
无损卡尔曼滤波UKF(1)-预测--从CTRV过程模型开始
无损卡尔曼滤波UKF(1)-从CTRV过程模型开始
无损卡尔曼滤波
- 处理非线性过程模型和非线性测量模型的替代方法
- 不会对非线性函数进行线性化处理
- 用所谓的sigma点来近似概率分布
- 省去计算雅阁比矩阵的部分
过程模型
1 CV模型的缺陷:
In the extended kalman filter lesson, we used a constant velocity model (CV).
A constant velocity model is one of the most basic motion models used with object tracking.
- 实际上简化了车辆的运动方式,大多数道路是有转弯的。
- 速度为常量,拐弯的你就没法整了。

2 其他模型
- constant turn rate and velocity magnitude model (CTRV)
- constant turn rate and acceleration (CTRA)
- constant steering angle and velocity (CSAV)
- constant curvature and acceleration (CCA)
3 CTRV 模型确定性部分推导
- 固定的转弯速率
- 恒定的速度大小
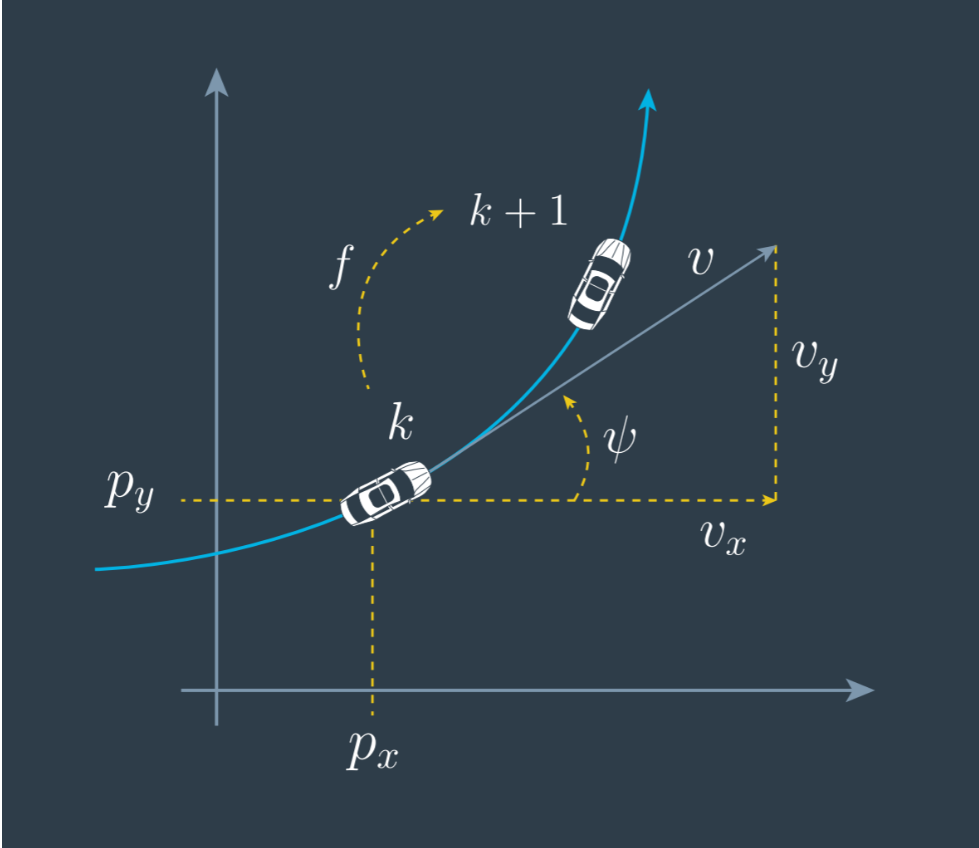
3.1 状态向量
\(x = [px,py,v,\phi,\dot{\phi}]^T\)
- 位置px py
- 速度大小 v
- 偏航角 φ
- 角速度 φ.
