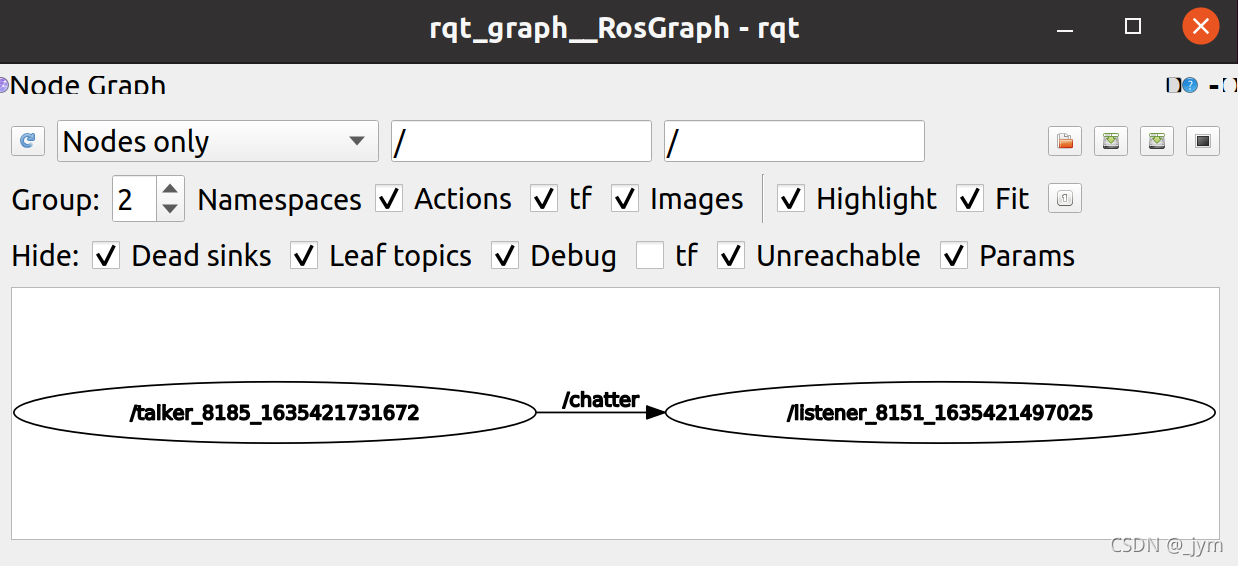
可以通过
$ rosrun rqt_graph rqt_graph
看到当前运行的节点和话题
发布者节点发出:
[INFO] [1635421895.494006]: hello world 1635421895.4938853
[INFO] [1635421895.594515]: hello world 1635421895.5943954
[INFO] [1635421895.694447]: hello world 1635421895.6943207
[INFO] [1635421895.793802]: hello world 1635421895.7936826
[INFO] [1635421895.893810]: hello world 1635421895.893687
[INFO] [1635421895.993590]: hello world 1635421895.9934704
[INFO] [1635421896.094563]: hello world 1635421896.0942173
[INFO] [1635421896.194204]: hello world 1635421896.1938524
[INFO] [1635421896.294536]: hello world 1635421896.2941887
[INFO] [1635421896.394086]: hello world 1635421896.3939602
[INFO] [1635421896.493973]: hello world 1635421896.4936652
[INFO] [1635421896.594645]: hello world 1635421896.5942914
[INFO] [1635421896.694563]: hello world 1635421896.6942132
[INFO] [1635421896.794407]: hello world 1635421896.7942781
[INFO] [1635421896.894170]: hello world 1635421896.8938253
^Cjym@ubuntu:~/catkin_ws$
订阅者节点收到:
[INFO] [1635421896.198918]: /listener_8151_1635421497025I heard hello world 1635421896.1938524
[INFO] [1635421896.299254]: /listener_8151_1635421497025I heard hello world 1635421896.2941887
[INFO] [1635421896.397918]: /listener_8151_1635421497025I heard hello world 1635421896.3939602
[INFO] [1635421896.498270]: /listener_8151_1635421497025I heard hello world 1635421896.4936652
[INFO] [1635421896.599628]: /listener_8151_1635421497025I heard hello world 1635421896.5942914
[INFO] [1635421896.698885]: /listener_8151_1635421497025I heard hello world 1635421896.6942132
[INFO] [1635421896.795746]: /listener_8151_1635421497025I heard hello world 1635421896.7942781
[INFO] [1635421896.898501]: /listener_8151_1635421497025I heard hello world 1635421896.8938253
可以看到在发布者节点添加ctrl+c之后,订阅者节点也不接收消息了。
前面已经创建了需要的服务AddTwoInts.srv。
接下来:
在beginner_tutorials包中创建scripts/add_two_ints_server.py文件并粘贴以下内容进去:
#!/usr/bin/env python
from __future__ import print_function
from beginner_tutorials.srv import AddTwoInts,AddTwoIntsResponse
import rospy
def handle_add_two_ints(req):
print("Returning [%s + %s = %s]"%(req.a, req.b, (req.a + req.b)))
return AddTwoIntsResponse(req.a + req.b)
def add_two_ints_server():
rospy.init_node('add_two_ints_server')
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)
print("Ready to add two ints.")
