
python cv2中的透视变换
透视变换的原理可以参看这篇博客,讲得相当好了
https://blog.csdn.net/guduruyu/article/details/72518340
唯一有一点问题是,博客中提到的透视变换公式:
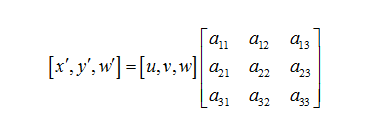
与cv2中的不完全对应,cv2中的公式实际上是
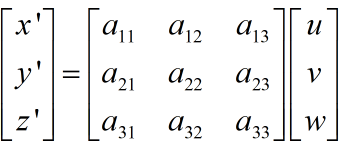
其实原理上是一样的,但是这关系到输入数据的格式
按照原blog的公式,输入的点应该是[u,v,1],而实际上应该是[[u],[v],[1]]。花费一晚上踩的坑,希望对你有用。
另外,附上透视变换后,原图上的点的对应点的坐标求法:
#变换前的四个角点坐标
former = np.float32([[100, 0], [0, 100], [100, 100], [200, 0]])
#变换之后的四个角点坐标
pts = np.float32([[0, 0], [0, 100], [100, 100], [100, 0]])
#变换矩阵M
M = cv2.getPerspectiveTransform(former, pts)
#要变换的原图上的点坐标,注意这里是个二维矩阵!!,按照原博客应该是np.float32([100, 50, 1]),是不正确的
pt = np.float32([[100], [50], [1]])
#原坐标与变换矩阵运算,相当于将该点升维到三维空间
po = M @ pt
#将三维空间的点po的x,y值除以z坐标(拉伸系数,相当于归一化),
po = (po / po[2][0])
print(po)
#po的前两维就是透视变换后的点的x,y值
#当然这一过程可以用cv2中函数实现
print('函数得到的结果:', end='')
po1 = cv2.perspectiveTransform(np.array([[[100, 50]]], dtype=np.float32), M)
print(po1)
#po和po1的结果是一样的


