
无损卡尔曼滤波UKF(4)-预测-预测Sigma点
无损卡尔曼滤波UKF(4)-预测Sigma点
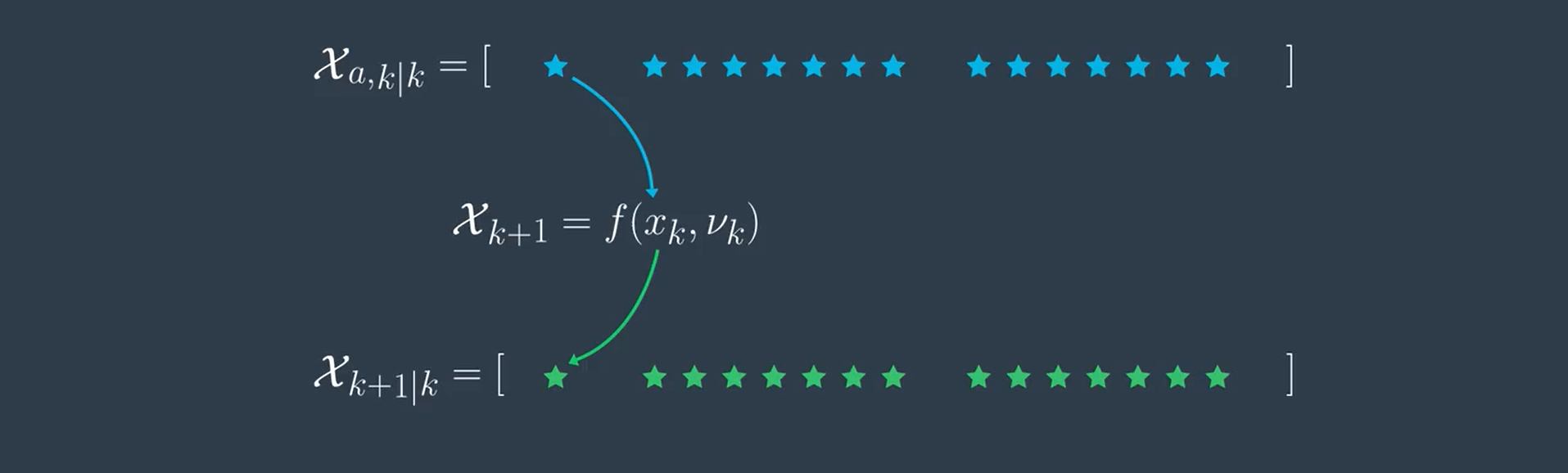
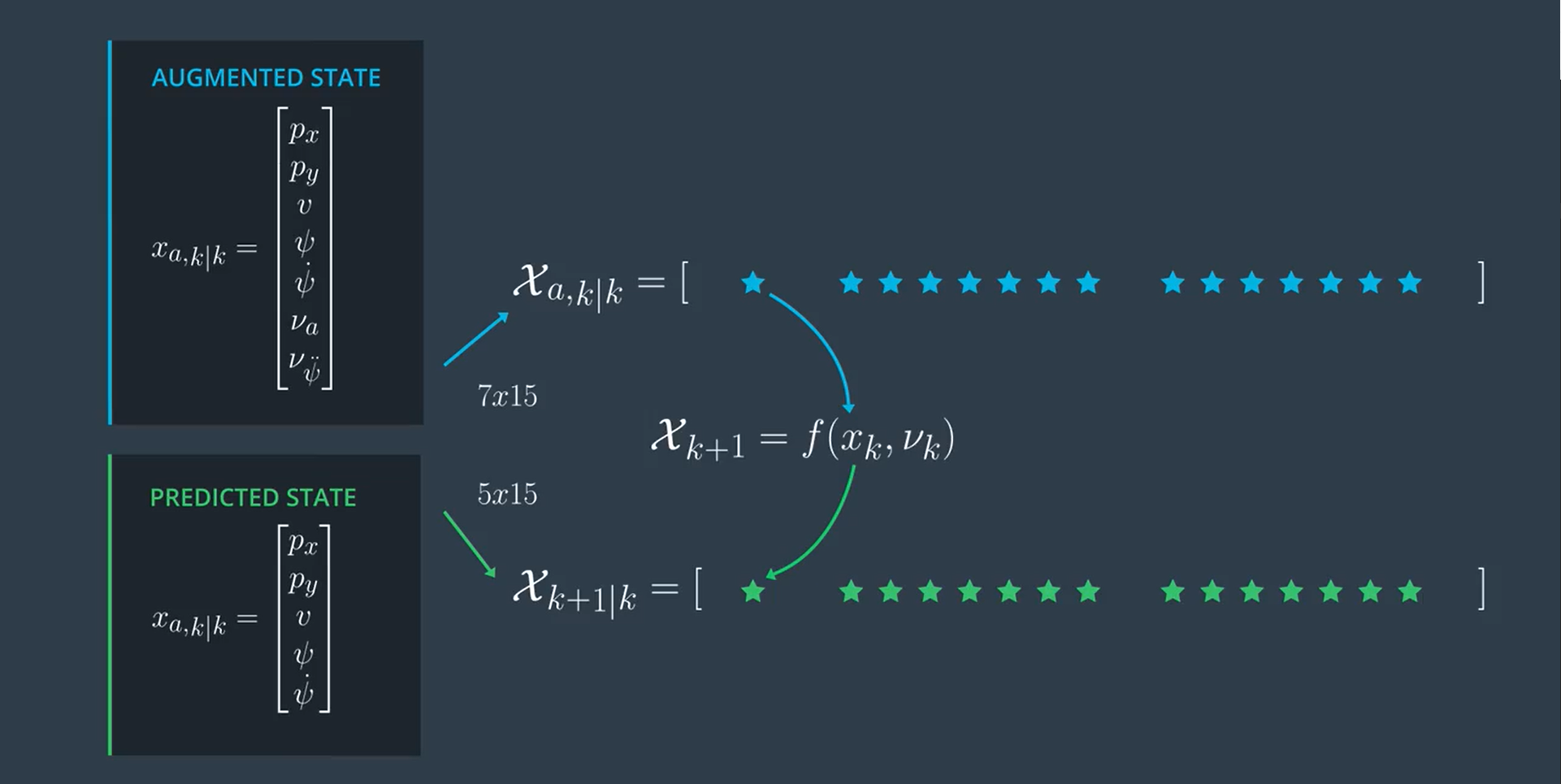
- 每次迭代,需要k时刻的Sigma点带入过程函数
- 输入是 7维向量 扩充状态
- 输出是 5维向量 预测状态
void UKF::SigmaPointPrediction(MatrixXd* Xsig_out) {
// 状态维数
int n_x = 5;
// 扩充状态维数
int n_aug = 7;
// 给定扩充状态的Sigma矩阵
MatrixXd Xsig_aug = MatrixXd(n_aug, 2 * n_aug + 1);
Xsig_aug <<
5.7441, 5.85768, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.63052, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441, 5.7441,
1.38, 1.34566, 1.52806, 1.38, 1.38, 1.38, 1.38, 1.38, 1.41434, 1.23194, 1.38, 1.38, 1.38, 1.38, 1.38,
2.2049, 2.28414, 2.24557, 2.29582, 2.2049, 2.2049, 2.2049, 2.2049, 2.12566, 2.16423, 2.11398, 2.2049, 2.2049, 2.2049, 2.2049,
0.5015, 0.44339, 0.631886, 0.516923, 0.595227, 0.5015, 0.5015, 0.5015, 0.55961, 0.371114, 0.486077, 0.407773, 0.5015, 0.5015, 0.5015,
