
惯性张量( Inertia Tensor)与坐标变换
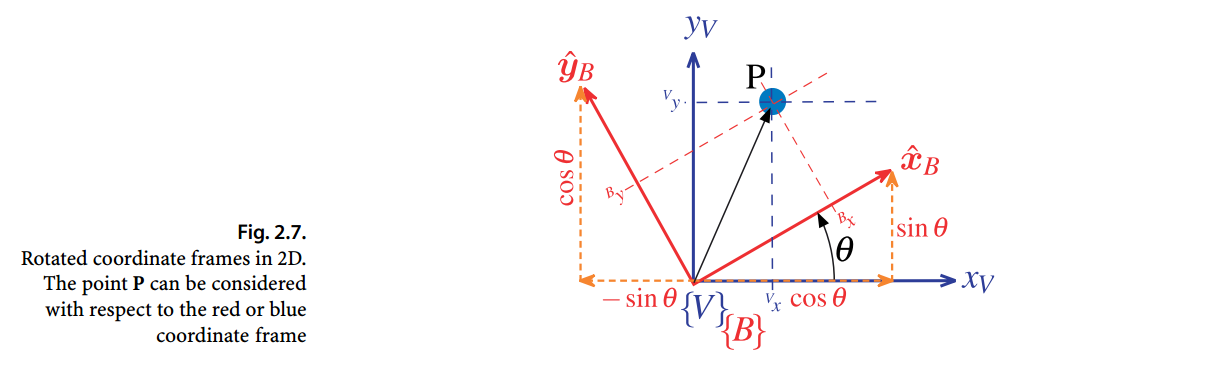
坐标系的变换(图片来自https://www.cnblogs.com/j-c-y/p/12010152.html)
惯性张量与惯性距
惯性张量的定义:
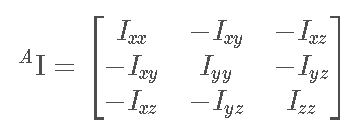
其中,Ixx, Iyy, Izz为惯性矩。
如何从惯性张量中获得惯性主轴:
惯性张量 I 的特征值和特征向量等于主惯性矩和主惯性轴的方向!
[v, D]=eigs(I);
为什么惯性张量的特征值和特征向量等于主惯性矩和主惯性轴的方向?
这与定义主惯性矩的方式有关:惯性积为零定义为主轴的条件
这样定义的话,惯性张量仅有主对角元为非零元素,即主轴方向上的主惯性矩,而此时恰好符合特征值的定义。
从矩阵视角看,某一坐标系下定义的惯性张量通过正交相似变换得到特征值矩阵(主惯性矩)AΦ = ΦΛ,而那个正交相似矩阵Φ就是特征向量的向量组(特征向量矩阵)。
坐标系旋转
刚体的惯性张量与坐标系旋转之间存在联系,可以通过惯性张量获得转动角度。
如何得到θ,假设我们是关于z轴旋转:
θ = atan(v(2,1)/v(1,1));
其中,V为惯性张量I的特征向量。
应用
结构复模态的旋转
 ----------->
----------->
旋转前 沿惯性主轴旋转后
 ----------->
----------->
快去成为你想要的样子!