rospy.spin()
if __name__ == "__main__":
add_two_ints_server()
然后将以下内容添加到CMakeLists.txt文件。确保正确安装Python脚本,并使用合适的Python解释器。
catkin_install_python(PROGRAMS scripts/add_two_ints_server.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
以上流程在linux上输入的指令代码:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials$ roscd beginner_tutorials/scripts/
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ vim add_two_ints_server.py
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ chmod +x add_two_ints_server.py
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ rosed beginner_tutorials CMakeLists.txt
使用rospy编写服务。使用init_node()声明我们的节点,然后再声明我们的服务:
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints)
这声明了一个名为add_two_ints的新服务,其服务类型为AddTwoInts。所有的请求(request)都传递给了handle_add_two_ints函数。handle_add_two_ints被AddTwoIntsRequest的实例调用,返回AddTwoIntsResponse实例。
就像订阅者中的例子一样,rospy.spin()可以防止代码在服务关闭之前退出。
在beginner_tutorials包中创建scripts/add_two_ints_client.py文件并粘贴以下内容进去:
#!/usr/bin/env python
from __future__ import print_function
import sys
import rospy
from beginner_tutorials.srv import *
def add_two_ints_client(x, y):
rospy.wait_for_service('add_two_ints')
try:
add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts)
resp1 = add_two_ints(x, y)
return resp1.sum
except rospy.ServiceException as e:
print("Service call failed: %s"%e)
def usage():
return "%s [x y]"%sys.argv[0]
if __name__ == "__main__":
if len(sys.argv) == 3:
x = int(sys.argv[1])
y = int(sys.argv[2])
else:
print(usage())
sys.exit(1)
print("Requesting %s+%s"%(x, y))
print("%s + %s = %s"%(x, y, add_two_ints_client(x, y)))
同样将以下内容添加到CMakeLists.txt文件。
catkin_install_python(PROGRAMS scripts/add_two_ints_server.py scripts/add_two_ints_client.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
以上流程在linux上输入的指令代码:
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ roscd beginner_tutorials/scripts/
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ vim add_two_ints_client.py
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ chmod +x add_two_ints_client.py
jym@ubuntu:~/catkin_ws/src/beginner_tutorials/scripts$ rosed beginner_tutorials CMakeLists.txt
客户端(用来调用服务)的代码分析:
对于客户端来说不需要调用init_node()。首先调用:
rospy.wait_for_service('add_two_ints')
这是一种很方便的方法,可以让在add_two_ints服务可用之前一直阻塞。
add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts)
这里为服务的调用创建了一个句柄(handle)。
resp1 = add_two_ints(x, y)
return resp1.sum
然后可以使用这个句柄,就像普通的函数一样调用它。
因为已经将服务的类型声明为AddTwoInts,它会生成AddTwoIntsRequest对象 (you’re free to pass in your own instead)。如果调用失败,rospy.ServiceException将会抛出,所以应该弄一个合适的try/except部分。
使用CMake作为构建系统。为了确保能为创建的消息和服务自动生成Python代码。
切换当前目录到catkin工作空间,然后运行catkin_make:
$ cd ~/catkin_ws
$ catkin_make
现在已经编写了一个简单的服务和客户端
开三个终端:
第一个输入:
$ roscore
第二个:
运行talker发布者节点
$ cd ~/catkin_ws
$ source ./devel/setup.bash
$ rosrun beginner_tutorials add_two_ints_server.py
第三个:
$ cd ~/catkin_ws
$ source ./devel/setup.bash
$ rosrun beginner_tutorials add_two_ints_client.py 1 3
服务节点运行效果:
jym@ubuntu:~/catkin_ws$ rosrun beginner_tutorials add_two_ints_server.py
Ready to add two ints.
Returning [1 + 3 = 4]
客户端节点运行效果:
jym@ubuntu:~/catkin_ws$ rosrun beginner_tutorials add_two_ints_client.py 1 3
Requesting 1+3
1 + 3 = 4
 浙公网安备 33010602011771号
浙公网安备 33010602011771号