0.3528, 0.299973, 0.462123, 0.376339, 0.48417, 0.418721, 0.3528, 0.3528, 0.405627, 0.243477, 0.329261, 0.22143, 0.286879, 0.3528, 0.3528,
0, 0, 0, 0, 0, 0, 0.34641, 0, 0, 0, 0, 0, 0, -0.34641, 0,
0, 0, 0, 0, 0, 0, 0, 0.34641, 0, 0, 0, 0, 0, 0, -0.34641;
// 创建预测Sigma矩阵
MatrixXd Xsig_pred = MatrixXd(n_x, 2 * n_aug + 1);
double delta_t = 0.1; // time diff in sec
// 枚举每一列,预测Sigma点
for(int i = 0; i < 2*n_aug + 1 ; i ++)
{
double p_x = Xsig_aug(0,i);
double p_y = Xsig_aug(1,i);
double v = Xsig_aug(2,i);
double yaw = Xsig_aug(3,i);
double yawd = Xsig_aug(4,i);
double nu_a = Xsig_aug(5,i);
double nu_yawdd = Xsig_aug(6,i);
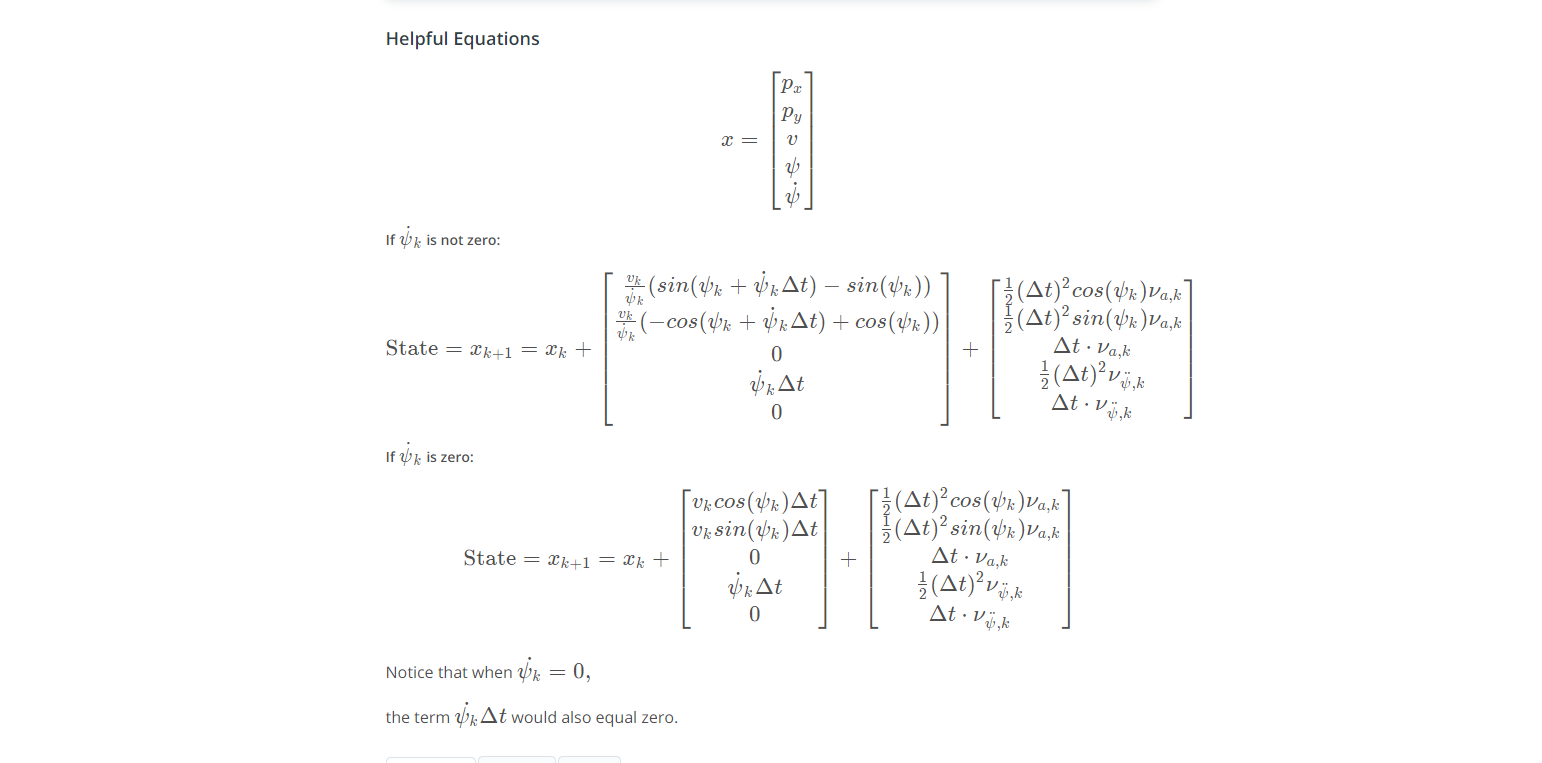
// 根据公式计算
double px_p, py_p;
double v_p = v;
double yaw_p = yaw + yawd*delta_t;
double yawd_p = yawd;
// 避免角速度为0