3.2 过程模型推导
\(x_{k+1} = f(x_k,v_k);\)
噪声向量vk就是需要我们建模时推导的函数
先讨论状态x的变更速率
\(x = [px,py,v,\phi,\dot{\phi}]^T\)
\(\dot{x} = [\dot{p_x},\dot{p_y},\dot{v},\dot{\phi},\ddot{\phi}]^T\)
其中g(x)的各变量
\(\dot{p_x} = v_x = cos(\phi) \cdot v\)
\(\dot{p_y} = v_y = sin(\phi) \cdot v\)
\(\dot{v} = 0\)
\(\dot{\phi} = \dot{\phi}\)
\(\ddot{\phi} = 0\)
推出差分方程
\(\dot{x} = g(x) = [cos(\phi)\cdot v, sin(\phi)\cdot v , 0 ,\dot{\phi} ,0 ]^T\)
求时间差
\(\Delta t = t_{k+1} - t_k\)
在时间差内求积分 就可以求得时间差内各项的变化,也就是确定性部分的预测方程
\(x_{k+1} = x_k + \int^{t_{k+1}}_{t_k}{g(x)}{\rm d}t\)
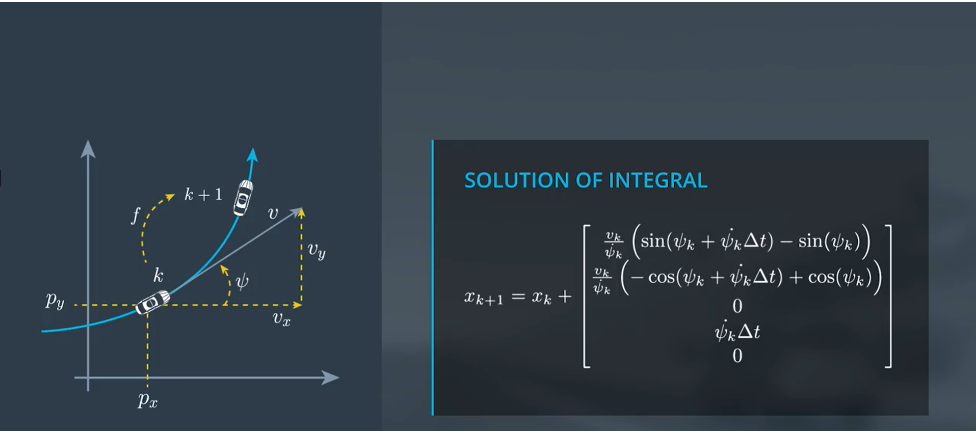
特殊情况:角速度为0的时候
\(p_{x_{k+1}} = p_{x_k} + cos(\phi)\cdot v_k \cdot \Delta t\)
\(p_{y_{k+1}} = p_{y_k} + sin(\phi)\cdot v_k \cdot \Delta t\)
4 CTRV 模型噪声向量推导
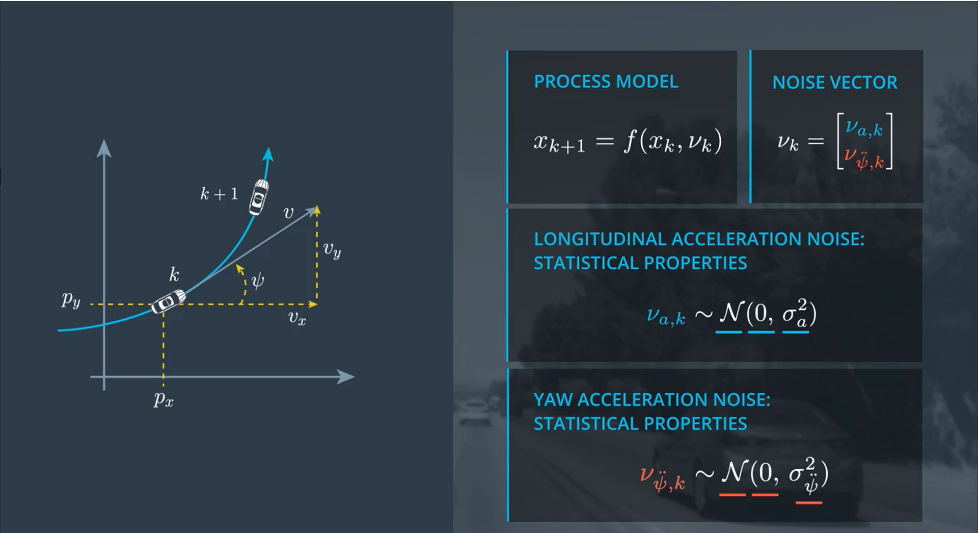
过程模型噪声分为两个部分
我们的CTRV模型,假设了车的纵向速度和角速度为恒定值,忽略了速度的变化。
因此要把加速度项的影响放到误差项里面。