if (fabs(yawd) > 0.001) {
px_p = p_x + v/yawd * ( sin (yaw + yawd*delta_t) - sin(yaw));
py_p = p_y + v/yawd * ( cos(yaw) - cos(yaw+yawd*delta_t) );
} else {
px_p = p_x + v*delta_t*cos(yaw);
py_p = p_y + v*delta_t*sin(yaw);
}
// 把噪声加进去,更新5项的值
px_p = px_p + 0.5*nu_a*delta_t*delta_t * cos(yaw);
py_p = py_p + 0.5*nu_a*delta_t*delta_t * sin(yaw);
v_p = v_p + nu_a*delta_t;
yaw_p = yaw_p + 0.5*nu_yawdd*delta_t*delta_t;
yawd_p = yawd_p + nu_yawdd*delta_t;
// 把结果填入准备好的预测矩阵
Xsig_pred(0,i) = px_p;
Xsig_pred(1,i) = py_p;
Xsig_pred(2,i) = v_p;
Xsig_pred(3,i) = yaw_p;
Xsig_pred(4,i) = yawd_p;
}
std::cout << "Xsig_pred = " << std::endl << Xsig_pred << std::endl;
*Xsig_out = Xsig_pred;
}
本文来自博客园,作者:longlongban,转载请注明原文链接:https://www.cnblogs.com/jiangxinyu1/p/12462538.html
简单学习分享,如有错误欢迎指正
 浙公网安备 33010602011771号
浙公网安备 33010602011771号