1. 纵向加速度噪声va,表示在纵向速度上的不确定性,因此可以定义为,正态分布的白噪声,以0为均值
\(\nu_{a,k} - N (0,\sigma^2_a )\)
2. 角加速度噪声vφ..,表示偏航角速度上的不确定性,因此可以定义为,正态分布的白噪声,以0为均值
\(\nu_{\ddot{\phi},k} - N (0,\sigma^2_{\ddot{\phi}} )\)
因此,过程噪声向量为:
\(\nu_k = [ \nu_{a,k} , \nu_{\ddot{\phi},k} ]^T\)
考虑噪声向量对整个过程的影响:
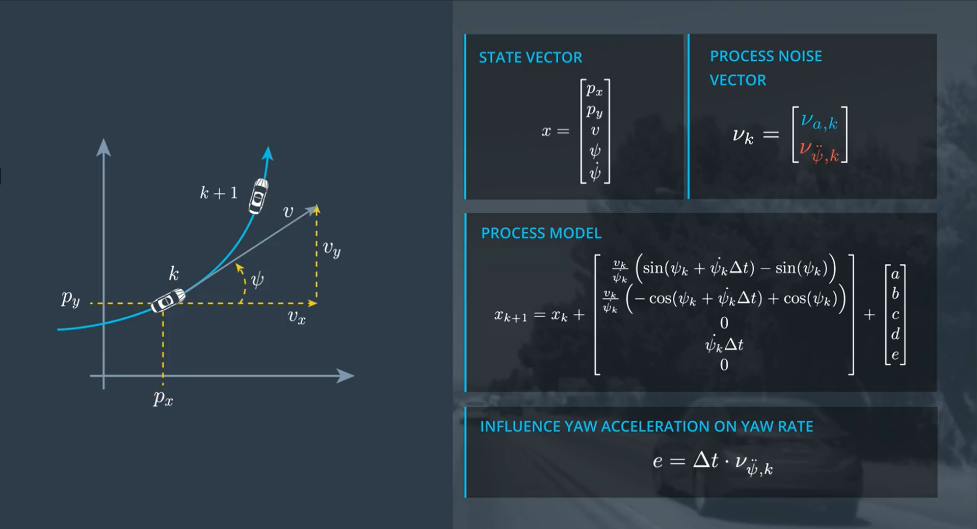
假设误差项-偏航角角加速度和纵向加速度是常量,那么在时间差内产生的误差a,b,c,d,e ,就可以定义为
\(a = (1/2) \cdot \nu_{a,k} \cdot cos(\phi_k) \cdot (\Delta t )^2\)
\(b = (1/2) \cdot \nu_{a,k} \cdot sin(\phi_k) \cdot (\Delta t )^2\)
\(c = \Delta t \cdot \nu_{a,k}\)
\(d = (1/2)\cdot \nu_{\ddot{\phi},k} \cdot (\Delta t )^2\)
\(e = \Delta t \cdot \nu_{\ddot{\phi},k}\)
注意上式中的
\(\nu_{a,k}\)- 和 -\(\nu_{\ddot{\phi},k}\)
分别代表误差项中的纵向加速度项和角加速度项,并不是速度。
到此,CTRV模型的各项我们已经推导结束。
本文来自博客园,作者:longlongban,转载请注明原文链接:https://www.cnblogs.com/jiangxinyu1/p/12448915.html
简单学习分享,如有错误欢迎指正
